Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Тема № 3 . «Воздушная навигация с использованием бортовых автономных средств».Содержание книги
Поиск на нашем сайте
Лекция № 2.
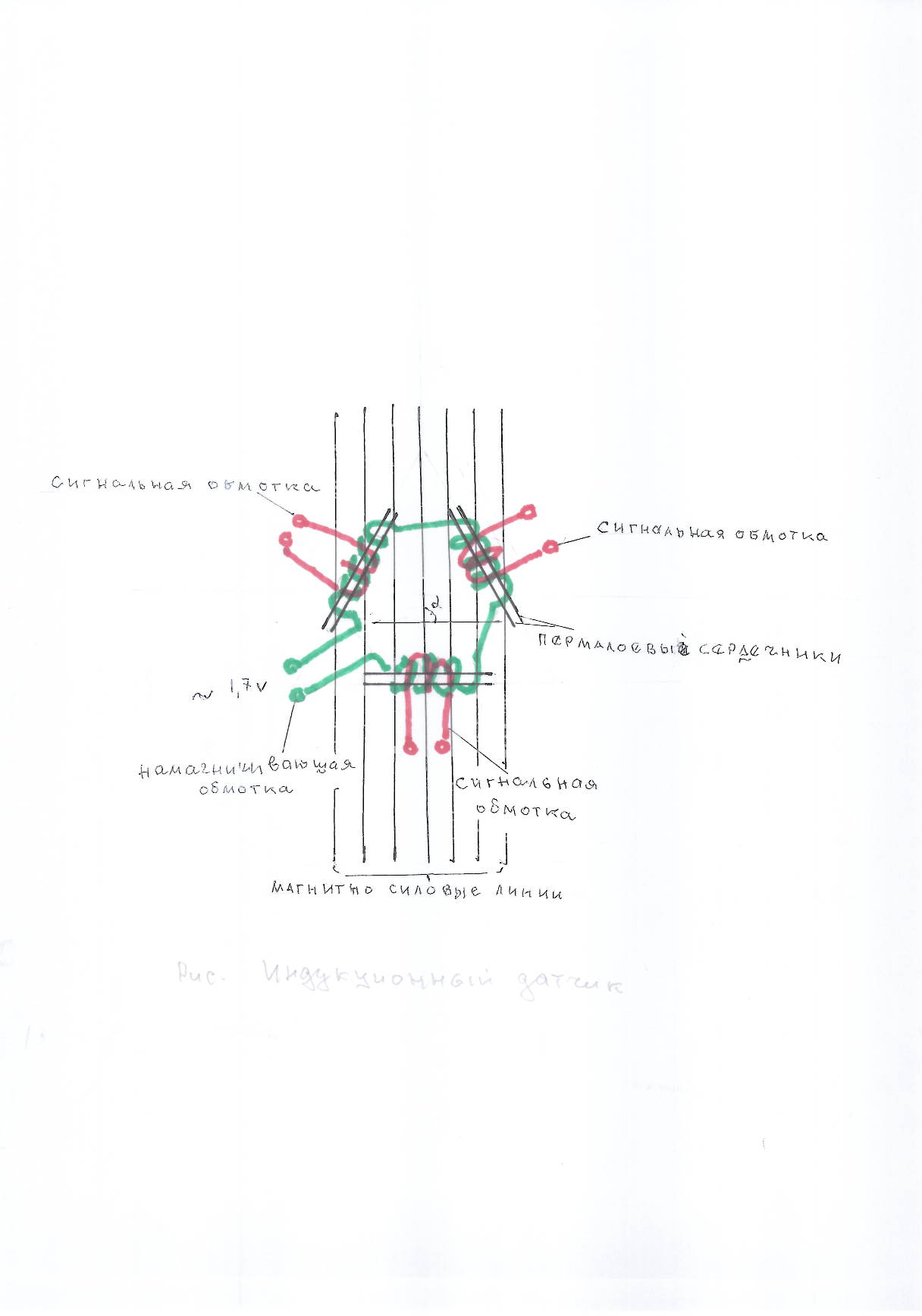
Индукционный датчик «ИД» Представляет собой три магнитных зонда расположенных под углом 120º (в виде равностороннего треугольника). Каждый магнитный зонд состоит из двух пермалоевых сердечников, на которых намотаны две обмотки: сигнальная и намагничивающая. Намагничивающая обмотка питается переменным током частотой 400 Гц и напряжением 1,7в. Сигнальные обмотки соединены треугольником и электрически со статорными обмотками указателей курса.
