Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Обладнання для балансування коліс автомобілівСодержание книги
Поиск на нашем сайте
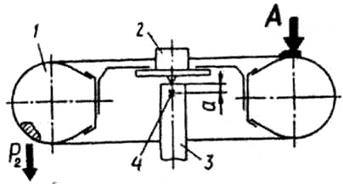
Нерівномірний розподіл матеріалу по профілю покришки приводить до розбіжності центра мас колеса з його геометричною віссю. Розрізняють статичну й динамічну неврівноваженість коліс. При статичній неврівноваженості центр маси колеса не збігається з віссю його обертання. Динамічна неврівноваженість характеризується нерівномірним розподілом маси вздовж ширині колеса, внаслідок чого створюється додатковий момент сил при обертанні колеса, який викликає його коливання. Згідно технічних умов заводів-виготовлювачів шина вантажного автомобіля може мати статичний дисбаланс, який дорівнює добутку 0,5…0,7 % маси шини на її радіус, легкового 1000…2000 г×см. Тому змонтоване й накачане колесо необхідно відбалансувати. Для усунення дисбалансу коліс провадять їх статичне, а якщо цього недостатньо, то й динамічне балансування, використовуючи при цьому свинцеві тягарці із пластинчастими притисками. На рис. 10.7 показана схема статичного балансування колеса за допомогою найпростішого пристосування, яке забезпечує балансування при горизонтальному положенні колеса (існують пристосування для статичного балансування з вертикальним положенням колеса). За рахунок «точкового» контакту пристосування 2 (тримачі колеса) з опорою 3, колесо відразу ж нахилиться по радіальній осі колеса, яка проходить через «важке місце», під дією сили Р 2. Для ліквідації неврівноваженості необхідно встановити тягарець, відповідної маси, на диск колеса з діаметрально протилежної сторони в місці А (причому неважливо – зверху або знизу).
Рис. 10.7. Схема статичного балансування колеса: 1 – колесо; 2 – пристосування; 3 – опора; 4 – центр мас
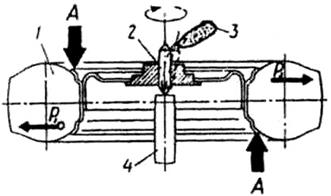
Але статичне балансування не усуває неврівноваженість від моменту, створюваного парою відцентрових сил P 1 (рис. 10.8), який виникає при обертанні колеса й прагне нахилити його разом з настановним пристосуванням і його віссю. Досить зробити крейдову оцінку на осі, у місці її найбільшого відхилення (биття) і встановити в цій площині що врівноважує грузик. Якщо його маса буде занадто велика, то її варто розділити навпіл і встановити в місцях А два
Рис. 10.8. Схема динамічного балансування колеса: 1 – колесо; 2 – пристосування; 3 – крейда; 4 – опора
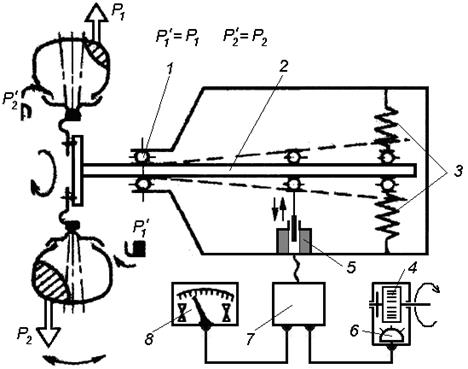
Таким чином, відмінність динамічного балансування від статичного полягає в тому, що, обертаючи колесо, прагнуть за допомогою тягарців повністю зрівноважити всі моменти та сили ваги. На СТОА й ПАТ знайшли застосування два типи балансувальних верстатів: на одних балансують колеса, зняті з автомобіля, на інші балансують колеса безпосередньо на автомобілі. Стенди першого типу застосовують при ремонтних і шиноремонтних роботах, а також під час ТО автомобілів. Стенди другого Для балансування існують стаціонарні стенди К-121, AMR-5 і інші потребуючі зняття колеса з автомобіля, а також пересувні (підкатні) стенди К-125, EWK-15V і інші, які дозволяють здійснювати балансування колеса безпосередньо на автомобілі. Усувають дисбаланс спеціальними балансувальними грузиками, які закріплюються на закраїнах обода в найбільш легких частинах колеса. Стенди для статичного балансування коліс автомобілів. Статичний дисбаланс можна усунути без стенда. Колесо встановлюють на легко обертову маточину. Важка маса колеса опуститься донизу. На протилежну сторону шляхом підбору установлюють тягарці доти, поки колесо стане нерухомим у будь-якому положенні. Цей спосіб можна рекомендувати для балансування коліс (особливо передніх) автобусів і вантажних автомобілів, а також для наварних шин, надмірний дисбаланс яких може