
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Сила й швидкість руху руки робітникаСодержание книги
Поиск на нашем сайте
Сила робітника, що прикладається безпосередньо до візка для його переміщення (штовхання), становить за величиною 80, 120 і 200 Н при відповідній тривалості роботи 15, 10 і 5 хв. Найбільш можлива сила при рушанні з місця не перевищує 500 Н. Сила робітника на важелі керування не повинна перевищувати 400 Н. Плече (радіус) обертання рукояток l p повинне не перевищувати 400 мм. Вісь обертання рукоятки розташовують звичайно на висоті 900...1000 мм від рівня підлоги. Якщо приводний вал розташований на висоті, що не припускає застосування рукоятки, використовують тягові колеса, що приводяться в обертання нескінченним ланцюгом такої довжини, щоб нижня частина її перебувала на висоті приблизно 0,6 м від поверхні, на якій стоїть робітник, керуючий машиною. Для цього використовують зварений ланцюг, виготовлений із прутка діаметром 5...6 мм. Діаметр D тягового колеса становить 300...1000 мм. Колесо має напрямні для запобігання спадання з нього тягового ланцюга. Ручка рукоятки має довжину 300...350 мм, якщо колесо обертає один робітник, і 400...500 мм – при спільній роботі двох робітників. Дві рукоятки на одному валу розташовують під кутом 120 або 90° одна щодо іншої. Плече приводних рукояток домкратів приймають у межах При перевірці рукояток, педалей і елементів ручного керування на міцність розрахунок ведуть на можливе випадкове прикладення сили, рівною вазі робітника, тобто приблизно 800 Н. При ручному механізмі з тяговим ланцюгом розрахункову силу приймають рівною 1200 Н. Швидкість підйому вантажу вагою G вт
V вт = n · F p · V p · η · φ /G вт.(20.2)
де V p – швидкість руху руки робітника. Відповідно до рівняння, швидкість підйому вантажу тим менша, чим більша його вага. Однак це рівняння припустиме лише для вантажів номінальної маси. Позаяк швидкість руки робітника змінюється в незначних межах, тому при постійному передаточному числі механізму різні вантажі піднімають практично з незмінною швидкістю. При цьому сила Fp змінюється пропорційно зміні ваги вантажу. Тому для збільшення швидкості підйому вантажів малої ваги й порожнього гака в ручних механізмах застосовують передачі зі змінним передаточним числом або рукоятки зі змінним плечем. Час підйому вантажу на висоту h визначають на підставі рівняння рівномірного руху
t = h /V гр = η · G гр / (n · F p · V p · η · φ). (20.3)
Аналогічно швидкість пересування візка або крана з ручним приводом механізму становить
V пер = n · F p · V p · η · φ /Wc, (20.4)
тобто кутова швидкість механізму повороту:
ω = n · F p · V p · η · φ / (Σ Mci). (20.5)
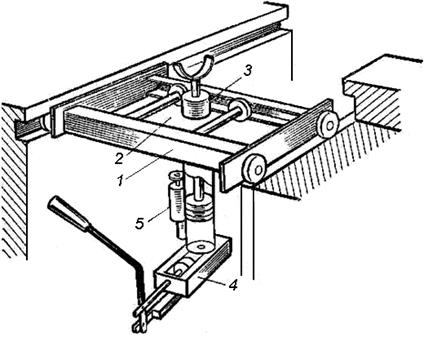
Ручний привод має також одноплунжерний гідравлічний канавний підйомник (рис. 20.2) для монтажу й демонтажу агрегатів трансмісії автомобілів. Фактично цей підйомник представляє собою гідравлічний домкрат, встановлений на візку 2, який переміщують вздовж канавних напрямних, встановлюючи в будь-якій зоні канави.
Рис. 20.2. Канавний одноплунжерний гідравлічний підйомник: 1 – рама; 2 – візок; 3 – гідравлічний циліндр; 4 – ручний гідравлічний насос; 5 – пропускний клапан Задля уникнення мимовільного опускання штока підйомника застосовується спеціальний фіксуючий пристрій. Підйомник може піднімати вантаж до 4 тна висоту до 0,60 м. До недоліків такого підйомника відносяться труднощі доступу до агрегатів знизу автомобіля, перекритих рамою 1 й візком 2 та погіршення умов переміщення робітників уздовж канави.
Електромеханічні приводи технологічного Обладнання
В електроприводах обладнання для експлуатації та ремонту автомобілів використовують двигуни змінного та постійного току. Найбільш поширені асинхронні електродвигуни змінного струму з короткозамкненим ротором. Для поступального руху робочих органів обладнання для експлуатації та ремонту автомобілів широко використовують суміщення електродвигуна, редуктора (конічного, черв’ячного, циліндричного) і гвинта (рис. 20.3).
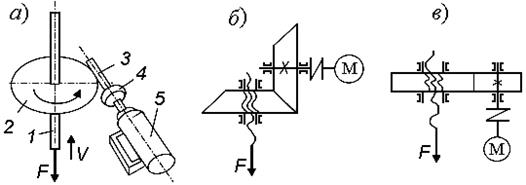
Рис. 20.3. Електропривод з гвинтовою передачею: а – схема з черв’ячним редуктором; б – з конічним редуктором; в – з циліндричним редуктором
Вал двигуна 5 (рис. 20.3, а) з’єднано муфтою 4 з черв’яком 3. Черв’ячне колесо 2 редуктора має нарізку і служить одночасно гайкою гвинту 1. При обертанні черв’яка черв’ячне колесо (гайка) обертається, а гайка гвинта рухається поступально. Переваги такої конструкції – простота, надійність, реверсивність, компактність при великому навантаженні, можливість забезпечення великої точності руху, а також автоматизація управління робочим органом. Недоліки – значні втрати на тертя та мале значення ККД, неможливість використання при великих швидкостях руху. Потужність електричного двигуна визначається за формулою
де F г – зусилля, яке прикладене до гвинта; V г – швидкість осьового переміщення гвинта; ηч, ηг – ККД черв’ячної та гвинтової пари відповідно. За результатами оцінки розрахункової потужності двигуна підбирається тип електродвигуна (табл. 20.2).
Таблиця 20.2 Трьохфазні асинхронні, короткозамкнуті
Знаючи висоту підйому Н, час підйому Т та крок різьби t знаходять частоту обертання гвинта
та необхідне передаточне число редуктора
uр = n ед / n гв. (20.8)
Редуктор може бути як черв’ячний, так і шестерний. Краще прийняти черв’ячний, бо він забезпечує додаткове самогальмування.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-06-19; просмотров: 316; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.188.188.152 (0.009 с.) |

 , (20.6)
, (20.6) , об/хв, (20.7)
, об/хв, (20.7)


