Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
A-0305 fixed Tool coordinates (опция)Содержание книги
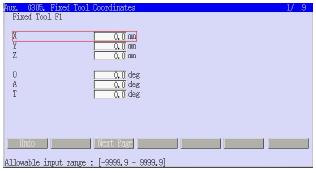
Поиск на нашем сайте Эта функция задает фиксированные инструментальные координаты, когда инструмент прикреплен не к фланцу робота, а в какой-то фиксированной точке (стационарный инструмент), робот держит деталь и движется по определенной траектории около неподвижного инструмента. До девяти фиксированных координат инструмента может быть установлено. Фиксированные координаты инструмента устанавливаются значениями преобразования (декартовыми координатами), которые отображают
положение инструмента в пространстве относительно начала базовой системы координат.
1. Переместить курсор в каждый пункт и ввести требуемые числовые данные. Когда используются несколько инструментов, нажать <Next Page> для перехода на следующую страницу и ввода данных инструмента.
2. После ввода всех данных нажать ввод.
3. Появление надписи “Setting complete” указывает на завершение операции.
(ПРИМЕЧАНИЕ) Установка предусматривает девять страниц. Все данные в этих страницах регистрируются одновременно. Если устанавливаются только X, Y, Z, а O, A, T нулевые значения, фиксированные координаты инструмента будут иметь параллельное положение в пространстве и будут повернуты как базовые координаты.
A-0306 WORK COORDINATES (опция) Эта функция определяет координаты детали (1-9), которые привязаны к детали относительно базовых координат робота.
1. Переместить курсор в каждый пункт и ввести требуемые числовые данные. Когда используются несколько деталей, нажать <Next Page> для перехода на следующую страницу и ввода данных деталей.
2.После ввода всех данных нажать ввод.
3. Появление надписи “Setting complete” указывает на завершение операции.
(ПРИМЕЧАНИЕ) Установка включает девять страниц. Нажатие
A-0401 TEACH/CHECK SPEED Эта функция устанавливает медленную, среднюю, высокую скорости для обучающего или проверочного режимов посредством скорости 1, 2, 3. Расстояние одного перемещения также задается этой функцией. Допустимый диапазон для скоростей 0.1 – 250.0 мм/с, для одного перемещения 0.000 – 1.000 мм.
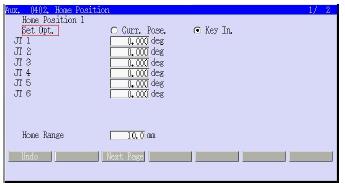
A-0402 HOME POSITION (аналогично SETHOME, SET2HOME в AS программировании) Эта функция устанавливает две позиции безопасности для действий робота. Эти позиции полезны, когда используются - возвращение робота в заданную позицию безопасности, используя инструкцию HOME AS программирования; - внешний выходной сигнал указывает, что робот достиг установленную позицию безопасности.
1. Передвинуть курсор в каждый пункт [JT] и ввести данные Home Position 1 числовыми значениями. Принять текущую позицию как позицию безопасности и нажать ввод.
2. Для того чтобы использовать Home Position 2, нажать <Next Page> для перехода на следующую позицию и ввода требуемых данных. Если установка корректна, нажать ввод.
(ПРИМЕЧАНИЕ) Диапазон безопасности должен быть установлен между 5 и 10 миллиметрами, чтобы гарантировать, что выходной сигнал позиции безопасности произведен.
|
||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-06-06; просмотров: 233; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.33 (0.007 с.) |



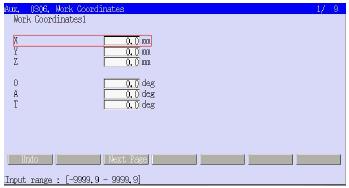

 один раз запишет все данные, содержащихся на страницах.
один раз запишет все данные, содержащихся на страницах.