
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Струму незалежного збудження
Рівняння електромеханічної ха-рактеристики отримують на під-ставі умови рівноваги напруг в колі якоря:
де З (3.1) знаходимо
де
Якщо в (3.2) або в (3.3) підставити номінальні значення напруги і магнітного потоку або номінальне значення
Аналіз способів регулювання шви-дкості проводять на підставі рівняння електромеханічної характеристики. З (3.2) слідує, що регулювати швид-кість можна: Ø додатковим опором в колі яко- ря; Ø зміною напруги живлення яко- ря; Ø Регулювання швидкості вклю - ченням додаткового опору В схемі пуску двигуна додатковий опір В момент пуску (замикається ключ
Регулювання швидкості зміною напруги живлення здійснюють вниз від номінальної, бо напруга не може перевищувати номінальну. Рівняння електромеханічних характеристик при різних напругах будуть такими:
бувається при сталому моменті Зниження швидкості самовентильованих двигунів погіршує їх охолодження. Тому величина номінального струму буде зменшува-тись, що необхідно враховувати при виборі потужності двигунів. Оскільки втрати потужності в колі якоря Регулювання швидкості зміною магнітного потоку (струму збудження) здійснюють вверх від номінальної швидкості. Оскільки потужність, яку споживає обмотка збудження складає 1,2-2,5% потужності двигуна, то малою буде і потужність джерела її живлення, в якості якого використовують керовані випрямлячі (рис.3.5). Тому таке регулювання є простим і економічним. Рівняння електромеханічної характеристики
Побудовані за рівнянням (3.6) електроме-ханічні характеристики мають загальну точ-ку при
Підставивши в (3.6)
яке показує, що швидкості ідеального холостого ходу електромеха-нічних і механічних характеристик однакові, а моменти короткого замикання будуть різними, бо При цьому точки усталених режимів роботи на регулювальних ха-рактеристиках будуть розташовуватись на гіперболічній кривій.

Рис.3.6. Електромеханічні (а) і механічні (б) характеристики при зміні магнітного потоку
При зменшенні струму збудження жорсткість характеристик зменшується. Щоби забезпечити необхідну жорсткість регулюваль-них характеристик, застосовують системи автоматичної стабілізації швидкості на базі використання керованих випрямлячів або імпу-льсного параметричного регулювання струму збудження, коли до-датковий опір в колі обмотки збудження періодично шунтується (закорочується) електронним ключем зі змінною тривалістю (елект-ронний ключ з широтно-імпульсним керуванням).
|
||||||||||
|
|
Последнее изменение этой страницы: 2017-02-21; просмотров: 252; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.13.255 (0.007 с.) |
 На схемі рис.3.1. якір двигуна
На схемі рис.3.1. якір двигуна  і його обмотка збудження жив-ляться від різних джерел – перетворювачів змінного струму у пос-тійний. Способи регулювання швидкості визначають за електроме-ханічною
і його обмотка збудження жив-ляться від різних джерел – перетворювачів змінного струму у пос-тійний. Способи регулювання швидкості визначають за електроме-ханічною  чи механіч-ною
чи механіч-ною  характеристика-ми.
характеристика-ми.
 , (3.1)
, (3.1) – ЕРС, яка наводиться в обмотці якоря;
– ЕРС, яка наводиться в обмотці якоря;  – сумар-ний опір якорного кола;
– сумар-ний опір якорного кола;  – магнітний потік;
– магнітний потік;  – коефіцієнт, який залежить від конструктивних даних двигуна.
– коефіцієнт, який залежить від конструктивних даних двигуна. , (3.2)
, (3.2) – коефіцієнт передачі двигуна. Підставивши в (3.2)
– коефіцієнт передачі двигуна. Підставивши в (3.2)  , одержимо рівняння механічної характеристики
, одержимо рівняння механічної характеристики . (3.3)
. (3.3) , то одержимо рівня-ння натуральних електромеханічної чи механічної характеристик. Натуральна електромеханічна характеристика побудована за рівня-нням
, то одержимо рівня-ння натуральних електромеханічної чи механічної характеристик. Натуральна електромеханічна характеристика побудована за рівня-нням , (3.4)
, (3.4) де
де  , є прямою лінією.
