
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Геометрия корпуса судна. Теоретический чертеж. Посадка судна.Содержание книги
Поиск на нашем сайте Геометрия корпуса судна Различают конструктивные, расчетные, наибольшие и габаритные размерения корпуса судна. К конструктивным размерениям, под которыми понимают главные размерения, относятся: - длина судна (L) - расстояние по КВЛ между крайними точками пересечения ее с ДП. - ширина судна (В) - наибольшая ширина КВЛ. - высота борта (Н) - расстояние, измеряемое в плоскости мидель-шпангоута от основной плоскости до линии палубы у борта. - осадка судна (Т) - расстояние между плоскостями KBЛ и основной, измеряемое в сечении, где пересекаются плоскости мидель-шпангоута и диаметральная. КВЛ- конструктивная ватерлиния Размерения, соответствующие погружению судна по расчетную терлинию, называются расчетными. Наибольшие размерения соответствуют максимальным размерам корпуса без выступающих частей (штевней, наружной обшивки и т.д.). А габаритные размерения соответствуют максимальным размерам корпуса с учетом выступающих частей. Форма корпуса определяется соотношениями главных размерений и коэффициентами полноты. Наиболее важными характеристиками являются отношения: L/B - значительной степени определяющее ходкость судна: чем больше скорость судна, тем больше это отношение; В/Т - характеризующее остойчивость и ходкость судна; Н/Т - определяющее остойчииость и непотопляемость судна; L/H - от которого в известной степени зависит прочность корпуса судна. Для характеристики формы обводов корпуса различных судов служат так называемые коэффициенты полноты. Они не дают полною представления о форме корпуса, но позволяют численно оценить главные ее особенности. Основными безразмерными коэффициентами полноты формы подводного объема корпуса судна являются: - коэффициент полноты водоизмещения (общей полноты) δ - это отношение погруженного в воду объема корпуса, называемого объемным водоизмещением V, к объему параллелепипеда со сторонами L, B, T: δ= V/(L×B×T) - коэффициент полноты площади ватерлинии α - отношение площади ватерлинии S к площади прямоугольника со сторонами L,B: α= S/(L×B) - коэффициент полноты площади мидель-шпангоута β - отношение площади мидель-шпангоута ωФ к площади прямоугольника со сторонами В, Т; β= ωФ/(В×Т) - коэффициент продольной полноты φ - отношение объемного водоизмещения V к объему призмы, основанием которой служит площадь мидель-шпангоута ωФ, а длиной - длина судна L: φ= V/(ωФ×L)=δ/β - коэффициент вертикальной полноты χ - отношение объемного водоизмещения V к объему призмы, основанием которой служит площадь ватерлинии S, а высотой - осадка судна Т: χ = V/(S×T)=δ/α Приведенные выше коэффициенты полноты обычно определяются для судна, сидящего по грузовую ватерлинию. Однако они могут быть отнесены также и к другим осадкам, причем входящие в них линейные размеры, площади и обьемы берут в этом случае для действующей ватерлинии судна. Теоретический чертеж Теоретический чертеж представляет собой графическое изображение теоретической поверхности корпуса судна, в качестве которой принимается внутренняя поверхность наружной обшивки (без учета наружной обшивки). Он образуется путем проектирования различных сечений корпуса судна на три главные взаимно перпендикулярные плоскости: фронтальную, горизонтальную и профильную. За фронтальную плоскость проекции принимают продольно-вертикальную плоскость, проходящую вдоль всего судна по середине его ширины и разделяющую судно на две симметричные части - правую (правый борт) и левую (левый борт). Эту плоскость называют диаметральной плоскостью (ДП). За горизонтальную плоскость проекции принимают плоскость, проходящую через самую нижнюю точку корпуса судна перпендикулярно диаметральной плоскости. Эту плоскость называют основной плоскостью (ОП). За профильную плоскость принимают вертикально-поперечную плоскость, которую проводят посередине проектной (расчетной) длины судна. Эту плоскость, делящую судно на две части - носовую и кормовую, называют плоскостью мидель-шпангоута и обозначают знаком. Для