
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Обмеження моменту електроприводаСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Робота багатьох виробничих механізмів зв’язана з обмеженням динамічного моменту, який визначає прискорення. Прискорення са-мого електродвигуна також обмежене. Тому систему автоматичного регулювання швидкості необхідно доповнити системою обмеження моменту. Стосовно двигуна постійного струму незалежного збудже-ння систему обмеження моменту замінюють системою обмеження струму як більш просту в реалізації, бо момент двигуна пропорцій-ний струму Обмеження струму досягається затриманим від’ємним зворот-ним зв’язком за струмом, який називають «відсічкою» за струмом (рис.9.5). До контуру обмеження струму входять опір додаткових полюсів
Рис.9.5. Функціональна схема системи автоматичного регулювання швидкості з обмеженням струму якоря
Опорна напруга може створюватись окремим джерелом або стабілітроном При струмі якоря
На ділянці
де
В (9.16) два невідомі:
Рівняння (9.17) описує зміну швидкості на ділянці
Для зменшення Підставивши в (9.16) значення Напругу обмеження (напругу стабілізації стабілітрона V1) визна-чають з рівняння
Величина струму На ділянці
Підставивши в (9.20)
Якщо
Рис.9.7. Структурна схема системи регулювання швидкості з контуром обмеження струму
Після цього обчислення Результати розрахунків перевіряють моделюванням за структур-ною схемою рис.9.7. На схемі контур обмеження струму складаєть-ся з давача струму з коефіцієнтом передачі
Контрольні запитання і задачі
1. Визначити спад кутової швидкості у замкненій системі регу-лювання при номінальному навантаженні, якщо 2. Визначити коефіцієнт передачі розімкненої системи автома-тичного регулювання кутової швидкості, якщо 3. Визначити коефіцієнт зворотного зв’язку за швидкістю 4. Якими параметрами характеризується технічно-оптимальний перехідний процес? 5. Якими засобами забезпечується технічно-оптимальний процес в системі з сумуючим підсилювачем?
6. З якою метою в системах автоматичного регулювання вико-ристовують зворотні зв’язки за похідними? 7. Як впливають зворотні зв’язки за похідними на усталену по-хибку? 8. Яким способом досягається обмеження струму в системах автоматичного регулювання швидкості? 9. Яким шляхом перевіряють розрахунки параметрів систем автоматичного регулювання швидкості? 10. Чому при моделюванні диференціальну ланку замінюють послідовним з’єднанням диференціальної і інерційної ланок? Розділ 10
|
||||||
|
|
Последнее изменение этой страницы: 2017-02-21; просмотров: 522; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.227.21.101 (0.008 с.) |

 .
. , спад наруги на якому пропорційний струму якоря, давач струму ДС і опорна напруга
, спад наруги на якому пропорційний струму якоря, давач струму ДС і опорна напруга  , яка направлена проти вихідної напруги давача.
, яка направлена проти вихідної напруги давача.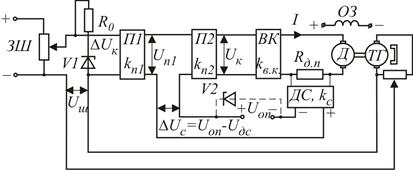
 з напругою стабілізації
з напругою стабілізації  .
. зворотний зв’язок за струмом не діє, бо
зворотний зв’язок за струмом не діє, бо  (рис.9.6). Коли струм досягне значення
(рис.9.6). Коли струм досягне значення  , то
, то  і вступає в дію від’ємний зворотний зв’язок за струмом. Напруга на вході підсилювача П2
і вступає в дію від’ємний зворотний зв’язок за струмом. Напруга на вході підсилювача П2  з подальшим збільшенням струму зменшується, що призводить до зниження швидкості від
з подальшим збільшенням струму зменшується, що призводить до зниження швидкості від  до
до  (ділянка
(ділянка  на рис.9.6).