, є прямою лінією. зміною магнітного потоку (струму збудження).
зміною магнітного потоку (струму збудження). в коло якоря є неекономічним, бо кори-сна потужність за умови
в коло якоря є неекономічним, бо кори-сна потужність за умови  зменшується пропорційно швидкості
зменшується пропорційно швидкості  . Різниця між потужністю, яку споживає двигун
. Різниця між потужністю, яку споживає двигун  , і корисною потужністю
, і корисною потужністю  витрачає-ться на нагрівання додаткового опору
витрачає-ться на нагрівання додаткового опору  . Тому включення додаткового опору є оправданим лише при пуску двигу-на з метою обмеження пускового струму величиною
. Тому включення додаткового опору є оправданим лише при пуску двигу-на з метою обмеження пускового струму величиною 
 .
. скла-дається із трьох секцій. Його величину вибирають з умови обмежен-ня пускового струму значенням
скла-дається із трьох секцій. Його величину вибирають з умови обмежен-ня пускового струму значенням  (рис.3.2).
(рис.3.2). , рис.3.3)
, рис.3.3)  і двигун почне розганятися. ЕРС в обмотці почне збільшуватись, що призве-де до зменшення струму. Коли він зменшиться до
і двигун почне розганятися. ЕРС в обмотці почне збільшуватись, що призве-де до зменшення струму. Коли він зменшиться до  , замикається ключ
, замикається ключ  , практично миттєво струм збільшиться до
, практично миттєво струм збільшиться до  і двигун
і двигун  продовжуватиме розгін по ха-рактеристиці
продовжуватиме розгін по ха-рактеристиці  . У точці 4 ключ
. У точці 4 ключ  закоротить опір
закоротить опір  , струм знову збільшиться до
, струм знову збільшиться до  ристики. У цій точці насту-пить усталений режим, бо
ристики. У цій точці насту-пить усталений режим, бо  .
. ;
; . (3.5)
. (3.5) З (3.5) слідує, що спади швидкості
З (3.5) слідує, що спади швидкості  не залежать від напруги. Тому характеристики
не залежать від напруги. Тому характеристики  Для двигунів з незалежною вентиляцією (з вбудованим асин-хронним приводом вентилятора) номінальний струм (момент) не залежить від напруги. Тому регу-лювання швидкості напругою від-
Для двигунів з незалежною вентиляцією (з вбудованим асин-хронним приводом вентилятора) номінальний струм (момент) не залежить від напруги. Тому регу-лювання швидкості напругою від- . При цьому спожи-вана і корисна потужності зменшуються.
. При цьому спожи-вана і корисна потужності зменшуються. незначні, то регулювання швидкості є економічним. Але при визначенні економічності роботи електропривода необхідно врахувати і втрати потужності у джерелі живлення, в якості якого використовують керовані випрямлячі і випрямлячі з широтно-імпульсним регулюванням напруги.
незначні, то регулювання швидкості є економічним. Але при визначенні економічності роботи електропривода необхідно врахувати і втрати потужності у джерелі живлення, в якості якого використовують керовані випрямлячі і випрямлячі з широтно-імпульсним регулюванням напруги. (3.6)
(3.6)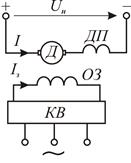 показує, що при зменшенні магнітного потоку збільшуються швид-кість ідеального холостого ходу
показує, що при зменшенні магнітного потоку збільшуються швид-кість ідеального холостого ходу  і спад швидкості
і спад швидкості  .
. , якій відповідає струм коротко-го замикання
, якій відповідає струм коротко-го замикання  .
. Оскільки допустиме навантаження двигу-на при
Оскільки допустиме навантаження двигу-на при  визначає струм якоря, то по-тужність двигуна при зміні струму збуджен-ня буде сталою
визначає струм якоря, то по-тужність двигуна при зміні струму збуджен-ня буде сталою  і рів-ною номінальній, що необхідно враховувати при виборі потужності двигуна для виробни-чого механізму.
і рів-ною номінальній, що необхідно враховувати при виборі потужності двигуна для виробни-чого механізму. , одержимо рівняння механічної характеристики у виді
, одержимо рівняння механічної характеристики у виді , (3.7)
, (3.7) (рис.3.6,б).
(рис.3.6,б).


