
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Формування динамічних характеристикСодержание книги
Поиск на нашем сайте
Будь-яка система автоматичного керування, крім заданої точнос-ті регулювання в усталених режимах, повинна забезпечити такі якісні показники як час регулювання, перегулювання й число коли-вань. Їх можна визначити за відомою перехідною характеристикою, яка представляє собою реакцію системи на стрибкоподібну зміну задаючого сигналу чи збурення (ударне навантаження). Система автоматичного регулювання швидкості електропривода повинна бути такою, щоби забезпечити технічно-оптимальний перехідний процес, який характеризується мінімально можливим часом регулювання Система рівнянь (9.1) описує уста-лений режим. Щоби скласти систему рівнянь, які описують динамічні процеси, необхідно рівняння (9.1) доповнити членами, що визначають кількісно зміну енергії в ланках. З врахуванням цього динаміка системи, наведеної на рис.9.1, буде описуватись наступною системою рівнянь:
де Після відповідних перетворень (9.8) отримаємо диференціальне рівняння третього порядку
де Розв’язок (9.9) при Це дуже копітка робота. Тому розроблені методи, які дозволяють за відомими коефіцієнтами лівої частини рівняння (9.9) визначити час перехідного процесу і перегулювання. Найбільше простим із відомих методів є використання діаграми Вишнеградського, з якої слідує, що технічно-оптимальний процес в системі автоматичного регулювання, яка описується диференціаль-ним рівнянням ІІІ-го порядку, буде тоді, коли коефіцієнти нормова-ною характеристикою рівняння
будуть такими: Коефіцієнти
Тому необхідно за відомими коефіцієнтами
Рис.9.4. Структурна схема системи регулювання швидкості електропривода з корегувальними ланками
При подачі на вхід сумуючого підсилювача додатково напруг зворотних зв’язків за похідними
Тому, замінивши в (9.8) перше рівняння рівнянням (9.12), одер-жимо нову систему рівнянь, спростивши яку матимемо рівняння, аналогічне (9.9), але з такими коефіцієнтами:
З (9.13) слідує, що введення зворотних зв’язків за похідними призвело лише до зміни коефіцієнтів Коефіцієнти
Зворотні зв’язки за похідними з визначеними коефіцієнтами Перевірку розрахунків слід провести моделюванням, використа-вши спеціалізований пакет МАTLAB Simulink або програму SIAM. Але реалізувати ідеальні диференціальні ланки з передавальною функцією
|
||
|
|
Последнее изменение этой страницы: 2017-02-21; просмотров: 415; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.20 (0.008 с.) |

 при перегулюванні
при перегулюванні  і числі коливань за час
і числі коливань за час  с-темі.
с-темі. ;
; ;
; ;
; ; (9.8)
; (9.8) ;
; ;
;  ;
; ,
, – стала часу керованого перетворювача, яка врахо-вує інерційність системи імпульсно-фазового керування;
– стала часу керованого перетворювача, яка врахо-вує інерційність системи імпульсно-фазового керування; 
 – стала часу якорного кола;
– стала часу якорного кола;  – індуктивність трансформатора, приведена до вторинної обмотки;
– індуктивність трансформатора, приведена до вторинної обмотки;  – індуктивність згладжуючого реактора;
– індуктивність згладжуючого реактора;  – приведений до валу двигуна момент інерції привода.
– приведений до валу двигуна момент інерції привода.
 (9.9)
(9.9) ;
;  ;
;  ;
; 
 ;
;  ;
;  ;
; 
 – електромеханічна стала часу привода.
– електромеханічна стала часу привода. є кривою перехідного процесу, зумо-вленого зміною задаючої напруги. Якщо напругу
є кривою перехідного процесу, зумо-вленого зміною задаючої напруги. Якщо напругу  стрибком змі-нити від нуля до
стрибком змі-нити від нуля до  , то розв’язком (9.9) буде
, то розв’язком (9.9) буде  – крива зміни швидкості при пуску електропривода до швидкості
– крива зміни швидкості при пуску електропривода до швидкості  . Роз-в’язок (9.9) при
. Роз-в’язок (9.9) при  і зміні моменту навантаження
і зміні моменту навантаження  представлятиме зміну швидкості, зумовлену зміною навантаження. Але ці процеси, зазвичай, не будуть технічно-оптимальними. Щоби переконатись у цьому, потрібно знайти розв’язок
представлятиме зміну швидкості, зумовлену зміною навантаження. Але ці процеси, зазвичай, не будуть технічно-оптимальними. Щоби переконатись у цьому, потрібно знайти розв’язок  (9.10)
(9.10) і
і  [7, табл.10.5].
[7, табл.10.5]. і
і  зв’язані з коефіцієнтами рівняння (9.9) фор-мулами:
зв’язані з коефіцієнтами рівняння (9.9) фор-мулами: і
і  . (9.11)
. (9.11) ,
,  ,
,  і
і  рів-няння (9.9) визначити коефіцієнти
рів-няння (9.9) визначити коефіцієнти  і
і  (рис.9.4).
(рис.9.4).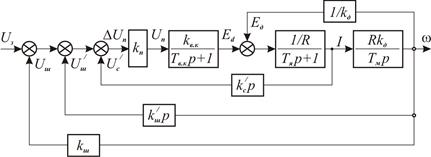
 . (9.12)
. (9.12) ;
; ;
;  ; (9.13)
; (9.13) ;
;  .
. рівняння (9.9).
рівняння (9.9).


 . (9.14)
. (9.14) в моделі не можна. Тому їх замінюють реальними диференціальними ланками з передавальними функціями
в моделі не можна. Тому їх замінюють реальними диференціальними ланками з передавальними функціями  , прийнявши
, прийнявши  , де
, де  – найменша стала часу в контурі регулювання.
– найменша стала часу в контурі регулювання.