Индукционный датчик
Принцип работы индукционного датчика заключается в следующем: при развороте датчика на угол «α» относительно плоскости магнитного меридиана магнитное поле земли создает в пермалоевых сердечниках магнитных зондов магнитный поток величина которого пропорциональна углу «α». За счет подачи на сердечники магнитного зонда переменного тока намагничивающей обмоткой, постоянный магнитный поток преобразуется в импульсный и по закону индукции в сигнальных обмотках образуется ЕДС. Величина ЕДС в сигнальных обмотках будет пропорционально углу пересечения магнитных силовых линий «α». Каждая сигнальная обмотка соединена электрически со статорными обмотками указателя курса, ротор которого связан со стрелкой указателя курса. Чувствительный элемент расположен в металлическом котелке, который расположен в удобном месте воздушного судна. На корпусе индукционного датчика расположен девиационный прибор для компенсации девиации.
Коррекционный механизм «КМ». Предназначен для электрической связи индукционного датчика с гироагрегатом, а также для устранения девиации (четвертной) остаточной и инструментальных ошибок. Гироагрегат «Г». Предназначен для усреднения и «заполнения» показаний магнитного курса, снимаемого с индукционного датчика, а также для определения углов возврата воздушного судна. Принцип действия основан на свойстве гироскопа с тремя степенями свободы. В качестве гироскопа использован гиродвигатель с частотой вращения 22 тысячи об/мин. Усилитель «УС» Предназначен для усиления сигналов рассогласования следящих систем. Указатели «УК» Предназначены для считывания значений курса или угла разворота. Представляет собой сельсин на роторе которого укреплена стрелка либо шкала курсов. Шкала разбита на 360º с ценой деления 2º. На указателе курсов имеется задатчик курсов.
Кнопка согласования «К». Предназначена для ускоренного согласования показаний с положением индукционного датчика. Пользуются кнопкой после разворота воздушного судна. Без включенной кнопки скорость согласования составляет 1º - 5º в секунду, а при включенной кнопки - 10º в секунду. В целом работу индукционного компаса можно выразить схемой: ИД КМ Г
УС УК В сигнальных обмотках ИД наводится ЭДС пропорционально углу «Х» (курсу), которая подается на «КМ» щетки которого (потенциометра) повернутся в соответствие курса. Сигнал с «КМ» усиленный «УС» подается на гироагрегат «Г», ось которого устанавливается на значении курса с гироагрегата, также на «УК» подается осредненный курс, учитывая, что с помощью коррекционного механизма уничтожена как остаточная девиация, так и инструментальная ошибка, компас показывает магнитный курс, что избавляет летнаба от определенных расчетов. Пользование компасом. а) Предварительный осмотр и проверка. Ø убедиться, что нет видимых механических повреждений; Ø включить питание; Ø через 2 -3 минуты нажать на кнопку согласования и согласовать компас; Ø снять показания курса и сверить его с показаниями совмещенного магнитного компаса типа «КИ». Разница не должна превышать ±3º. б) Пользование компасом. Ø за 5-6 минут до выруливания включить компас; Ø согласовать компас перед взлетом; Ø после взлета считывать показания курса; Ø после выполнения эволюций воздушным судном согласовать компас.
|
|||||
|
|
Последнее изменение этой страницы: 2020-12-09; просмотров: 180; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.15.1.23 (0.005 с.) |