
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Регулювання швидкості синхронних двигунів
На відміну від асинхронних кутова швидкість синхронних двигу-нів не залежить від навантаження і визначається лише швидкістю обертання магнітного поля, створеного обмоткою статора

Рис.5.12. Принципова схема синхронного двигуна (а), механічна і пускова характеристики (б)
Здійснити пуск синхронного двигуна вмиканням обмотки стато-ра в мережу неможливо, бо сталий електромагнітний момент вини-кає лише тоді, коли магнітний потік статора і магнітний потік ротора (нерухомий відносно ротора) будуть рухатись з однаковими швидкостями (синхронно). Тому необхідно попередньо розігнати ротор до швидкості Під час розгону магнітний потік статора, рухаючись зі швидкіс-тю Щоби розігнати двигун, у пази ротора з неявновираженими по-люсами чи у полюсні наконечними укладають стержні, замкнені накоротко з торців як у роторі асинхронного двигуна. Це забезпечує асинхронний пуск синхронного двигуна (рис.5.4,б). Оскільки короткозамкнена обмотка малої потужності, то момент, що створюється, значно менший від номінального моменту. Тому пуск синхронних двигунів проводять без навантаження. Швидкість синхронного двигуна не залежить від навантаження. Щоби вияснити, які процеси виникають у двигуні зі зміною момен-ту сил опору, розглянемо векторну діаграму. Згідно другого закону Кірхгофа рівняння рівноваги напруг матиме вигляд:
де
З векторної діаграми слідує, що
де З (5.19) слідує, що при Залежність
Особливістю синхронного двигуна є те, що струм збудження можна регулювати. До чого призведе зміна струму збудження можна вияснити на підставі векторної діаграми (рис.5.15,а). При сталому моменті навантаження
Оскільки
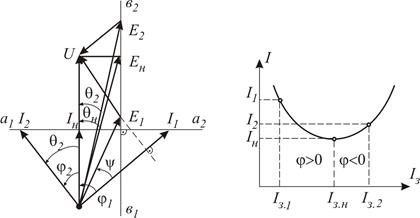
Рис.5.15. Векторні діаграми для різних струмів збудження (а) та залежність струму статора від струму збудження (в)
На рис.5.15,а побудовано векторні діаграми для трьох значень струму збудження:
Збільшивши іще струм збудження, кут Отже, змінюючи струм збудження синхронного двигуна, можна змінювати величину і фазу струмів фаз статора, що дозволяє працю-вати двигуну як з
Процеси, які протікають в синхронному двигуні при зміні часто-ти за умови Частотне керування, будучи фактично єдиним способом регулю-вання швидкості синхронних двигунів, характеризується такими же показниками, що і частотно-керовані асинхронні двигуни з коротко-замкненим ротором, але дозволяє регулювати коефіцієнт потужнос-ті, що є його основною перевагою. Додатковою перевагою є можли-вість регулювання струмом збудження максимального момента: за
|
||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-21; просмотров: 384; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.1.232 (0.009 с.) |

 . За будовою статори синхронного і асинхронного двигу-гунів однакові. Ротори їх різняться. Ротори синхронних двигунів ви-готовляють з явними полюсами
. За будовою статори синхронного і асинхронного двигу-гунів однакові. Ротори їх різняться. Ротори синхронних двигунів ви-готовляють з явними полюсами  і з неявними
і з неявними 
 . На роторі розташовують обмотку збудження, яку через кільця живлять постійним струмом (рис.5.12,а).
. На роторі розташовують обмотку збудження, яку через кільця живлять постійним струмом (рис.5.12,а). і тоді подати напругу на обмотку збудження. За рахунок інерції ротора і дії змінного електромагніт-ного моменту ротор досягне синхронної швидкості і в подальшому він буде рухатись зі швидкістю
і тоді подати напругу на обмотку збудження. За рахунок інерції ротора і дії змінного електромагніт-ного моменту ротор досягне синхронної швидкості і в подальшому він буде рухатись зі швидкістю  , оскільки поле статора і поле ротора будуть рухатись синхронно.
, оскільки поле статора і поле ротора будуть рухатись синхронно. , який повинен бути більшим за опір обмотки збудження не менше, ніж у десять разів.
, який повинен бути більшим за опір обмотки збудження не менше, ніж у десять разів. , (5.16)
, (5.16) – ЕРС, наведена полем ротора в фазній обмотці статора;
– ЕРС, наведена полем ротора в фазній обмотці статора;  ,
,  – відповідно активний і індуктивний опори фази статора.
– відповідно активний і індуктивний опори фази статора. Зазвичай опір
Зазвичай опір  . (5.17)
. (5.17) Відповідно до (5.17) на рис.5.13. зображена векторна діаграма при сталому навантаженні і сталому струмі збудження. За умови
Відповідно до (5.17) на рис.5.13. зображена векторна діаграма при сталому навантаженні і сталому струмі збудження. За умови  електромагнітна потужність
електромагнітна потужність  дорівнювати потужності, яку споживає двигун:
дорівнювати потужності, яку споживає двигун: . (5.18)
. (5.18) . З трикутника АВС
. З трикутника АВС  . Підставивши ці за-лежності в (5.18), одержимо
. Підставивши ці за-лежності в (5.18), одержимо , (5.19)
, (5.19) – струм короткого замикання.