зашкодити обладнанню. Статичне балансування знятих з автомобіля коліс провадяться на балансувальних верстатах. Колесо кріпиться до маточини, вісь обертання якої розташована горизонтально. Колесо обертають легким поштовхом спочатку в одну, а потім в іншу сторону до повної зупинки, відзначаючи крейдою нижні точки для обох випадків. Розбіжність, позначених крейдою точок, відбувається внаслідок наявності моменту сил тертя в підшипниках вала колеса. Визначивши найбільше «важке» місце колеса, що перебуває між цими точками, закріпляють на протилежній («легкій») частині обода балансувальний тягарець, який врівноважує незбалансовану масу колеса. Однак статичне балансування не у всіх випадках усуває незбалансованість колеса. Іноді після нього виникає динамічна неврівноваженість або динамічний дисбаланс. Динамічна неврівноваженість не може бути виявлена в статичному стані, вона проявляє себе тільки при обертанні колеса. На балансувальному верстаті спочатку роблять статичне балансування описаним вище способом, після чого приступають до динамічного. Сучасні стаціонарні стенди забезпечують комплексне балансування без поділу на статичне та динамічне. Спочатку визначаються найлегше місце й необхідна маса балансувальних грузиков по зовнішній напівплощині колеса, потім – по внутрішній. На деяких моделях стендів визначення дисбалансу по кожній напівплощині відбувається одночасно. Стаціонарні стенди комплексного балансування коліс. Принцип роботи стаціонарних балансувальних стендів наступний: колесо закріплюють на валу стенда (рис. 10.9) і розкручують до швидкості 650…800 об/хв. Від незбалансованих мас колеса виникає повертаючий момент, у результаті чого вал стенда здійснює коливання: горизонтальні, вертикальні або конусоподібні (залежно від конструкції стенда). Амплітуда цих коливань залежить від значення дисбалансу. Вона реєструється спеціальними датчиками, виводиться на приладову дошку, визначаються положення та маса балансувальних тягарців.
Рис. 10.9. Схема роботи динамічного балансувального стенда: P 1, Р 2 – незбалансовані маси шини (P 1 ¹ Р 2); P 1’, Р 2’ – маси балансувальних грузиків
Неврівноважена маса колеса, за рахунок різниці відцентрових сил, викликає механічні коливання вала 2 (рис. 10.9), встановленого на опорах 1, які за допомогою коливної системи 3, з опозитно розташованими пружинами, передаються на індукційний датчик 5, який перетворює їх в електричні імпульси, що надходять в електронно-вимірювальний блок 7, де вони перетворяться у відповідну напругу, яка подається на вимірювальний прилад 8. Залежно від тривалості імпульсу на шкалі відображається значення неврівноважених мас (у грамах), положення яких на колесі визначається за допомогою градуйованого диска 4, що обертається синхронно з випробуваним колесом і стробоскопічної лампи 6 – момент спалаху лампи відповідає крайньому нижньому положенню неврівноваженої маси колеса, а за рахунок стробоскопічного ефекту, воно фіксується на градуйованому диску, визначаючи точне місце дисбалансу на колесі. При статичному балансуванні колеса (яке варто проводити перед динамічним), вал верстата роз’єднують із приводом, і провадять його, як було описано вище, за умови вертикального розташування колеса. Балансування тягарцями ведеться у двох площинах: при динамічному балансуванні – у зовнішній, при статичній – у внутрішній. В ПАТ широко використовують стаціонарні, електромеханічні верстати з елементами електроніки. Вони мають високу точність виміру, безпечні в експлуатації. Всі сучасні верстати цього типу, для балансування знятих коліс, забезпечують динамічне балансування із зазначенням місця максимального дисбалансу. На більшості моделей цих верстатів можна здійснювати й статичне балансування. Конструкція такого верстата наведена на рис. 10.10.
