Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
A-0803 reset check sum errorСодержание книги
Поиск на нашем сайте Эта функция позволяет пользователю очистить ошибку проверки суммы (-1019), если установлено разрешение (Enable), когда ошибка проверки суммы случается в системных данных.
При выполнении этой функции, если есть любые ошибки проверки суммы, остающиеся в данных, ошибка не может быть очищена. В таком случае отражаются инструкции для переустановки данных, которые включают в себя ошибку проверки сумм.
(ПРИМЕЧАНИЕ) Эта установка автоматически переустанавливается в Disable, когда силовое питание выключается и включается заново.
1. Выберитеt Enable или Disable. Если установка корректна, нажмите ↵.
A-0804 SOFTWARE VERSION Эта функция отражает следующую информацию: версия программного обеспечения, инсталлированная в контроллер робота и пульт ручного управления, модель робота, количество сигналов входа, выхода и т.д.
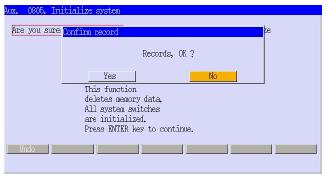
A-0805 INITIALIZE SYSTEM
Инициализация системы стирает все Программы и данные переменных из памяти. Эта функция инициализирует память контроллера.
1. Выбрать инициализацию и нажмите ↵.
2. Появляется подтверждающий экран. Для подтверждения инициализации нажимают <Yes>, для отмены <No> и нажимают SELECT.
3. Появление надписи “Setting complete” сообщает о завершении установки.
Инициализация системы будет:
Удалять все программы; Удалять все переменные; Устанавливать исходное положение значений системных переключателей, значений дополнительных функций.
Единственная информация, которую не затрагивает процесс инициализации: Zeroing data (данные обнуления), параметры настройки для пользовательских приоритетных сигналов.
A-0806 BATTERY ERROR CHECK Эта функция устанавливает либо разрешение, либо запрещение появления сообщения на пульте ручного управления о состоянии батарейки.
1. Выберите Enable или Disable. Если установка корректна, нажмите ↵.
A-0807 CHECK SPECIFICATION Эта функция устанавливает разрешить или запретить выполнение CALL, TIMER, JUMP/END, OX, WX, CLAMP в течение процесса пошаговой проверки.
Различие между проверкой сверху вниз и снизу вверх в моменты движения показано в таблице ниже. Однако, некоторые версии программного обеспечения не снабжены этими функциями.
1. Выберите Enable или Disable для каждого пункта. Если установка корректна, нажмите ↵.
A-0808 ENVIRONMENT DATA 1. Автоматическое отключение серво управления Выключает серво управление в течение автоматической операции после установленного периода времени, в то время как робот находится в ожидании сигнала WX.
1. Для того чтобы отключить серво управление, переводят курсор в [Auto Servo OFF Time] и вводят время в секундах (числами). Ввод 0 делает эту функцию неэффективной. Если установка корректна, нажмите ↵.
2. Отключение пульта ручного управления
Обычно робот работает с подключенным пультом ручного управления. Автоматическая операция возможна без подключенного пульта ручного управления, используя следующие процедуры.
(1) Установите TEACH/REPEAT переключатель на операционной панели в положение REPEAT. (2) Установите TEACH PENDANT в DISCONN. (Переместите курсор в [Teach Pendant] и выберите Disconn. Затем нажмите ↵.)
(2) Выключите силовое питание (3) Вытащите разъем пульта ручного управления с панели контроллера (4) Вставьте заглушку (5) Включите силовое питание
(ПРИМЕЧАНИЕ) Установите TEACH/REPEAT переключатель в положение REPEAT без сбоя до установки в DISCONN (отсоединен). В режиме обучения установка автоматически возвращается в CONN (подключен), когда пульт ручного управления подключен.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-06-06; просмотров: 252; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.01 с.) |