более полного изображения формы обводов на теоретическом чертеже поверхность корпуса судна рассекают системой вспомогательных плоскостей, параллельных указанным выше трем главным плоскостям проекции. При пересечении поверхности корпуса судна плоскостями, параллельными плоскости мидель-шпангоута, получают кривые линии - теоретические шпангоуты. Изображение проекции всех шпангоутов на плоскости мидель-шпангоута называют корпусом. При пересечении поверхности корпуса судна плоскостями, параллельными диаметральной плоскости, образуются кривые линии - батоксы. Изображение проекции всех батоксов па ДП называют боком. При пересечении поверхности корпуса судна, плоскостями параллельными основной плоскости, получают кривые линии - теоретические ватерлинии. Изображение проекции всех ватерлинии на основную плоскость, образует третью проекцию теоретического чертежа, которая называется - полуширотой. Пересечение основной плоскости с диаметральной образует основную линию (ОЛ), а пересечение ДП с теоретической поверхностью корпуса судна в днищевой части — килевую линию. Ватерлиния, которая совпадает с поверхностью спокойной воды, при плавании судна с полной нагрузкой по проектную осадку, называется конструктивной (KВЛ) или грузовой (ГВЛ). Любая другая ватерлиния, соответствующая конкретному случаю нагрузки, называется расчетная. Для точного построения теоретического чертежа производится мысленное сечение корпуса рядом дополнительных плоскостей, параллельных основным.Все линии теоретического чертежа должны иметь плавный характер, кроме мест, где поверхность корпуса имеет переломы. По внешнему виду теоретического чертежа можно судить о назначении судна, ето мореходных качествах. Острые образования ватерлинии - признак того, что судно предназначено для больших скоростей. "Полные" образования говорят о том, что судно тихоходное. Наклонные носовые батоксы и развалистые шпангоуты характеризуют хорошую восходимость на волну, нос не зарывается в воду. На теоретическом чертеже иногда проекцию "корпус" располагают в средней части проекции "бок", когда судно имеет значительную цилиндрическую вставку. Проектные теоретические чертежи крупных судов выполняют в масштабе 1:100, малых судов - 1: 50 или 1:25. При постройке судна теоретический чертеж выполняют на плазе в масштабе 1:1 или 1:10. Посадка судна. Посадкой называется положение судна относительно спокойной поверхности воды и определяется параметрами: - Если ДП наклонена на некоторый угол по отношению к вертикальной плскости, то таким параметром будет угол θ, который называют углом крена; - если плоскость мидель-шпангоута наклонена на некоторый угол по отношению к вертикальной плоскости, то таким параметром будет ψ, называемый углом дифферента. Посадка судна, при которой плоскость мидель-шпагоута и ДП вертикальны (=0, = 0), называется прямой. Судно, имеющее такую посадку, принято называть сидящим прямо и на ровный киль. Если θ > 0,ψ = 0, то говорят, что судно сидит на ровный киль, но с креном; если ψ > 0, θ = 0, то говорят, что судно сидит прямо, но с дифферентом. Если судно имеет и крен, и дифферент, то его посадку называют произвольной. У судов, имеющих посадку с дифферентом, действующая ватерлиния будет находиться на равных расстояниях от основной плоскости у носового и кормового перпендикуляров. Эти расстояния называют соответственно осадкой носом Тн и осадкой кормой Тк. Дифферент судна принято определять не углом дифферента ψ, а разностью осадок носом и кормой, т.е. d = Тн - Тк. Если Тн > Тк - судно имеет дифферент на нос, если Тн < Тк - дифферент на корму. При Tн=Тк судно сидит на ровный киль. Полусумма осадок носом и кормой называется средней осадкой или осадкой при мидель-шпангоуте: Тср=(Тн +Тк)/2Контроль за посадкой судна осуществляется по маркам осадок (маркам углубления), которые наносятся на форштевне, в районе мидель-шпангоута и на ахтерштевне. Марки осадок соответствуют действительной осадке судна. Марки осадок наносятся по соответствующим перпендикулярам, с левого борта обозначаются римскими цифрами и обозначают осадку в футах, на правом борту - арабскими цифрами - осадку в дециметрах. По мере перехода всех стран на метрическую систему мер марки углубления во всех странах будут обозначаться арабскими цифрами. В настоящее время на судах получают широкое применение осадкомеры - специальные приборы, показывающие осадку автоматически на ходовом мостике. Требование МППСС к ходовым огням