Рис. 10.10. Верстат для балансування коліс мод. 121: 1 – корпус верстата; 2 – електродвигун; 3 – пасова передача; 7 – рукоятка рухомого кулака; 8 – педаль відключення і зупинки балансирного вала
Основні вузли верстата: корпус 1, підвіска з валом, на якому встановлюється колесо на планшайбі, рухома опора (сприймаюча коливання вала), електродвигун 2 з пасовою передачею 3, на веденому шківі якої є шкала для визначення кута положення дисбалансних мас при обертанні колеса, механізм стопоріння підвіски 4 при розкручуванні вала з колесом, блок вимірів, індукційний датчик і т.д. У табл. 10.1 наведені технічні дані верстатів для балансування коліс, знятих з автомобіля.
Таблиця 10.1 Технічні характеристики верстатів для балансування коліс, знятих
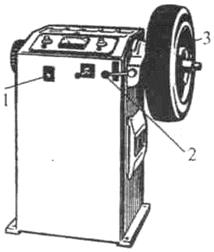
Верстат AMR-2 (рис. 10.11) призначений для балансування коліс із максимальним діаметром 850 мм, максимальною шириною 250 мм та максимальною масою 30 кг (з урахуванням маси затискного пристосування).
Частота обертання колеса, яке балансується становить 650 об/хв, максимальне припустиме значення вимірюваного дисбалансу 200 г. Погрішності виміру дисбалансу та визначення місця установки балансувального вантажу становлять відповідно: ±5 г і ±10 °. Потужність приводного електродвигуна 0,8 кВт. Габарити верстата 990×800×650 мм, маса 120 кг.
Рис. 10.11. Балансувальний верстат AMR-2: 1 – вимикач двигуна; 2 – важіль перемикання площин балансування; 3 – балансируєме колесо
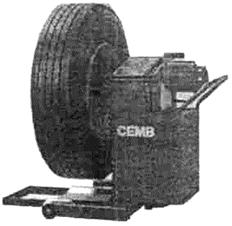
Верстат мод. Р-200 фірми «СЕМВ» (Італія) є універсальним за обсягом використання (для легкових автомобілів, вантажних, автобусів) (рис. 10.12).
Рис. 10.12. Верстат для балансування коліс вантажних автомобілів,
Пересувні стенди для балансування коліс автомобілів. Пересувні стенди забезпечують лише поетапне балансування – спочатку статичне, потім - динамічне. Розглянемо принцип роботи пересувних стендів (рис. 10.13). Вивішене автомобільне колесо 4 розкручують фрикційним шківом 1 електродвигуна стенда до частоти, що відповідає швидкості 120...170 км/год.
Рис. 10.13. Схема роботи пересувного балансувального стенда
Датчик 7, приєднаний до нижнього важеля 6 підвіски (при статичному балансуванні) або до опорного гальмового щита 5 (при динамічному), перетворює коливання колеса в електричний сигнал. На вимірювальний пристрій стенда надходять імпульси від самих нижніх точок цього сигналу, що відповідають моментам проходження важкої точки колеса через площину установки датчика 7. За амплітудою імпульсів на стрілочному індикаторі 3 визначають необхідну масу балансувальних грузиків. Імпульси також надходять до спрацьо-стробоскопічної лампи 2, при спалахах якої колесо здається нерухливим. Дане його положення запам’ятовується оператором по певній мітці, яка знаходиться на шині. Після гальмування колеса, якщо його зупинити в тім положенні, при якому запам’ятовувалася мітка, найважча маса колеса опиниться в зоні установки датчика. При усуненні статичного дисбалансу тягарці 8 розміщують рівномірно по обидва боки обода, щоб не викликати динамічного дисбалансу. При усуненні динамічного дисбалансу тягарці встановлюють вздовж діагоналі, щоб не викликати статичного дисбалансу.
