Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Определение посадки судна и остойчивости при приёмке и снятии больших грузов.Содержание книги
Поиск на нашем сайте Влияние переноса твердых грузов на посадку и начальную остойчивость судна. Примем сначала допущение, что в исходном равновесном положении судно имеет посадку прямо и на ровный киль. Предположим далее, что в общем случае некоторый твердый груз массой т переносится на судне в произвольном направлении так, что его ЦТ перемещается из точки A (x1, y1, z1) в точку В (х2, у2, z2) так, как показано на рис. 2.10. Для того, чтобы определить влияние такого переноса груза на посадку и начальную остойчивость судна, воспользуемся следующим методом исследования. Располагая в точке А начало вспомогательной координатной системы Axyz, разложим перемещение АВ на три перемещения в направлениях координатных осей и будем рассматривать сначала влияние вертикальной составляющей перемещения груза (в направлении оси Az), а затем влияние горизонтально-поперечной и горизонтально-продольной составляющих (в направлениях осей Ау и Ах). Перемещение груза вдоль оси Oz (рис. 2.11) не создает момента, способного вызвать наклонение судна, и, следовательно, его посадка при таком перемещении не изменится, если начальная остойчивость останется положительной и судно будет по-прежнему находиться в состоянии устойчивого равновесия. Приращения поперечной и продольной метацентрических высот определяем как суммы приращений их отдельных компонентов согласно формулам (2.7) и (2.8): δh = δzm - δzg; δН = δzM - δzg. (2.24) При неизменной посадке судна δzm = δzм = 0, поэтому δh = δH = -δzg. (2.25) Для определения приращения δzg аппликаты ЦТ судна может быть использована известная теорема теоретической механики: если в системе материальных тел одно из тел получит перемещение в каком-либо направлении, то ЦТ всей системы переместится в том же направлении, причем величины перемещений будут обратно пропорциональны массам тела и всей системы. Применительно к рассматриваемому случаю вертикального перемещения груза указанная теорема приводит к выражению δzg = (m/Δ)(z2-z1), (2.26)
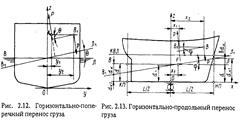
где Δ -.водоизмещение судна вместе с переносимым грузом; z1 и z2 -координаты ЦТ груза до и после переноса. Подставляя (2.26) в (2.25), получаем δh=δH= - (m/Δ)(z2-z1), (2.27) Выражение (2.27) показывает, что перенос груза по вертикали вниз (z2 < z1) приводит к увеличению остойчивости судна, а перенос по вертикали вверх - к ее уменьшению. При горизонтально-поперечном переносе груза (в направлении оси Оу) из точки А1(у1) в точку Вг(у2) начальная остойчивость не изменится, так как ни аппликата метацентра, ни аппликата ЦТ судна не получат приращений (рис. 2.12).
Однако посадка судна изменится оно получит крен θ. Заметим, что перенос груза на расстояние А1В1 можно представить как снятие груза из точки A1 и прием такого же груза в точку В1. Приложив к судну в этих точках две равные, но противоположно направленные силы р = mg, видим, что перенос груза приводит к образованию пары сил на плече (у2 - yt) cos θ. Момент этой пары сил, являющийся кренящим моментом, равен MKp=p(y2-y1)cosθ. (2.38) Поскольку угол 6 предполагается малым, можно принять cos θ = 1, т. е. Мкр=р(у2-у1). (2.29) Приравнивая (в равновесном наклонном положении судна) кренящий момент восстанавливающему Мв =Р(h + δh)δ, находим (2.30) где δh - приращение начальной метацентрической высоты, являющееся следствием рассмотренного ранее влияния вертикальной составляющей перемещения груза. При горизонтально-продольном переносе груза из точки B1(x1) в заданную точку В2(х2) (рис. 2.13) начальная остойчивость судна, как и в предыдущем случае, не изменится, но возникнет дифферент судна, угол которого по аналогии может быть найден в соответствии с формулой Ψ = р(х2-х1)/ Р(Н + δH) = т(х2-х1)/ Δ(H+δH) (2.31) Практически важно знать не угол дифферента, который обычно весьма мал, а изменение осадок носом и кормой и дифферент судна. Проведем новую ватерлинию равновесия B1Л1 под углом Ψ к первоначальной ватерлинии ВЛ. При малом угле Ψ можно считать, что ватерлинии ВЛ и B1Л1 как равнообъемные пересекутся по оси, проходящей через их общий ЦТ F (xf). Тогда новые осадки носом и кормой будут равны dH l = d + (L/2 - хf)Ψ; dK l = d- (1/2 + хf)Ψ. (2.32) Как было отмечено ранее, все полученные зависимости основаны на допущении, что судно до переноса груза сидело прямо и на ровный 'киль. Если же в действительности судно имело начальные (малые) углы крена и дифферента, то при определении новых углов крена и дифферента по формулам (2.30) и (2.31) в числители этих формул следует подставить алгебраические суммы моментов, возникающих в результате переноса груза, и моментов Phθ0 и РHΨ0, отвечающих начальным углам крена и дифферента. Выполнив это, получим (2.33)
Формулы (2.33) показывают, что в этом случае даже при отсутствии перемещений груза в направлении осей Ох и Оу его перемещение в направлении оси Oz приводит не только к изменению начальной остойчивости судна, но и к появлению дополнительных углов крена и дифферента Имеется плакат с формулами. ПРАВИЛО 5.НАБЛЮДЕНИЕ. Каждое судно должно постоянно вести надлежащее визуальное и слуховое наблюдение, так же как и наблюдение с помощью всех имеющихся средств, применительно к преобладающим обстоятельствам и условиям, с тем чтобы полностью оценить ситуацию и опасность столкновения. Каждое судно должно вести постоянное наблюдение всегда, т.е. независимо от состояния видимости и района плавания. На морском флоте существует термин "впередсмотрящий" – это человек (один или несколько, включая вахтенного помощника), который уделяет все свое внимание наблюдению и не принимает на себя каких-либо обязанностей, которые снижают эффективность надлежащего наблюдения в ЛЮБЫХ условиях видимости. Наблюдение должно обеспечивать не только своевременное обнаружение судов, но и определение характера их действия. Надлежащее наблюдение означает использование всех имеющихся для этого возможностей, включая визуальное и слуховое наблюдение, а также наблюдение с использованием технических средств. В условиях ограниченной видимости, кроме визуального наблюдения, должно осуществляться слуховое и радиолокационное наблюдение. При радиолокационном наблюдении с помощью РЛС, САРП и АИС должны учитываться их технические возможности и ограничения (теневые секторы, мертвая зона, дальность обнаружения и т.п.). Также должно осуществляться постоянное прослушивание эфира с помощью УКВ радиостанции на 16 канале.
Билет №4.
|
||
|
|
Последнее изменение этой страницы: 2016-12-11; просмотров: 386; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.008 с.) |