Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Список дополнительных функцийСодержание книги
Поиск на нашем сайте
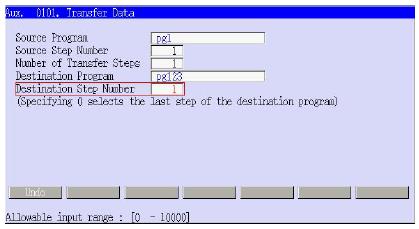
A-0101 TRANSFER DATA Эта функция позволяет пользователю перемещать программные шаги (шаг) между программами или в другой шаг в пределах самой программы.
2.Введите требуемые данные и нажмите
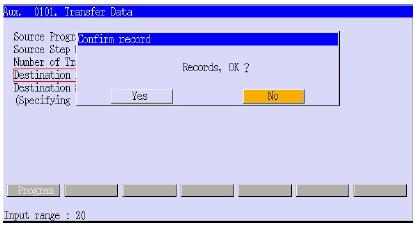
3.Отобразится подтверждающий блок. Если все нормально, переведите курсор на <Yes> и нажмите SELECT.
4.Когда появится надпись “Copy completed”, установка произведена.
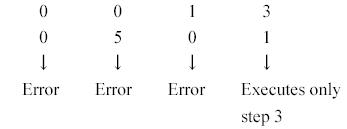
(ПРИМЕЧАНИЕ) Когда количество шагов для переноса задано 0, происходит ошибка. Когда 0 задается для первого шага переноса, происходит ошибка. Когда количество шагов больше чем последний шаг программы назначения, перенос выполняется до последнего шага.
Пример
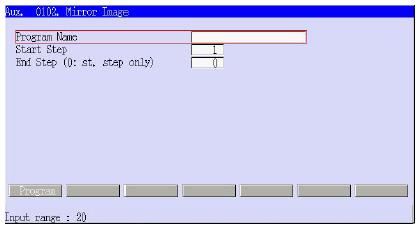
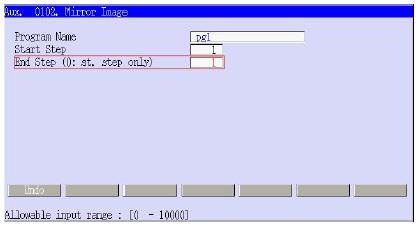
A-0102 MIRROR IMAGE Эта функция преобразует обученные позиции в зеркальное, симметричное отражение относительно плоскости YZ робота. Поэтому возможно создать симметричные позиции без обучения, если положение деталей зеркально симметричны относительно YZ плоскости.
1. Нажмите <Program> и выберите имя программы. Затем нажмите
2.Введите требуемые данные и нажмите
3.Отобразится подтверждающий блок. Если все нормально, переведите курсор на <Yes> и нажмите SELECT.
4.Когда появится надпись “Copy completed”, установка произведена.
(ПРИМЕЧАНИЕ) Когда последний шаг задается 0, только первый шаг обрабатывается. Когда 0 присваивается для первого шага, происходит ошибка.
Когда количество шагов больше чем последний шаг программы назначения, перенос выполняется до последнего шага.
Пример
Эта функция действительна только для позиций, обученных в блочном программировании. Точки, обученные в AS программировании, не могут быть преобразованы.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-06-06; просмотров: 192; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.139.235.52 (0.009 с.) |









 .
.