
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Система керування електроприводом з
Підпорядкованим регулюванням
Структурна схема системи підпорядкованого Регулювання
Недоліком системи керування електроприводом з сумуючим під-силювачем є складність формування перехідних процесів, бо керую-чий вплив на систему залежить від багатьох зворотних зв’язків. Це ускладнює їх реалізацію та налагодження роботи системи. Щоби мати можливість окремо розрахувати і налагоджувати зміни струму і швидкості, використовують систему підпорядкованого регулюван-ня.
Рис.10.1. Структурна схема системи з підпорядкованим регулюванням струму і швидкості
Система керування електроприводом з підпорядкованим регулю-ванням має два контури регулювання: внутрішній – контур регулю-вання струму якоря, і зовнішній – контур регулювання швидкості. До складу внутрішнього контуру входять регулятор струму РС, керований випрямляч ВК, якорне коло двигуна і від’ємний зв’язок за струмом з коефіцієнтом передачі Зовнішній контур складається з регулятора швидкості РШ, кон-туру регулювання струму, двигуна і зворотного зв’язку за швидкіс-тю з коефіцієнтом передачі Така побудова системи керування дозволяє окремо формувати перехідні і усталені процеси в контурах, що значно спрощує розра-хунки і налагодження системи. З теорії автоматичного керування відомо
де Щоби у контурі струму перехідний процес був технічно-оптима-льним, передавальна функція розімкненого контуру
З рис.10.1 слідує, що на струм якоря впливає ЕРС двигуна
Підставивши в (10.2) рівняння передавальних функцій, отримає-мо
Оскільки
де З теорії автоматичного керування також відомо
Вираз (10.6) отримано з (10.1) заміною З умови
де Розімкнений контур швидкості складається з регулятора швид-кості РШ, контуру струму, інтегрувальної ланки (двигуна) і зворот-ного зв’язку за швидкістю з коефіцієнтом передачі Дійсну передавальну функцію контуру струму із-за того, що
З врахуванням (10.8) передавальна функція розімкненого конту-ру швидкості
З рівності
де Тип і коефіцієнт передачі регулятора швидкості Точність регулювання в системі підпорядкованого регулювання з П-регулятором швидкості повинна бути
Дійсний номінальний спад швидкості в системі з П-регулятором, як наведено в
З (10.12) слідує, що спад швидкості залежить тільки від сталих часу
Для визначення параметрів ПІ-регулятора швидкості бажа-ну передавальну функцію розімкненого контуру приймають у виді
З рівності виразів (10.13) і (10.9) знаходять передавальну функ-цію регулятора швидкості
де При такому ПІ-регуляторі перерегулювання складе 0,43, а час регулювання
Фільтр сповільнить перехідний процес, але час регулювання збі-льшиться до
|
||||||
|
|
Последнее изменение этой страницы: 2017-02-21; просмотров: 364; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.140.186.241 (0.008 с.) |

 . На вході цього контуру (вхід РС) порівнюється напруга виходу регулятора швидкості РШ
. На вході цього контуру (вхід РС) порівнюється напруга виходу регулятора швидкості РШ  з напругою зворотного зв’язку за струмом
з напругою зворотного зв’язку за струмом  . Їх різниця
. Їх різниця  визначає величину струму в контурі і забезпечує його стабілізацію.
визначає величину струму в контурі і забезпечує його стабілізацію. . Вхідним сигналом для контуру швидкості може бути безпосередньо задаючий сигнал
. Вхідним сигналом для контуру швидкості може бути безпосередньо задаючий сигнал  або сиг-нал з задавача інтенсивності ЗІ. Різниця сигналів
або сиг-нал з задавача інтенсивності ЗІ. Різниця сигналів  є керуючим впливом і забезпечує стабілізацію швидкості шляхом ре-гулювання струму якоря, який пропорційний моменту навантажен-ня.
