

Мы поможем в написании ваших работ!
ЗНАЕТЕ ЛИ ВЫ?
|
Конструкція плунжерної електрогідравлічної рульової машини. Експлуатаційні характеристики. Схема гідроприводу і варіанти його використання.
Содержание книги
- Відцентрові насоси. Кавітація насосів. Зовнішні ознаки і способи її попередження.
- Гідравлічний привід. Об’ємний і дросельний способи регулювання, експлуатаційні характеристики.
- Повітряні компресори. Призначення, вимоги Регістра і СОЛАС-74. Конструкції, принцип дії і експлуатація.
- Шлюпочні лебідки. Призначення, вимоги Регістра і СОЛАС-74. Конструкції, принцип дії і експлуатація.
- Шестеренні насоси. Експлуатаційні характеристики. Конструкція, класифікація. Принципи дії, область застосування і експлуатація.
- Гвинтові насоси. Експлуатаційні характеристики. Класифікація, принцип дії, область застосування, конструкції і експлуатація.
- Шиберні і водокільцеві насоси. Експлуатаційні характеристики. Класифікація, принцип дії, область застосування, конструкції і експлуатація.
- Гідравлічний привід. Конструкція радіально – поршневих насосів і гідромоторов, експлуатаційні характеристики.
- Водоопріснювальні установки. Типові принципові схеми вакуумних установок. Умови здобування дистиляту високої якості.
- Якірно - швартовні машини. Конструкції, експлуатаційні характеристики, гідропривід і схема системи дистанційної віддачі якоря.
- Гідропривід пристрою для екстреного віддавання
- Вантажний електрогідравлічний кран 2КЕГ12/18. Конструкція і технічне його використання.
- Системи кондиціювання повітря. Призначення, класифікація, принцип дії.
- Теплообмінні апарати. Призначення, область застосування, класифікація, вимоги, будова і принцип дії.
- Конструкція плунжерної електрогідравлічної рульової машини. Експлуатаційні характеристики. Схема гідроприводу і варіанти його використання.
- Робочий процес поршневого компресора. Діаграми стискування, багатоступеневе стискування.
- Автоматична швартовна лебідка з гідравлічним приводом, конструкції, експлуатаційні характеристики, режим роботи.
- Сепаратори палива і масла. Призначення, область застосування. Кінематична схема тарілчастого сепаратора, принцип дії.
- Поршневые холодильные компрессоры
- Схемы автоматизации холодильных установок
- Гідравлічний привід. Конструкція аксіально-плунжерних (поршневих) насосів і гідромоторів, експлуатаційні характеристики.
- Поршневі насоси. Експлуатаційні характеристики, конструкція, класифікація, нерівномірність подачі і способи її зменшення.
- Конструкція допоміжного обладнання холодильних установок: конденсатора, випарника, масловіддільника, технічне використання.
- Балерні та безбалерні шпілі. Конструкції, експлуатаційні характеристики та їх порівняльна оцінка.
- Техническое обслуживание компрессоров
- Швартовні лебідки. Вимоги регістра, експлуатаційні характеристики. Експлуатація, техніка безпеки при експлуатації.
- Румпель РМ повертається нерівномірно в гідросистемі чути шум і поштовхи. Причини і їх усунення.
- Перелічіть послідовність операцій пуску, розвантаження та зупинки саморозвантажуючого сепаратора палива.
- Осушувальні системи та сепаратори очистки води. Заходи безпечної експлуатації.
- Описати типові системи вентиляції і пожежегасіння машинного відділення судна, види водорозпилювачів.
- Рульова машина працює неузгоджено з командами: причини і способи їх усунення.
- Углекислотная противопожарная система
- Системи водяного пожежогасіння. Призначення, схеми, вимоги Регістра, технічне використання.
- Норми зберігання стисненого повітря в балонах. Заходи і пристрої безпеки, норми технічної експлуатації балонів (огляди, випробування, ремонт, реєстрація).
- Системи об’ємного пожежегасіння: паро гасіння, піногасіння та системи сжб.
- Як забезпечується регулювання холодопродуктивності холодильної машини?
- Грузовая, балластная, зачистная и газоотводная системы
- Зарядка холодильної машини холодильним агентом. Ознаки недостачі фреона в системі і дозарядка. Техніка безпеки.
- Техническое обслуживание сепараторов
- Техническое использование ГРМ (ЭГРМ)
- Техника безопасности при выполнении слесарно-сборочных и монтажных работ на судне
- Призначення та устрій шахти машинного відділення.
- Наглядова діяльність за безпекою експлуатації суднових допоміжних механізмів, пристроїв та систем.