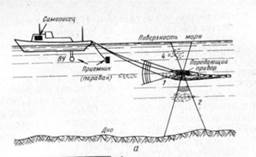
Правило 21ОПРЕДЕЛЕНИЕ (а) "Топовый огонь" представляет собой белый огонь, расположенный в диаметральной плоскости судна, освещающий непрерывным светом дугу горизонта в 225 градусов и установленный таким образом, чтобы светить от направления прямо по носу до 22,5 градуса позади траверза каждого борта. (b) "Бортовые огни" представляют собой зеленый огонь на правом борту и красный огонь на левом борту; каждый из этих огней освещает непрерывным светом дугу горизонта в 112,5 градуса и установлен таким образом, чтобы светить от направления прямо по носу до 22,5 градуса позади траверза соответствующего борта. На судне длиной менее 20 м бортовые огни могут быть скомбинированны в одном фонаре, выставляемом в диаметральной плоскости судна. (с) "Кормовой огонь" представляет собой белый огонь, расположенный, насколько это практически возможно, ближе к корме, освещающий непрерывн6ым светом дугу горизонта в 135 гр. и установленный таким образом, чтобы светить от направления прямо по корме дог 67,5 гр. в сторону каждого борта. (d) "Буксировочный огонь" представляет собой желтый огонь, имеющий такие же характеристики, как и "кормовой", описанный в пункте (c) этого Правила. (e) "Круговой огонь" представляет собой огонь, освещающий непрерывным светом дугу горизонта в 360 градусов. (f) "Проблесковый огонь" представляет собой огонь, дающий проблески через регулярные интервалы с частотой 120 или более проблесков в минуту. Правило 22ВИДИМОСТЬ ОГНЕЙ Огни, предписанные этими Правилами, должны иметь интенсивность, указанную в пункте 8 Приложения 1 к этим Правилам, с тем чтобы огни были видимы на следующих минимальных расстояниях: (а) На судах длиной 50 м или более: топовый - 6 миль; бортовой - 3 мили; кормовой - 3 мили; буксировочный - 3 мили; белый, красный, зеленый или желтый круговой огонь - 3 мили; (b) На судах длиной 12 м и более, но менее 50; топовый - 5 миль, но если длина судна менее 20 м - 3 мили; бортовой - 2 мили; кормовой - 2 мили; буксировочный - 2 мили; белый, красный, зеленый или желтый круговой огонь - 2 мили; (с) На судах длиной менее 15 м: топовый - 2 мили; бортовой - 1 мили; кормовой - 2 мили; буксировочный - 2 мили; белый, красный, зеленый или желтый круговой огонь - 2 мили; (d) На малозаметных полупогруженных буксируемых судах или буксируемых объектах: белый круговой огонь - 2 мили. Билет № 2 № 1 Графическое счисление пути судка при различных условиях плавания. Счислением координат судна называется вычисления текущих координат от известных по времени, курсу и скорости с учётом влияния ветра и течения. Графическим называется счисление, которое ведётся на морской навигационной карте с использованием штурманского прокладочного инструмента. Прокладка бывает предварительной и исполнительной. Предварительная осуществляется при выборе пути судна на переход. Выбор пути определяется его безопасностью и экономичностью. Графическое счисление заключается в систематическом нанесении положения судна на карту по направлению его движения и пройденному расстоянию на основании показаний компаса и лага, а также сведений о дрейфе и течении. Начальная точка счисления должна быть известна. Место полученное по счислению называется счислимым. Контроль за прокладкой ведётся при помощи ОМС навигационным, астрономическим и радионавигационным способами. Счисление должно быть непрерывным, наглядным и точным, т.