Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Методы нахождения центра тяжестиСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Наиболее часто для нахождения центра тяжести тела или фигуры применяют следующие методы: · метод симметрии; · метод разбиения; · метод отрицательных масс. Рассмотрим приемы, применяемые в каждом из перечисленных методов. *** Метод симметрии Представим себе однородное тело, которое имеет плоскость симметрии. Выберем такую систему координат, чтобы оси x и z лежали в плоскости симметрии (см. рисунок 1).
В этом случае каждой элементарной частице силой тяжести Gi с абсциссой yi = +a соответствует такая же элементарная частица с абсциссой yi = -a, тогда: yC = Σ(Gixi)/ΣGi = 0. Отсюда вывод: если однородное тело имеет плоскость симметрии, то центр тяжести тела лежит в этой плоскости. Аналогично можно доказать и следующие положения: · Если однородное тело имеет ось симметрии, то центр тяжести тела лежит на этой оси; · Если однородное тело имеет две оси симметрии, то центр тяжести тела находится в точке их пересечения; · Центр тяжести однородного тела вращения лежит на оси вращения. *** Метод разбиения Этот метод заключается в том, что тело разбивают на наименьшее число частей, силы тяжести и положение центров тяжести которых известны, после чего применяют приведенные ранее формулы для определения общего центра тяжести тела. Допустим, что мы разбили тело силой тяжести G на три части G', G'', G''', абсциссы центров тяжести этих частей x'C, x''C, x'''C известны. xC = Σ(Gixi)/ΣGi. Перепишем ее в следующем виде: xCΣGi = Σ(Gixi) или GxC = Σ(Gixi). Последнее равенство запишем для каждой из трех частей тела отдельно: G'x'C = Σ(G'x'i), G''x''C = Σ(G''ix''i), G'''x'''C = Σ(G'''ix'''i). Сложив левые и правые части этих трех равенств, получим: G'x'C + G''x''C + G'''x'''C = Σ(G'ix'i) + Σ(G''x''i) + Σ(G'''ix'''i) = Σ(Gixi). Но правая часть последнего равенства представляет собой произведение GxC, так как GxC = Σ(Gixi), Следовательно, xC = (G'x'C + G''x''C + G'''x'''C)/G, что и требовалось доказать.
Полученные формулы аналогичны формулам для определения координат цента тяжести, выведенные выше. Поэтому в исходные формулы можно подставлять не силы тяжести элементарных частиц Gi, а силы тяжести конечных частей; под координатами xi, yi, zi понимают координаты центров тяжести частей, на которые разбито тело. *** Метод отрицательных масс Этот метод заключается в том, что тело, имеющее свободные полости, считают сплошным, а массу свободных полостей – отрицательной. Вид формул для определения координат центра тяжести тела при этом не меняется. Таким образом, при определении центра тяжести тела, имеющего свободные полости, следует применять метод разбиения, но считать массу полостей отрицательной. *** Практические методы определения центра тяжести тел На практике для определения центра тяжести плоских тел сложной формы часто применяют метод подвешивания, который заключается в том, что плоское тело подвешивают на нити за какую-нибудь точку. Прочерчивают вдоль нити линию, и тело подвешивают за другую точку, не находящуюся на полученной линии.
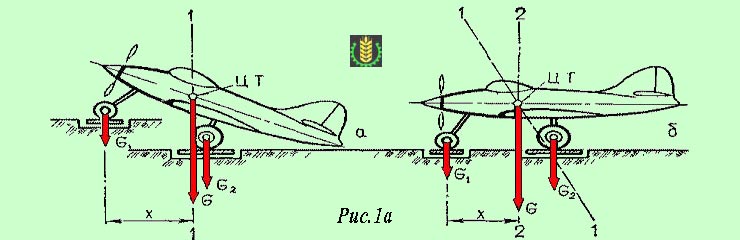
Еще один способ определения центра тяжести, применяемый на практике, называется метод взвешивания. Этот метод часто применяется для определения центра тяжести крупных машин и изделий – автомобилей, самолетов, колесных тракторов и т. п., которые имеют сложную объемную форму и точечную опору на грунт.
Вопрос 12 Момент инерции тела. МОМЕНТ ИНЕРЦИИ - величина, характеризующая распределение масс в теле и являющаяся наряду с массой мерой инертности тела при непоступат. движении. В механике различают M. и. осевые и центробежные. Осевым M. и. тела относительно оси z наз. величина, определяемая равенством
где mi - массы точек тела, hi - их расстояния от оси z, r - массовая плотность, V - объём тела. Величина Iz является мерой инертности тела при его вращении вокруг оси (см. Вращательное движение ). Осевой M. и. можно также выразить через линейную величину rz, наз. радиусом инерции относительно оси z, по ф-ле Iz = M r2z, где M - масса тела. Размерность M. и.- L 2 M; единицы измерения -кг.м2. Центробежными M. и. относительно системы прямоуг. осей х, у, z, проведённых в точке О, наз. величины, определяемые равенствами
или соответствующими объёмными интегралами. Эти величины являются характеристиками динамич. неуравновешенности тела. Напр., при вращении тела вокруг оси z от значений Ixz и Iyz зависят силы давления на подшипники, в к-рых закреплена ось. M. и. относительно параллельных осей z и z' связаны соотношением (теорема Гюйгенса)
где z' - ось, проходящая через центр массы тела, d - расстояние между осями. M. и. относительно любой проходящей через начало координат О оси Ol с направляющими косинусами a, b, g находится по ф-ле
Зная шесть величин Ix, Iy, Iz, Ixy, Iyz, Izx, можно последовательно, используя ф-лы (4) и (3), вычислить всю совокупность M. и. тела относительно любых осей. Эти шесть величин определяют т. н. тензор инерции тела. Через каждую точку тела можно провести 3 такие взаимно перпендикулярные оси, наз. гл. осями инерции, для к-рых Ixy = Iyz= Izx = 0. Тогда M. и. тела относительно любой оси можно определить, зная гл. оси инерции и M. и. относительно этих осей. Вопрос 12.1
|
||||
|
|
Последнее изменение этой страницы: 2016-08-10; просмотров: 3891; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.117.91.170 (0.007 с.) |