Фірмою «СЕМВ» (Італія) випускається установка для балансування коліс легкових і вантажних автомобілів без зняття їх з автомобіля (рис. 10.14). При застосуванні двох трансдьюсерів і фотоелектричного повторювача є можливість балансування двох коліс однієї осі. Для вантажних автомобілів рекомендується використовувати версію L38HD. Також можливе використання трансдьюсера з гідродомкратом.
Похибка балансування, г........................................................................... ±1 Точність місця розташування дисбалансу, град................................ ±2,5 Максимальна швидкість обертання колеса.......................................... 140 Максимальне навантаження на легковий трансдьюсер, кН............... 7 Максимальне навантаження на вантажний трансдьюсер, кг............. 60 Потужність електродвигуна, кВт........................................................... 4 Напруга живлення, В3............................................................................. 80 Габаритні розміри, мм......................................................... 1030×500×610 Маса, кг....................................................................................................... 34 10.7. К онтроль кутового зміщення задніх мостів Для забезпечення нормального кочення коліс автомобіля на дорозі необхідно підтримувати задану геометрію елементів ходової частини автомобіля. У цьому випадку під терміном «геометрія» мається на увазі геометрія не форми, а взаємного положення механізмів і агрегатів. Взаємне положення елементів ходової частини істотно впливає на енергетику руху автомобіля, стабілізацію його на дорозі, зношування шин, витрату палива й т.д. При діагностуванні ходової частини необхідно визначати Під час ТО ходової частини перевіряють взаємне положення мостів за допомогою спеціальних стендів (рис. 10.15).
Рис. 10.15. Стенд для перевірки взаємного положення мостів 1 – рама; 2 – напрямні; 3 – фасонні ролики; 4 – блок живлення; 5 – важіль;
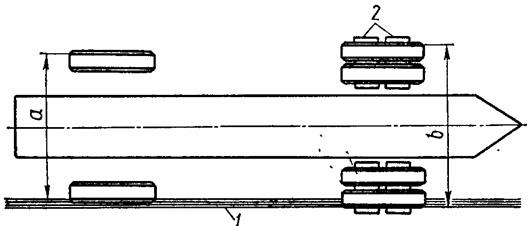
Для діагностування горизонтального перекосу мостів автомобілів можна використовувати орієнтовну лінію, яку наносять білою фарбою на проїзній частині з боку водія (рис. 10.16). Лінію 1 розташовують уздовж довжини канави. Відстань а/ 2 від осі симетрії канави до лінії вибирається залежно від моделі автомобіля. Товщина орієнтовної лінії повинна дорівнювати напіврізниці (b – а)/2 відстаней між зовнішніми кромками протектора задніх і передніх коліс. Наприклад, для ЗИЛ-130 і його модифікацій товщина лінії дорівнює 150 мм, а відстань від осі симетрії до внутрішньої кромки лінії –
Рис. 10.16. Виявлення перекосу мостів автомобіля
Якщо паралельність мостів автомобіля не порушена, то переднє колесо буде котитися зовнішньою кромкою протектора вздовж внутрішньої кромки лінії, а зовнішня кромка протектора заднього колеса - вздовж зовнішньої кромки лінії. Для діагностування автомобілів з різною шириною колії наносять кілька різнобарвних ліній. Загальну товщину цих вузьких ліній для переднього колеса вказують у сантиметрах. Розглянутий метод діагностування горизонтального перекосу мостів автомобілів можна також використовувати для правильної й швидкої установки автомобіля на стенді з біговими барабанами 2, бо орієнтування за напрямними ребордами оглядової канави при заїзді на бігові барабани стенда не забезпечує необхідної точності розміщення автомобіля щодо поздовжньої осі симетрії оглядової канави. Найбільшого поширення дотепер набули електричні прилади з панелями-екранами. Електрооптична система цих приладів (рис. 10.17) складається із двох проекторів, які містять реверсивний супорт із двома кронштейнами з обвідними затискачами й двома циліндричними напрямними, вздовж яких можуть вільно ковзати (без люфту) в залежності від виду різних контрольних операцій, два проектори високої точності, наділені обертальною віссю й комутатором. Проектори (до 1400 люменів і більше) забезпечують світловий пучок на панелі-екрани (з розміткою, розподілами кутових транспортирів і схемами різних перевірок).
