
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Возможности обеспечения безопасности, предусмотренные в контроллере робота KawasakiСодержание книги
Поиск на нашем сайте
Роботы Kawasaki оснащены возможностями, показанными ниже, для того чтобы обеспечить необходимые меры безопасности, чтобы пользователь мог использовать их совместно с мерами по обеспечению дополнительной безопасности. Используйте эти особенности и разрабатывайте меры по обеспечению безопасности, которые являются соответствующими для каждой индивидуальной системе. 1. Все схемы Аварийного Останова составлены из логических схем аппаратных средств. 2. На пульте ручного управления и на панели контроллера установлены кнопки, имеющие форму грибка, и фиксирующиеся при нажатии. При этом происходит отключение силового питания приводов.
3. Скорость движения и допустимые отклонения некоторых функций робота (например: ускорение, замедление и т.д.) контролируются системой управления, любое превышение допуска отклонений приводит к прерыванию выполнения каких-либо операций с отключением силового питания привода, и выводом сообщения на экран пульта ручного управления, на панели управления загорается лампочка ERROR.
4. Для безопасности, максимальная скорость для робота в режиме обучения или наладки должна быть ограничена 250 mm/s (безопасная скорость движения).
5. Диапазон движения робота установлен на максимальный диапазон при отгрузке с завода, если другие требования не определены. Однако это возможно изменить, используя средства программного обеспечения или пределы механического стопора. Для деталей, обратитесь к отдельному руководству «Монтаж и подключение» Р 4. 5. 6. Управление диапазоном движения только одним программным обеспечением недостаточно как средства для предотвращения несчастных случаев и повреждений. Удостоверьтесь, чтобы установили механические стопоры и Ограждения
7.
Если диапазон движения должен быть изменен по сравнению с диапазоном, установленным изготовителем, необходимо гарантировать, что робот не будет сталкиваться с механическими упорами. ПЕРЕКЛЮЧАТЕЛИ, КЛАВИШИ И ИЗОБРАЖЕНИЯ
Эта глава дает краткий обзор контроллера, различных видов переключателей, которыми оборудован контроллер, и аппаратных клавиш и изображений на пульте ручного управления.
2.0 Переключатели, клавиши и экраны 21
2.1 Краткое описание контроллера 22
2.2 Переключатели на контроллере 23
2.3 Краткое описание пульта ручного управления 24
2.4 Аппаратные клавиши на пульте ручного управления 25
2.5 Вид экрана пульта ручного управления 28
2.5.1 Изображение A области 29
2.5.2 Изображение В области 29
2.5.3 Изображение С области 31
КРАТКОЕ ОПИСАНИЕ КОНТРОЛЛЕРА
Внешняя панель системы управления (СУ), осуществляет следующие функции: 1.1. Включает/выключает общее силовое питание (переключатель 1 рис.1.) Включение – положение 1 переключателя Выключение – положение 0 переключателя 1.2. Обеспечивает при использовании операционной панели, в дальнейшем обозначаемой ОП (операционная панель рис 1.) выбор режимов управления (режим обучения, режим выполнения программ, мониторный режим, т.е. выполнение единичной инструкции)
операционная панель разъем ПРУ
главный переключатель (переключатель 1)
устройство внешней памяти
Рис. 1 1. Переключатель силового питания: ПЕРЕКЛЮЧАТЕЛЬ "вкл. - выкл." для этого контроллера
2. Операционная панель: обеспечивает различные виды выключателей, необходимых для того, чтобы работать с роботом. Обратитесь к 2.2 Переключатели на Контроллере для большего количества подробностей.
3. Пульт ручного управления: обеспечивает клавиши, необходимые для обучения робота и редактирования данных, и экран для того, чтобы отображать и использовать различные виды данных. Для большего количества подробностей, обратитесь к 2.4 Аппаратные кнопки на пульте ручного управления, и 4.0 Инструкции для работы с экраном пульта ручного управления, соответственно.
4. Внешнее Устройство Памяти: стандартные PC - карты, или дискета/магнитный накопитель, может также использоваться (опция).
|
||||
|
|
Последнее изменение этой страницы: 2016-06-06; просмотров: 236; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 13.59.91.59 (0.009 с.) |



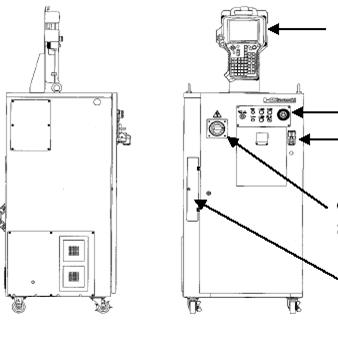 пульт ручного управления
пульт ручного управления