Плунжерные ГРМ
Плунжерные ГРМ являются наиболее распространенными в мировом судостроении. Они изготовляются многими зарубежными фирмами. Эти ГРМ, несмотря на конструктивное разнообразие, имеют установившиеся характерные особенности. Кратко изложим наиболее общие вопросы конструктивного исполнения этих ГРМ.
Схемы компоновки плунжерных ГРМ приведены на рис. 4.1. Основными их элементами являются двух- или четырехплунжерный рулевой привод (исполнительный орган ГРМ), насосы, система гидравлических коммуникаций с емкостями рабочей жидкости (на схеме не показаны) и система управления рулевой машиной. Более подробно все элементы этих ГРМ и их взаимодействие показаны и рассмотрены на функциональных схемах и принципиальных гидравлических системах.
Основные достоинства плунжерных ГРМ — надежность и долговечность работы привода, возможность эксплуатации ГРМ при различных сочетаниях четырех цилиндров. Недостатки — большие потери на трение (низкий механический КПД) в шарнирных соединениях         румпеля с плунжерами и в сальниках плунжеров, большие масса и габариты при давлениях рабочей жидкости 10—12 МПа. румпеля с плунжерами и в сальниках плунжеров, большие масса и габариты при давлениях рабочей жидкости 10—12 МПа.
Совершенствование плунжерных ГРМ идет в направлении упрощения конструкций, уменьшения массы и габаритных размеров, повышения КПД, надежности и безотказности в работе, увеличения моторесурса узлов и элементов, обеспечения простоты и удобства обслуживания, уменьшения начальной стоимости и трудозатрат на поддержание ГРМ постоянно в хорошем техническом состоянии
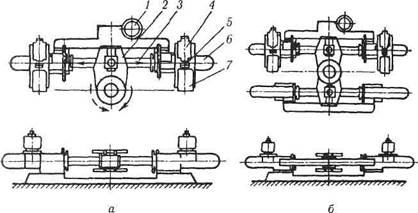
 . Схемы компоновки плунжерных ГРМ: двухплунжерная (а) и четырехплунжерная (б): 1 — штурвал местного аварийного управления, 2 — румпель, 3 — плунжер, 4 — насос, 5 — муфта, 6 — цилиндр, 7 — электродвигатель. . Схемы компоновки плунжерных ГРМ: двухплунжерная (а) и четырехплунжерная (б): 1 — штурвал местного аварийного управления, 2 — румпель, 3 — плунжер, 4 — насос, 5 — муфта, 6 — цилиндр, 7 — электродвигатель.
Рассмотрим работу автономной плунжерной ГРМ (рис. 1.4). Два идентичных исполнительных механизма ИМ (от двух линий управления) работают на один выходной управляющий элемент — шток 12, перемещение которого к является заданием для ГРМ на перекладку руля. Это задание с помощью рычагов BD (точка О при этом неподвижна) и FG, соединенных между собой в точке С, и штанги 17 передается насосам 8 регулируемой подачи, которые создают согласно полученным перемещениям e1 и е2 регулируемых органов подачу Q1 и Q2 рабочей жидкости.
Взаимное расположение насосов, приводимых в действие электродвигателями 7, таково, что их подачи складываются. При работе насосов в цилиндрах 6 плунжерного привода создается перепад давлений (р1—р2) и руль 1 посредством плунжеров 5 и румпеля 2 перемещается на некоторый угол α. При этом обратная механическая связь 4, отстоящая на расстоянии г0 от оси вращения баллера 3,

возвращает посредством рычагов БВ и РС штангу 17 в исходное среднее положение, при котором суммарное перемещение регулируемых органов насосов е — 0. Когда руль останавливается, его угол перекладки а соответствует заданию к по значению и направлению. Перемещение е штанги 17 в реальных условиях эксплуатации всегда несколько отличается от перемещений ех и е2 управляемых органов насосов из-за рассогласования их нулевых положений и люфтов в рычажном механизме управления насосами. Для согласования нулевых положений применяют регулировочное устройство — винтовые соединения 15, 16 на концах штанги NL. Серьги АВ и НQ компенсируют взаимное перемещение рычагов.
В случае отказа дистанционной системы управления рулевая машина приводится в действие штурвалом 10, соединяемым вручную с редуктором 9. Указатели положения руля на мостике получают электрический сигнал от датчика 14, приводимого в действие рычагом 13, который соединен со штоком 12.
Таким образом, данная ГРМ с механической обратной связью представляет собой самостоятельный замкнутый контур, т. е. автономную следящую систему, включенную последовательно замкнутому контуру электрической следящей системы управления.
Все ЭГРМ могут работать с любым из двух или одновременно с обоими насосами.. При этом регулируемые органы обоих насосов приводятся в движение от одной управляющей штанги независимо от того, находятся в действии один из двух или оба насоса. Насос включается в работу запуском его электродвигателя с основного поста управления (на мостике), а также из румпельного помещения.
|




