
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
A-0208 set verifying functionСодержание книги
Поиск на нашем сайте
При копировании, сохранении или загрузке данных в робот или на внешний носитель, контролирующая функция, для подтверждения того, что данные были переданы правильно, может быть разрешена или запрещена. Разрешение этой функции (установочный эффект) удлиняет время обработки
1. Переместите курсор в Enable или Disable для каждого внешнего устройства памяти. Если дисковод не установлен, как опция, он не отображается. 2. Нажмите SELECT и выберите желательный пункт.
3. После того как обе установки завершены, нажмите ↵. Отобразится подтверждение “Normally completed.”
A-0209 SET DEFAULT DEVICE Когда дисковод установлен, есть возможность установить какой носитель памяти будет по умолчанию.
A-0301 SPEED Эта функция устанавливает скорость на уровнях 0 – 9 для использования в блочном программировании. Все данные скорости задаются в процентах от максимальной скорости (0 – 100%).
Для углового перемещения: % от максимальной скорости для каждого сустава.
Для линейного, кругового перемещения: % от максимальной интерполированной скорости.
Обратитесь к руководству Монтаж и подключение = Манипулятор для понимания максимальной скорости для каждой оси и интерполяции.
1.Ввести в каждый пункт данные скорости. Если установка корректна, нажать ввод.
A-0302 ACCURACY Эта функция устанавливает данные точности (1 – 4), используемые в блочном программировании.
1. Ввести в каждый пункт данные точности. Если установка корректна, нажать ввод. Допустимые границы 0.0 – 9999.9 мм.
(ПРИМЕЧАНИЕ) 1. Установка диапазона точности очень маленьким, может привести к останову робота из-за ошибки несовпадения осей. Устанавливайте значение больше чем точность, установленная для точности повторения. Однако, несовпадение осей может по-прежнему случиться, даже если значение при обучении больше, чем значение повторения, т.к. точность, установленная здесь есть отклонение между обучающим и автоматическим режимами, которые могут изменяться в зависимости от конкретного робота и условий нагрузки. 2. Заметьте, что условия ожидания имеют приоритет над установкой точности в определенном движении робота. Если ожидаются условия (таймер, WS и т.д.), обученные в точке B (сл.страница) и ожидание выполнения состояний не удовлетворено, робот движется до точки B, даже если диапазон точности широкий (500 мм для примера)
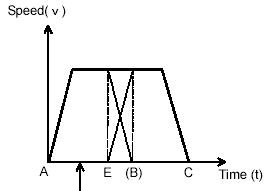
Точность и траектория Тип движения 1 (CP ON) Как только текущее значение позиции попадает в диапазон точности (т.е. робот достигает точки D), наложение начинается от значений текущего движения со значением команды движения для следующей траектории. Робот будет перемещаться непрерывно по направлению следующей траектории в соответствии с командными значениями.
Чем больше диапазон, определяющий точность, тем раньше начинается наложение. Однако ускорение для следующей траектории не начинается раньше точки, где робот начинает замедление (точка E), следовательно можно говорить, что эффект точности достигается в определенной величине, т.е. нет эффекта в установке значений точности большем, чем расстояние между B и E.
Даже, если командная величина достигает точки точности в это время, ускорение для следующей траектории не может начаться до замедления, начинающегося в точке E.
Если значения ускорения и замедления установлены достаточно маленькими, наложение начинается раньше, и робот движется по траектории с большим радиусом, но общее время для достижения точки C отличается незначительно.
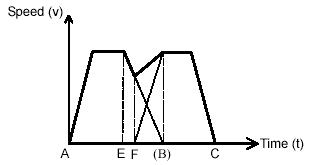
Даже если замедление уменьшено, а ускорение для следующей траектории увеличено, совместная скорость не будет превышать определенную максимальную скорость, т.к. наложение не начнется до достижения роботом точки F (точки, где начинается ускорение). Иными словами, время для того, чтобы выполнить полностью замедление и ускорение одно и тоже (точка B).
Тип движения 2
В типе движения 2, понятие ускорения и скорости в линейном движении и круговом движении отличаются от стандартного типа движения. Стандартный тип движения и тип движения 2 могут использоваться в одинаковых программах без изменений, но реальная траектория движения и скорость движения будут меняться.