Рис. 10.17. Електрооптична система вимірювальних приладів: а – циліндричні напрямні супорта; б – реверсивний супорт
Світловий пучок має затемнений сектор, так званий «індекс», який служить контрольною міткою для зчитування вимірюваних параметрів. Чіткість сектора-мітки забезпечується регульованим об’єктивом проектора. Основною перевагою приладів даного типу є можливість позбавитися похибки вимірів завдяки деформацію дисків. Крім того, можна визначити й ступінь деформації диска, що впливає на биття колеса в цілому. Для цього розкручують вивішене колесо, утримуючи проектор від обертання – на екрані добре буде видно коливання сектора-покажчика світлового променя та величину бічного зсуву. При контролі співвісності мостів (рис. 10.18) використовується метод розміщення шкал безпосередньо на колесах автомобіля.
Рис. 10.18. Розташування приладів контролю співвісності мостів
Контрольні запитання
10.1. За допомогою якого обладнання здійснюється діагностування ходової частини автомобілів? 10.2. Які прилади використовують для визначення люфтів в елементах ходової частини автомобілів? 10.3. Що таке статичне та динамічне балансування коліс автомобіля? 10.4. У чому полягає особливість процесів статичного та динамічного балансування коліс автомобіля? 10.5. Яке обладнання використовується при статичному балансуванні? 10.6. Який принцип роботи стаціонарних балансувальних стендів? 10.7. Який принцип роботи динамічних балансувальних стендів? 10.8. Навести схему стенда для балансування коліс легкових автомобілів та пояснити принцип його роботи. 10.9. За допомогою яких пристроїв визначають не зрівноваженість коліс без зняття їх з автомобіля? 10.10. Яка схема роботи підкатного балансувального стенда? 10.11. Яку будову мають сучасні автоматизовані балансувальні стенди?
Розділ 11
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-06-19; просмотров: 966; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.3 (0.011 с.) |


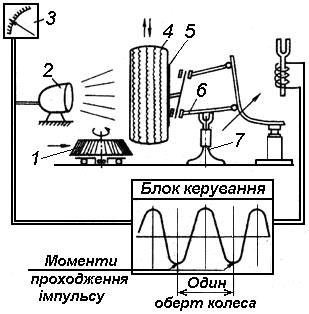
 Амплітуда електричного сигналу залежить як від значення дисбалансу, так і від жорсткості пружини, стану амортизатора, розміру колеса, тому вага балансувальних тягарців визначається приблизно, що вимагає повторення балансування (звичайно 1…2 рази) доки показаники стенда не опиняться в межах допуску приблизно 10 г (маси тягарця). Динамічне балансування проводити значно сутужніше, тому що складно забезпечити надійний контакт датчика 7 з опорним гальмовим щитом. Останнім часом ряд закордонних фірм випускають пересувні стенди лише для статичного балансування. Робота на пересувних стендах вимагає більш високої кваліфікації оператора.
Амплітуда електричного сигналу залежить як від значення дисбалансу, так і від жорсткості пружини, стану амортизатора, розміру колеса, тому вага балансувальних тягарців визначається приблизно, що вимагає повторення балансування (звичайно 1…2 рази) доки показаники стенда не опиняться в межах допуску приблизно 10 г (маси тягарця). Динамічне балансування проводити значно сутужніше, тому що складно забезпечити надійний контакт датчика 7 з опорним гальмовим щитом. Останнім часом ряд закордонних фірм випускають пересувні стенди лише для статичного балансування. Робота на пересувних стендах вимагає більш високої кваліфікації оператора.