е. оно должно давать возможность штурману в любой момент видеть нанесённое на карте положение судна относительно окружающей обстановки. Условием, обеспечивающим непрерывность счисления, является автономность и непрерывность работы ТСС и следование правилам НШС-82. При ведении прокладки решается 2 задачи: прямая и обратная. Прямая предусматривает учёт движения судна, когда курс рулевому уже задан; обратная состоит в определении курса, который следует задать рулевому для следования требуемым ИК. № 2 Принцип действия, устройство, эксплуатация сетного зонда с акустическим каналом связи. Рассмотрим принцип работы сетного зонда с акустическим каналом связи (рис. 156). В передающем приборе, установленном на верхней подборе, размещен датчик эхолотного типа, который периодически зондирует обстановку над тралом и под ним. Сначала излучается импульс вверх, а затем — вниз. Передающий прибор имеет две • акустические антенны, подключаемые поочередно на определенное время к приемно-излучающему блоку. Все эхо-сигналы, отраженные от косяков рыбы, дна, МП трала, поверхности моря и т. д., воспринимаются этими антеннами (в режиме «прием»), затем кодируются методом частотной модуляции и по акустическому каналу связи, работающему в постоянном режиме в пределах сравнительно широкого угла направленности, передаются на принимающие устройства. Установленный в передающем приборе термодатчик постоянно измеряет температуру воды, окружающей трал, и один раз за цикл (излучение — прием вверх и вниз) выдаст данные,
которые также кодируются и вместе с остальной информацией передаются на приемник. Прием ведется на антенну, установленную на буксируемом параване или на выдвижном устройстве (ВУ). Принятая информация поступает в штурманскую рубку на многоперьевой самописец с электронным коммутатором. После усиления и раскодирования поступивших данных на эхограмме самописца отображается реальная подводная обстановка. Объекты, находящиеся над тралом и под ним, в таком же порядке располагаются и на эхограмме (рис. 156,6). Здесь нулевая линия соответствует ВП трала. Температура воды в районе трала записывается сплошной линией над ВП трала 1 и в любой момент определяется ординатой от нулевой линии до ее записи в соответствии с измеряемым диапазоном. В сетных зондах с акустическим каналом связи в отличие от кабельных зондов эхо-сигналы нормализуются, и запись всех косяков рыбы происходит с одинаковой контрастностью независимо от плотности скоплений. В рассмотренных сетных зондах осуществлена частичная «привязка» косяков рыбы к тралу по глубине. Наводка же трала на косяк по-прежнему производится судовыми гидроакустическими станциями. На основе информации, получаемой от сетных зондов, штурман может лишь судить, насколько удачно произведена наводка на косяк, и примерно оценить количество рыбы, зашедшей в трал. Однако этих данных недостаточно для того, чтобы штурман мог принять решение об изменении курса траления с целью облова более плотных косяков. Чтобы наводить трал на косяк но данным, измеренным относительно трала, необходимы сетные зонды гидролокационного типа. СКОЛ-1500 —это бескабельный траловый зонд с акустическим каналом связи, по которому на судно передается информация о положении трала и промысловой обстановке в его зоне. Информация передается на судно направленной передающей антенной в виде частотно-модулированных сигналов. Эффективность работы СКОЛ-1500 определяется ее оптимальными возможностями. ü расстояние от верхней подборы трала до поверхности воды до 600 м, а до грунта — до 400 м; ü вертикальное раскрытие трала от 3 до 60 м; ü температуру воды на глубине хода трала от минус 3 до плюс 27 °С. ü наличие рыбных скоплений в зоне действия эхолотных антенн на расстоянии 600—1000 м. ü Сбор и передача такой информации возможны при следующих условиях: ü волнение на море до 6 баллов; ü скорости судна до 6 уз и циркуляции до 20 °; ü расстоянии от подводного блока до приемной буксируемой антенны не более 3 км, ü а до антенны в выдвижном устройстве — не более 2000 м; ü глубине погружения до 1500 м. ü Основные технические характеристики: ü эхолотная частота 48 кГц; ü частота в канале связи 28—30 кГц; ü характеристики направленности эхолотных антенн 30°, антенны связи — 36°; ü мертвая зона 2,5 м, разрешающая способность 1 м; ü погрешность измерения температуры ±0,6, а расстояния— 1-1,5%; ü время непрерывной работы подводного блока 9 