є керуючим впливом і забезпечує стабілізацію швидкості шляхом ре-гулювання струму якоря, який пропорційний моменту навантажен-ня. , що в системі, яка описується диференціальним рівнянням другого порядку, перехід-ний процес буде технічно-оптимальним, якщо передавальна функ-ція розімкненої системи буде мати такий вид:
, що в системі, яка описується диференціальним рівнянням другого порядку, перехід-ний процес буде технічно-оптимальним, якщо передавальна функ-ція розімкненої системи буде мати такий вид: , (10.1)
, (10.1) – найменша стала часу контуру. Передавальній функції (10.1) відповідає час регулювання
– найменша стала часу контуру. Передавальній функції (10.1) відповідає час регулювання  і перерегулювання
і перерегулювання 
 .
. повин-на бути рівною бажаній передавальній функції
повин-на бути рівною бажаній передавальній функції  , тобто
, тобто . (10.2)
. (10.2) . Але цей вплив незначний, бо стала часу якорного кола
. Але цей вплив незначний, бо стала часу якорного кола  значно менша електромеханічної сталої часу двигуна
значно менша електромеханічної сталої часу двигуна  . Тому з метою спрощення розрахунків впливом ЕРС нехтують. Тоді передавальна функція розімкненого контуру струму
. Тому з метою спрощення розрахунків впливом ЕРС нехтують. Тоді передавальна функція розімкненого контуру струму . (10.3)
. (10.3) . (10.4)
. (10.4) , то приймаємо
, то приймаємо  . За цієї умови пе-редавальна функція регулятора дорівнюватиме
. За цієї умови пе-редавальна функція регулятора дорівнюватиме , (10.5)
, (10.5) – пропорційна складова ПІ – регулято-ра струму.
– пропорційна складова ПІ – регулято-ра струму. . (10.6)
. (10.6) .
. , (10.7)
, (10.7) – передавальна функція розімкненого контуру швидко-сті, визначають передавальну функцію регулятора швидкості.
– передавальна функція розімкненого контуру швидко-сті, визначають передавальну функцію регулятора швидкості. . (10.8)
. (10.8) . (10.9)
. (10.9) визначають передава-льну функцію регулятора швидкості:
визначають передава-льну функцію регулятора швидкості: , (10.10)
, (10.10) – коефіцієнт передачі П – регулятора швидкості.
– коефіцієнт передачі П – регулятора швидкості. (фор-мула 9.3). Звідси спад швидкості при номінальному навантаженні
(фор-мула 9.3). Звідси спад швидкості при номінальному навантаженні . (10.11)
. (10.11)
 . (10. 12)
. (10. 12) і
і 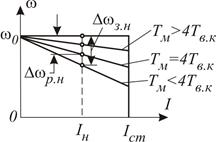
 Якщо
Якщо  , то система з П-регулятором швидкості забезпечить необхідну точність і діапазон регулювання. У випадку
, то система з П-регулятором швидкості забезпечить необхідну точність і діапазон регулювання. У випадку  точність регулювання буде меншою від необхідної
точність регулювання буде меншою від необхідної  і необхідно замість П-регулятора швидкості вибрати ПІ-регулятор. Тоді система стане астатичною і
і необхідно замість П-регулятора швидкості вибрати ПІ-регулятор. Тоді система стане астатичною і  (горизонтальна пряма на рис.10.2).
(горизонтальна пряма на рис.10.2). . (10.13)
. (10.13) , (10.14)
, (10.14) – пропорційна складова ПІ-регулятора, яка є рівною коефіцієнту передачі П-регулятора.
– пропорційна складова ПІ-регулятора, яка є рівною коефіцієнту передачі П-регулятора. . Зменшити перерегулювання до 0,062, що відповідає технічно-оптимальному процесу, можна введенням на вхід регулятора інерційної ланки (фільтра) з передавальною фун-кцією
. Зменшити перерегулювання до 0,062, що відповідає технічно-оптимальному процесу, можна введенням на вхід регулятора інерційної ланки (фільтра) з передавальною фун-кцією . (10.15)
. (10.15) . За стрибкоподібного вхідного сигналу швидкість двигуна досягне усталеного значення за
. За стрибкоподібного вхідного сигналу швидкість двигуна досягне усталеного значення за 


