
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Електроприводів постійного струму
З сумуючим підсилювачем
Загальні положення
Регулювання кутової швидкості двигуна постійного струму неза-лежного збудження в широкому діапазоні забезпечується системою регулювання зі зворотним зв’язком за швидкістю (рис.9.1).
Рис.9.1. Функціональна схема системи регулювання швидкості електропривода
Вона складається з задавача швидкості ЗШ, підсилювача сумую-чого ПС, на вхід якого надається різниця задаючої напруги Діапазон регулювання залежить від жорсткості механічної харак-теристики: чим жорсткість більша, тим більший діапазон регулюва-ння. Модуль жорсткості механічної характеристики розімкненої системи електропривода В замкненій системі керування модуль жорсткості Вихідними даними для розрахунку параметрів системи автома-тичного регулювання в устале-ному режимі є діапазон Завданням розрахунків є визначення таких значень коефіцієнта підсилення підсилювача
де
де Підставивши в (9.2) Порядок розрахунку коефіцієнтів Ø за заданими Д і
Ø обчислюють спад швидкості в розімкненій системі при
Ø із відношення
Ø обчислюють коефіцієнт зворотного зв’язку за формулою
яка слідує з того, що при Ø за характеристикою на рис.4.9,а визначають коефіцієнт передачі керованого випрямляча Ø коефіцієнт підсилення підсилювача
Визначені за наведеними формулами Для перевірки розрахунків слід побудувати електромеханічні характеристики при У випадку невеликого діапазону регулювання
|
|||||
|
|
Последнее изменение этой страницы: 2017-02-21; просмотров: 274; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.15.1 (0.01 с.) |
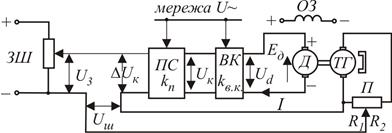
 і напруги зворотного зв’язку
і напруги зворотного зв’язку  , перетворювача змінної напруги у регульовану постійну, в якості якого використовується випрямляч керований ВК або імпульсний перетворювач, двигуна Д і тахогенератора ТГ, за допомогою якого здійснюється зворотний зв’язок.
, перетворювача змінної напруги у регульовану постійну, в якості якого використовується випрямляч керований ВК або імпульсний перетворювач, двигуна Д і тахогенератора ТГ, за допомогою якого здійснюється зворотний зв’язок. невеликий (рис.9.2, пряма 1).
невеликий (рис.9.2, пряма 1).
 можна змінювати в залежності від потреб технологіч-ного процесу: точності і діапазону регулювання (рис.9.2, пряма 2). Це зумовлене тим, що при зміні швидкості двигуна із-за будь-яких причин (зміна навантаження, температурні випливи тощо) відповід-но змінюється керуючий вплив
можна змінювати в залежності від потреб технологіч-ного процесу: точності і діапазону регулювання (рис.9.2, пряма 2). Це зумовлене тим, що при зміні швидкості двигуна із-за будь-яких причин (зміна навантаження, температурні випливи тощо) відповід-но змінюється керуючий вплив  (рис.9.1), який нап-равлений на компенсацію цього впливу, тобто діє принцип „регулю-вання за відхиленням”.
(рис.9.1), який нап-равлений на компенсацію цього впливу, тобто діє принцип „регулю-вання за відхиленням”.
 і точність регу-лювання
і точність регу-лювання  , а також параметри силової час-тини електропривода: коефі-цієнт передачі керованого вип-рямляча
, а також параметри силової час-тини електропривода: коефі-цієнт передачі керованого вип-рямляча  і параметри дви-гуна
і параметри дви-гуна  і
і  .
. і коефіцієнта зворотного зв’язку за швидкістю
і коефіцієнта зворотного зв’язку за швидкістю  , які б забезпечили задані значен-ня Д і
, які б забезпечили задані значен-ня Д і  . Для цього потрібно знати рівняння механічної або елект-ромеханічної характеристики електропривода у замкненій системи регулювання, яке знаходять, розв’язавши наступну систему рівнянь:
. Для цього потрібно знати рівняння механічної або елект-ромеханічної характеристики електропривода у замкненій системи регулювання, яке знаходять, розв’язавши наступну систему рівнянь: ;
; ;
; ; (9.1)
; (9.1) ;
; ,
,  ,
, – коефіцієнт зворотного зв’язку за шви-дкістю;
– коефіцієнт зворотного зв’язку за шви-дкістю;  – коефіцієнт передачі тахогенерато-ра;
– коефіцієнт передачі тахогенерато-ра;  – випрямлена ЕРС;
– випрямлена ЕРС;  – еквівалентний опір керованого пе-ретворювача. Розв’язком (9.1) є рівняння електромеханічної харак-теристики
– еквівалентний опір керованого пе-ретворювача. Розв’язком (9.1) є рівняння електромеханічної харак-теристики , (9.2)
, (9.2) – коефіцієнт передачі розімкненої системи;
– коефіцієнт передачі розімкненої системи;  – сумарний опір кола якоря;
– сумарний опір кола якоря;  , одержимо механічну характерис-тику.
, одержимо механічну характерис-тику. такий:
такий: ; (9.3)
; (9.3)
 ; (9.4)
; (9.4) визначають
визначають  :
: ; (9.5)
; (9.5) , (9.6)
, (9.6)

 . Зазвичай приймають задаючу напругу стандартного:
. Зазвичай приймають задаючу напругу стандартного:  ;
; ;
; . (9.7)
. (9.7) і
і  (рис.9.2) і по них визначити Д і
(рис.9.2) і по них визначити Д і  замість оберненого зв’язку за швидкістю використовують зворотний зв’я-зок за ЕРС двигуна, яку вимірюють тахометричним мостом. Для отримання розрахункових формул потрібно лише замінити коефі-цієнт
замість оберненого зв’язку за швидкістю використовують зворотний зв’я-зок за ЕРС двигуна, яку вимірюють тахометричним мостом. Для отримання розрахункових формул потрібно лише замінити коефі-цієнт  , де
, де  – коефіцієнт зворотного зв’язку за ЕРС
– коефіцієнт зворотного зв’язку за ЕРС  . В
. В 