ч; ü время спуска (подъема) буксируемого устройства 30 с. ü В состав системы входят следующие приборы и устройства: ü подводный блок или измерительно-передающее устройство (ИП); ü приемное устройство двух типов — выдвижное и буксируемое; ü лебедка с пультом управления (УЛ); прибор регистрации и сигнализации (PC). В комплект входят также вспомогательные устройства — выносной блок питания, блок для зарядки аккумуляторов. Измерительно-передающее устройство. ИП является основным прибором системы. Оно предназначено для сбора информации в зоне трала и передачи ее по акустическому каналу связи в виде частотно-модулированных колебаний на судно две эхолотные антенны для сбора информации в верхнем и нижнем направлениях от подборы трала; антенна связи (для передачи информации на судно); блок управления и синхронизации; эхолотный генератор (для формирования зондирующих импульсов); эхолотный усилитель (для усиления и преобразования сигналов); генератор связи (для формирования частотно-модулированных колебаний); преобразователь температуры (для формирования временного интервала и защиты аккумуляторной батареи); Акустические антенны (две эхолотные антенны и антенна связи) выполнены одинаково и предназначены для излучения, приема и преобразования сигналов. Пьезокерамические антенны (или вибраторы) установлены герметично в корпусе прибора и рассчитаны на погружение до 1500 м. Поверхность антенны, закрытая, резиной, является рабочей, а боковая — посадочной. Она выполняется с большой точностью. На ней имеются канавки для уплотнительных колец, с помощью которых обеспечивается герметичная установка антенны в приборе ИП. Крепится антенна в корпусе винтами. Антенна связи закреплена на корпусе под наклоном к горизонту. Угол наклона можно дискретно изменять (вручную) через 7,5° от 5 до 50°. Блок синхронизации и управления предназначен для выработки импульсов синхронизации прибора ИП и прибора PC, а также для управления работой прибора ИП. Блок состоит из задающего генератора, цепочки делительной частоты, дешифратора и каскадов согласования. В качестве задающего применен кварцевый генератор частоты. Для формирования временных интервалов используются делители частоты на триггерах. Блоком синхронизации создаются: №3 Тали, их классификация, устройство, назначение, применение. Расчет грузоподъемности талей. Тали – устройства, позволяющие не только изменить направление тяги, но и получить выигрыш в силе при подъёме и перемещении грузов, обтягивании снастей и в других случаях.. По конструкции тали подразделяются на 2 вида: обыкновенные и механические. Обыкновенные тали состоят из 2-х блоков, через шкивы которых пропущен трос, называемый лопарем. Один конец лопаря, закреплённый за блок, называется коренным, другой, выходящий из блока (к которому прикладывается усилие) называется ходовым. Один блок талей – неподвижный, через подвеску закрепляется на месте. По числу шкивов в обоих блоках тали делятся на 2-х, 3-х, 4-х и многошкивные. Величина усилия, прикладываемого к ходовому концу лопаря, выходящего из неподвижного блока равна: P = ((1 + n / k) / n) *Q; когда ходовой конец лопаря выходит из подвижного блока, величина усилия будет равна: P = ((1 + n / k) / (n + 1)) *Q, где P – усилие, прикладываемое к ходовому концу лопаря; Q – масса груза; n – суммарное количество шкивов; k – коэффициент (для стального троса 10, для растительного – 6). Дифференциальные тали: при соотношении диаметров шкивов верхнего блока 7:8 выигрыш в силе получается в 16 раз, при соотношении 11:12 - в 24 раза. Для подъёма груза Q: №4 Плавучесть судна. Условия плавучести. Уравнения равновесия одна. Требования Регистра. Плавучесть – способность судна держаться в определённом положении относительно поверхности воды. В центре тяжести судна G (XG, YG, ZG), приложена сила веса Р, действующая вертикально вниз, в центре величины (центре тяжести погруженного объёма) судна С (XC, YC, ZC) приложена сила плавучести, действующая вертикально вверх. Для равновесия этих сил (плавающего судна) эти силы должны быть равны по модулю и лежать на одной вертикали.