– струм короткого замикання. момент синхронного двигуна залежить тільки від кута зсуву фаз між напругою і ЕРС, тобто від просторового кута між осями результуючого магнітного поля стато-ра і магнітного поля ротора. Зі збільшенням моменту навантаження збільшується кут
момент синхронного двигуна залежить тільки від кута зсуву фаз між напругою і ЕРС, тобто від просторового кута між осями результуючого магнітного поля стато-ра і магнітного поля ротора. Зі збільшенням моменту навантаження збільшується кут  і при
і при  досягає максимального значення
досягає максимального значення  (рис.5.14).
(рис.5.14). називається кутовою характеристикою.
називається кутовою характеристикою. Якщо момент навантаження стає біль-шим
Якщо момент навантаження стає біль-шим  , то двигун вихо-дить з синхронізму і зупиняється. Номінальному моменту двигуна відповідає
, то двигун вихо-дить з синхронізму і зупиняється. Номінальному моменту двигуна відповідає  . Відношення
. Відношення 
 визначає перевантажувальну здатність двигуна.
визначає перевантажувальну здатність двигуна. Залежність (5.19) справедлива для синхронних двигунів з неявними полюсами. У випадку явнополюсної машини виникає ще реактивний момент
Залежність (5.19) справедлива для синхронних двигунів з неявними полюсами. У випадку явнополюсної машини виникає ще реактивний момент  , показаний на рис.5.14 пунктирною лінією. Це дещо змінює синусоїдну залежність і збільшує
, показаний на рис.5.14 пунктирною лінією. Це дещо змінює синусоїдну залежність і збільшує  .
. споживана потужність також буде сталою:
споживана потужність також буде сталою: . (5.20)
. (5.20) , то і
, то і  . Це показує, що зі зміною струму збудження
. Це показує, що зі зміною струму збудження  , будуть змінюватись
, будуть змінюватись  і
і  , але добуток
, але добуток  буде сталим.
буде сталим. ,
,  і
і  , із яких видно, що
, із яких видно, що  є проекцією вектора струму
є проекцією вектора струму  на вертикальну вісь, по який відкладено вектор напруги
на вертикальну вісь, по який відкладено вектор напруги  . Оскільки
. Оскільки  . При номінальному струмі збудження кут зсуву
. При номінальному струмі збудження кут зсуву  , струм статора буде мінімальним і мінімальною буде споживача потужність, рівна
, струм статора буде мінімальним і мінімальною буде споживача потужність, рівна  (рис.5.15,б).
(рис.5.15,б). стане від’ємним і дви-гун, працюючи в режимі двигуна, буде виробляти реактивну потуж-ність і віддавати її в мережу живлення. Це підтверджує положення вектора
стане від’ємним і дви-гун, працюючи в режимі двигуна, буде виробляти реактивну потуж-ність і віддавати її в мережу живлення. Це підтверджує положення вектора  , який при збільшенні
, який при збільшенні  , бо згідно (5.19)
, бо згідно (5.19)  , а це і є проекція вектора ЕРС на горизонтальну вісь.
, а це і є проекція вектора ЕРС на горизонтальну вісь. , так і зі струмами, які випереджають напругу, тобто споживати з мережі живлення активну потужність і віддавати в мережу реактивну потужність для потреб інших споживачів, наприклад, асинхронних двигунів.
, так і зі струмами, які випереджають напругу, тобто споживати з мережі живлення активну потужність і віддавати в мережу реактивну потужність для потреб інших споживачів, наприклад, асинхронних двигунів.
 Регулювання швидкості синхронних двигунів здійснюють лише зміною частоти живлення, як вверх від основної швидкості, так і вниз. Регулювання швидкості зміною числа пар полюсів обмотки статора неможливо, бо ротор має стале число полюсів. Оскільки швидкість синхро-нного двигуна не залежить від напру-ги, то напругу змінюють лише при пуску потужних двигунів з метою обмеження пускового струму. При цьому процес пуску синхронного двигуна такий же як і асинхронного.
Регулювання швидкості синхронних двигунів здійснюють лише зміною частоти живлення, як вверх від основної швидкості, так і вниз. Регулювання швидкості зміною числа пар полюсів обмотки статора неможливо, бо ротор має стале число полюсів. Оскільки швидкість синхро-нного двигуна не залежить від напру-ги, то напругу змінюють лише при пуску потужних двигунів з метою обмеження пускового струму. При цьому процес пуску синхронного двигуна такий же як і асинхронного. , аналогічні відповідним процесам в асинхронному двигуні з короткозамкненим ротором. Тому при регулюванні швидкості співвідношення між частотою і напругою будуть такими же. Регулювання швидкості частотою є двозонним; механічні характеристики абсолютно жорсткі, діапазон регулювання практично необмежений (рис.5.16).
, аналогічні відповідним процесам в асинхронному двигуні з короткозамкненим ротором. Тому при регулюванні швидкості співвідношення між частотою і напругою будуть такими же. Регулювання швидкості частотою є двозонним; механічні характеристики абсолютно жорсткі, діапазон регулювання практично необмежений (рис.5.16). збільшення струму збудження збільшує
збільшення струму збудження збільшує 