1.Установка точности Точность в угловом интерполированном движении Траектория движения робота, соответствующая установленной точности, показана на рисунке, изображенном ниже. В примере значения точности в точке В - 1 мм, 100 мм, 200 мм. Тем же самым способом, как стандартное движение, робот начинает движение по кратчайшему расстоянию до достижения точки В, но не обязательно начинает разворот в точке, где он входит в диапазон точности. Как близко робот подойдет к точке В до начала разворота, определяется при помощи угла каждой оси, вычисленного пропорционально значению точности. При установке значения точности достаточно большим, робот может пройти по кратчайшей траектории кратчайшим расстоянием либо оставшееся расстояние текущей траектории, либо половину расстояния следующей траектории от В до С.
2.Точность линейного и кругового интерполированного движения Траектория движения робота, соответствующая установленной точности, показана на рисунке, изображенном ниже. В примере значение точности в точке В – 1 мм, 100 мм, 200 мм. Робот начинает разворот в точке, где он вошел в диапазон точности. Робот движется по круговой траектории внутри радиуса диапазона точности. При установке значения точности достаточно большим, робот может пройти по кратчайшей траектории кратчайшим расстоянием либо оставшееся расстояние текущей траектории, либо половину расстояния следующей траектории от В до С.
Величина точности может быть установлена равной половине расстояния второй траектории.
При движении по кратчайшему пути, время цикла может быть уменьшено. Тем не менее, когда следующие состояния установлены, обработка установки точности будет такой же, как и в стандартном движении: - когда инструкции ожидания выполняются в точке В; - когда work/tool изменяются в точке В; - когда режим интерполяции меняется на посуставную интерполяцию; - когда модель движения изменяется в точке В (обычная модель
2.Установка скорости Скорость интерполированного движения суставов Такая же, как в стандартном типе движения.
Скорость в линейном и круговом интерполированном движении В типе движения 2, если значение точности установлено большим и конфигурация робота не изменяется между двух позиций, заданная скорость достигается, даже если расстояние между двумя позициями мало.
Тем не менее, когда следующие состояния установлены, обработка установки точности будет такой же, как и в стандартном движении: - когда инструкции ожидания выполняются в точке В; - когда work/tool изменяются в точке В; - когда режим интерполяции меняется на суставную интерполяцию; - когда модель движения изменяется в точке В, из обычного режима (деталь фиксирована, инструмент движется) в режим фиксированных инструментальных размеров.
3. Скорость при круговой интерполяции
Примечание При попытке выполнить программу, где изменение положения робота происходит в пределах короткого расстояния, время для осуществления изменения положения будет превышать расчетное время для прохождения этого расстояния с заданной скоростью. В этом случае отдается приоритет движению в суставах (угловому движению), соответственно изменение позиции не может быть осуществлено с заданной скоростью.
В типе движения 2 максимальная скорость автоматически устанавливается соответственно способности робота выполнить характерное круговое интерполированное движение. Робот следует круговой траектории внутри окружности диапазона точности. Максимальная скорость прохождения этой траектории также устанавливается возможностями робота.
A-0303 TIMER Эта функция устанавливает время ожидания (для таймеров 1-9), используемое в блочном программировании.
Ввести данные таймера в числовом виде. Если установка корректна, нажать ввод (допустимый диапазон 0.0 – 1000.0 секунд).
A-0304 TOOL COORDINATES Эта функция регистрирует данные (вплоть до 9) отдельных инструментальных систем координат, используемых в блочном программировании. Эти данные включают в себя размеры смещения начала инструментальной системы координат в направлениях осей X, Y, Z, измеренные от начала исходной инструментальной системы координат, расположенного в центре фланца, углов вращения координатной системы, массы инструмента, центра тяжести и инерционного момента. Робот работает, основываясь на размерах инструмента, изменяя положение инструментальной системы координат, соответственно траекторию движения. Инерционный момент вводится только тогда, когда эффективна функция обнаружения столкновения.
Убедитесь, что регистрация массы и центра гравитации осуществлена корректно. Регистрация неправильного значения может привести к уменьшению срока службы манипулятора или к случаям перегрузки составных частей или к ошибке отклонения.
1. Переместить курсор в каждый пункт и ввести требуемые числовые данные. Когда используются несколько инструментов, нажать <Next Page> для перехода на следующую страницу и ввода данных инструмента.
2. После ввода всех данных нажать ввод. 3. Появление надписи “Setting complete” указывает на завершение операции.
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-06-06; просмотров: 197; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.135.208.236 (0.006 с.) |










 движение, базирующееся на фиксированной инструментальной системе координат).
движение, базирующееся на фиксированной инструментальной системе координат).