Приведенные выше формулы представляют собой математическое выражение условий равновесия судна. Уравнения:, γ×V=P называются основными уравнениями плавучести, т.к. они устанавливают связь соответственно между водоизмещением (массой) или весом судна и массой или весом вытесняемой им воды. Для обеспечения безопасности плавания судно должно обладать определенной потенциальной плавучестью - запасом плавучести, характеризуемой величиной непроницаемого для воды объема корпуса, расположенного выше действующей ватерлинии. Следовательно, запасом плавучести можно считать то количество грузов (или воды), которое судно может принять сверх уже находящихся на нем до полной потери плавучести. Запас плавучести обычно выражается в процентах от водоизмещения судна с полным грузом, т.е. является относительным запасом плавучести. Если непроницаемый для воды надводный объем корпуса обозначить через Vн, то относительный запас плавучести выразится отношением: A = (Vн / V) × 100% Относительный запас плавучести различен у судов разных типов и составляет: для пассажирских судов - около 80 %, сухогрузов - 25 - 50 % и танкеров - 15 - 25 %. Сохранение запаса плавучести и его конструктивное обеспечение имеют жизненно-важное значение для всякого судна. Достаточный запас плавучести в процессе проектирования и постройки судна достигается рядом конструктивных мероприятий, к числу которых относятся: обеспечение достаточной высоты надводного борта, устройство водонепроницаемых закрытий и разделение судна на отсеки прочными водонепроницаемыми переборками и палубами. При отсутствии последних, любое повреждение подводной части судна может привести к полной потере запаса плавучести и гибели судна. Запас плавучести в этом случае конструктивно не обеспечен. №5 МППСС-72: ответственность за соблюдение правил. А). Ничто в настоящих Правилах не может освободить ни судно, ни его владельца, ни капитана, ни экипаж от ответственности за последствия, могущие произойти из-за невыполнения этих Правил или от пренебрежения предосторожностью, соблюдение которой требуется обычной морской практикой или особыми обстоятельствами данного случая. b). При толковании и применении этих Правил следует обращать должное внимание на всякого рода опасности плавания и опасности столкновения и на все особые обстоятельства, включая особенности самих судов, которые могут вызвать необходимость отступить от этих Правил для избежания непосредственной опасности.
БИЛЕТ № 3.
При пониженной видимости возможности зрительного наблюдения окружающей обстановки и применения методов определения места судна, основанных на визуальных наблюдениях навигационных ориентиров и небесных светил, либо ограничены, либо вовсе исключены. При подходе к зоне пониженной видимости или при внезапном ухудшении видимости необходимо принять меры предосторожности, предусмотренные наставлением по организации штурманской службы на морских судах: уменьшить скорость хода до умеренной и начать подачу туманных сигналов согласно Международным правилам предупреждения столкновения судов в море; включить РЛС и начать радиолокационное наблюдение в соответствии с Рекомендациями по использованию РЛС для предупреждения столкновения судов; принять меры к прекращению или уменьшению посторонних шумов на судне, выставить впередсмотрящего и обеспечить надежную связь его с мостиком, выключить или затемнить огни, мешающие наблюдению, и включить (даже днем) ходовые огни, так как электрический свет может быть замечен на большем расстоянии, чем силуэт судна; определить место судна наиболее точным способом из всех возможных в данных условиях; при плавании в районах с малыми или отличительными глубинами включить на постоянную работу эхолот, а при необходимости и гидролокатор для обнаружения подводных препятствий впереди по курсу судна. При плавании вблизи берегов прокладка курсов должна осуществляться так, чтобы полоса, в пределах которой может следовать судно с заданной вероятностью, проходила бы чисто от опасностей. Счисление пути судна необходимо вести особенно тщательно с учетом ветра и течения, чаще сличать компасы, контролировать скорость хода по лагу и по частоте вращения винтов. При плавании в условиях пониженной видимости возрастает роль обсерваций, поэтому не следует упускать любой возможности для определения места судна с помощью имеющихся на судне технических средств судовождения, применять, как и при плавании в узкостях, метод ограждающих изолиний, измеряя ограждающие навигационные параметры при помощи радиотехнических и гидроакустических средств, использовать в качестве ограждающей навигационной изолинии предостерегающую для судна данной осадки изобату. Способы определения места судна: может осуществляться при помощи судового радиопеленгатора, направленных радиомаяков, гиперболических РНС и РЛС. К техническим средствам судовождения и навигационного оборудования морей, используемым при плавании в условиях пониженной видимости и не рассмотренным ранее, относятся береговые радиолокационные станции (активный и пассивный методы проводки), створные радиомаяки, воздушные и подводные звукосигнальные средства. Радиомаяки направленного действия позволяют получить непосредственно истинные пеленга, т.