Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
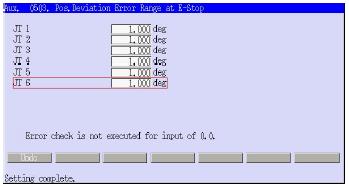
A-0503 pos. Deviation error range at e-stopСодержание книги
Поиск на нашем сайте Эта функция устанавливает допустимый диапазон отклонения позиции для проверки позиции ошибок, когда силовое питание привода включается после аварийного останова.
Диапазон отклонения при аварийном останове = существующее положение при рестарте – командная позиция при последнем, аварийном останове.
Диапазон ошибки может быть установлен для каждого сустава. Если введен 0.000, проверка ошибки не выполняется. Заметьте, что установка слишком маленького значения может привести к ошибке даже при нормальных состояниях, при запуске после аварийного останова. Назначение этой функции состоит в том, чтобы препятствовать столкновениям робота с периферийным оборудованием, когда происходит перезапуск после аварийного останова.
1. Передвинуть курсор на каждый пункт [JT] и ввести необходимые числовые данные. Если установка корректна, нажать ввод.
2. Когда появляется надпись “Setting complete”, установка завершена.
A-0504 ENCODER VALUE ERROR RANGE AT POWER ON Эта функция устанавливает различие значения энкодера, которое будет рассматриваться как ошибка отклонения, когда значения энкодера сравниваются при включении и выключении силового питания.
Различие значения энкодера = [значение энкодера при включении силового питания] – [значение энкодера, когда последний раз силовое питание было выключено]
Диапазон ошибки может быть установлен для каждого сустава. Заметьте, что установка слишком маленького значения может привести к ошибке даже в нормальных условиях, когда система работает в пределах проектных показателей технических условий.
1.Передвинуть курсор на каждый пункт [JT] и ввести необходимые числовые данные. Если установка корректна, нажать ввод.
2.Когда появляется надпись “Setting complete”, установка завершена.
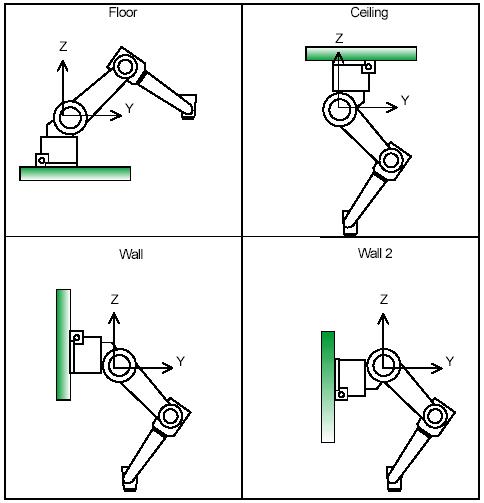
A-0505 ROBOT INSTALLATION POSTURE Направление +Z базовой системы координат может быть установлено перпендикулярно вверх в течение обучения, как только фактическое положение сделано так, чтобы соответствовать положению, установленному в контроллере. Направление базовых координат робота при установке показано на рисунке ниже. Однако значение базовых координат O, A, T должны быть установлены в 0 в А-0506.
1.Установить курсор в необходимое окно и нажать ввод.
A-0506 BASE COORDINATES (аналогично инструкции BASE в AS программировании)
Эта функция переопределяет базовую систему координат.
1. Переместить курсор в каждый пункт и ввести требуемые числовые данные. 2. Если установка корректна, нажать ввод.
3. Когда появится надпись “Setting complete”, установка произведена.
A-0507 MOTION LIMIT (аналогично командам ULIMIT, LLIMIT AS программирования) Эта функция устанавливает верхний, нижний пределы диапазона движения для всех суставов в программном обеспечении.
Пределы диапазона движения эффективны только в программном обеспечении. Безопасность не может быть обеспечена, если используются только программно обеспеченные пределы для ограничения движения. Эти значения установлены на максимальный диапазон для робота при отгрузке, если заранее не оговорено другое. 1. Переместить курсор в каждый пункт [JT] и ввести требуемые числовые данные. Если установка корректна, нажать ввод.
A-0508 SLOW REPEAT Эта функция устанавливает медленную скорость автоматического режима, как процент от максимальной скорости автоматического режима.
1. Ввести требуемые числовые данные. Максимальный диапазон (1 – 25 %) Если установка корректна, нажать ввод.
A-0509 INTERFACE PANEL Эта функция позволяет установку девяти различных видов переключателей, лампочек и т.д. для использования на интерфейсной панели дисплея пульта ручного управления. Типы элементов и их расположение для отображения могут быть организованы свободно внутри допустимого установочного диапазона.
|
|||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-06-06; просмотров: 290; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.33 (0.007 с.) |