на рис.9.6).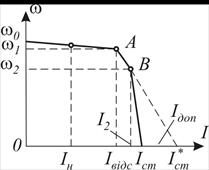 Щоби зменшити коефіцієнт підсилення підсилювача П2, при
Щоби зменшити коефіцієнт підсилення підсилювача П2, при  вводиться обмеження на вході підсилювача П1 стабілітро-ном V1 і жорсткість характерис-тики
вводиться обмеження на вході підсилювача П1 стабілітро-ном V1 і жорсткість характерис-тики  зменшується (ді-лянка
зменшується (ді-лянка  на рис.9.6).
на рис.9.6). Розрахунок контуру обмежен-ня струму зводиться до визначе-ння коефіцієнта підсилення
Розрахунок контуру обмежен-ня струму зводиться до визначе-ння коефіцієнта підсилення  , коефіцієнта передачі давача струму
, коефіцієнта передачі давача струму  і напруги стабілізації стабілітрона V1, які забезпечать бажану електромеханічну характеристику.
і напруги стабілізації стабілітрона V1, які забезпечать бажану електромеханічну характеристику. залежність
залежність  , обчислюють швидкість
, обчислюють швидкість  , при якій вступає в дію відсічка. При
, при якій вступає в дію відсічка. При  вступає в дію контур обмеження струму. Щоби знайти рівняння
вступає в дію контур обмеження струму. Щоби знайти рівняння  , потрібно в системі рівняння (9.1) рівняння
, потрібно в системі рівняння (9.1) рівняння 
 замінити двома рівняннями:
замінити двома рівняннями: (9.15)
(9.15) . Розв’язок системи (9.1) з врахуванням (9.15) дає рівняння електромеханічної характеристики при
. Розв’язок системи (9.1) з врахуванням (9.15) дає рівняння електромеханічної характеристики при  . (9.16)
. (9.16) . Тому для обчислення
. Тому для обчислення  і
і  . Тоді
. Тоді 
 і
і  . За цією умови (9.16) буде таким:
. За цією умови (9.16) буде таким: (9.17)
(9.17) . То-му, підставивши в нього
. То-му, підставивши в нього  , отримаємо рівняння для обчислення коефіцієнта
, отримаємо рівняння для обчислення коефіцієнта  . (9.18)
. (9.18) , де
, де 
 – допустимий струм двигуна за умови комутації.
– допустимий струм двигуна за умови комутації. , обчислюють швидкість
, обчислюють швидкість  , при якій вступає у дію обмеження напруги на вході підсилювача П1 (відсічка за швидкістю).
, при якій вступає у дію обмеження напруги на вході підсилювача П1 (відсічка за швидкістю). . (9.19)
. (9.19) визначає швидкість
визначає швидкість  . Це можна перевірити за рівнянням електромеханічної характеристики для
. Це можна перевірити за рівнянням електромеханічної характеристики для  .
. зворотній зв’язок за швидкістю не буде дія-ти, бо напруга на виході першого підсилювача
зворотній зв’язок за швидкістю не буде дія-ти, бо напруга на виході першого підсилювача 
 . Тому на цій ділянці рівняння
. Тому на цій ділянці рівняння  . (9.20)
. (9.20) :
: . (9.21)
. (9.21) , то згідно з (9.21) потрібно зменшити
, то згідно з (9.21) потрібно зменшити  , збільшивши
, збільшивши 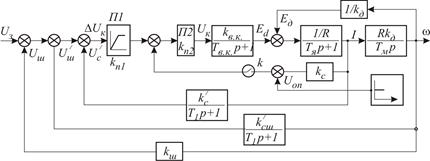
 , з (9.21) визначають
, з (9.21) визначають  . Можна забезпечити
. Можна забезпечити  , який спрацьовує при
, який спрацьовує при  ,
,  і
і  .
. ;
;  ;
;  і
і  .
. , якщо
, якщо  ;
;  і
і  .
.