к. ориентированы на местности относительно истинного меридиана. К таким РМК относятся РМК с вращающейся характеристикой излучения и всенаправленные (1) или секторные (2). 1). ИРП= Uо+ (1 или 2)*n, где n – число сигналов от То до Тк; Uо – ортодромическое направление линии начала отсчета, погрешность 2 – 4, дальность действия 50- 100 миль. 2). Определение пеленга: 1. Подсчитывают число знаков N, следующих за длинным тире (началом цикла до прохождения равносигнальной зоны N1, а затем число знаков до конца передачи N2), корректируют N: ΔN= 60- (N1+ N2) / 2 => N2*N1 + ΔN. 2. При помощи карты- схемы руководствуясь φс и λс определяют сектор РМК. 3. Выбирают из спец таблиц по числу знаков N и наименования сектора РМК величину пеленга. Створный радиомаяк (радиоствор) представляет собой азимутальное радионавигационное устройство, предназначенное для проводки судов по фарватерам и рекомендованным курсам. Обычно радиостворы дублируют визуальные створы и используются при плавании в условиях пониженной видимости. В створных радиомаяках применен равносигнальный метод вождения судна, сущность которого состоит в том, что в пространстве создается узкая зона равной слышимости сигналов (равносигнальная зона). Ось равносигнальной зоны совпадает с осью фарватера или рекомендованным курсом. Створный радиомаяк (рис. 160) состоит из передатчика и двух рамочных антенн, которые устанавливаются под углом 120° относительно друг друга и под углом 60° к оси фарватера. Точка пересечения диаграмм направленности антенн (восьмерок) находится на оси фарватера. Антенны излучают в двух смежных секторах однобуквенные переплетающиеся сигналы, подобранные так, чтобы тире или точкам в одном сигнале соответствовали промежутки между тире или точками в другом. Наиболее распространенными сочетаниями являются сигналы «А» (• —) и «H» (— •). При такой передаче в пределах равносигнальной зоны образуется непрерывный звук одного тона, а по обе стороны от нее будут слышны буквенные сигналы одного или другого сектора.
Проводка судна по фарватеру или рекомендованному курсу при помощи створного радиомаяка осуществляется следующим образом. Настроив на частоту радиомаяка любой радиоприемник соответствующего диапазона или радиопеленгатор, включенный на режим кругового приема, принимают сигналы радиомаяка и устанавливают, по какую сторону от равносигнальной зоны находится судно. Затем ложатся на курс, обеспечивающий выход на ось этой зоны. Курс судна рекомендуется выбирать так, чтобы линия курса пересекала ось равносигнальной зоны под острым углом. Как только, следуя этим курсом, судно войдет в равносигнальную зону (будет слышен непрерывный звук одного тона), делают поворот и ложатся на курс, совпадающий с направлением оси равносигнальной зоны. Продолжая прослушивание сигналов радиомаяка, корректируют курс так, чтобы судно следовало в пределах равносигнальной зоны. При таком методе проводки, как и при глазомерной радиолокационной проводке, траектория движения судна будет представлять собой кривую, близкую к синусоиде. Вследствие увеличения линейной ширины равносигнальной зоны по мере удаления от створного радиомаяка чувствительность радиоствора с увеличением расстояния до радиомаяка уменьшается, границы секторов становятся более размытыми и точность удержания судна в пределах равносигнальной зоны снижается. Следует также иметь в виду, что чувствительность радиоствора, как правило, значительно ниже чувствительности визуального линейного ведущего створа. Дальность действия створных радиомаяков составляет 25—30 миль, а угловая величина равносигнальной зоны обычно не превышает 1—2°.
|
||||||
|
|
Последнее изменение этой страницы: 2016-12-11; просмотров: 736; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.102 (0.014 с.) |


 , где R и r – радиусы большого и маленького шкивов верхнего блока.
, где R и r – радиусы большого и маленького шкивов верхнего блока. , при q=y=0°
, при q=y=0° Если уклонения от равносигнальной зоны незначительны, то буквенные сигналы сектора, в котором находится судно, будут слышны на фоне сигналов другого сектора. С увеличением этого уклонения будут слышны только буквенные сигналы сектора, в котором находится судно.
Если уклонения от равносигнальной зоны незначительны, то буквенные сигналы сектора, в котором находится судно, будут слышны на фоне сигналов другого сектора. С увеличением этого уклонения будут слышны только буквенные сигналы сектора, в котором находится судно.


