Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Суим на основе средств управления фирмы «овен»Содержание книги
Поиск на нашем сайте
Для управления ЭИМ постоянной и переменной скорости мо- гут использоваться различные программируемые контроллеры, частотные регуляторы, сервосистемы, терминалы, программное
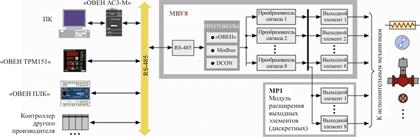
Рис. 10.7. Модуль управления ИМ МВУ8 фирмы «ОВЕН» реле и т.д. Это далеко не пол- ный список оборудования данной фирмы. Восьмиканальный модуль управления исполнительными механизмами для распределенных систем работает в сети RS- 485 (протоколы «ОВЕН», MODBUS, DCON) – см. рис. 10.7. Модуль может использоваться в следующих случаях: – в качестве удаленного блока выходных устройств для SCADA-системы или программируемых контроллеров («ОВЕН ПЛК» или др.); – для интеллектуального управления исполнительными меха- низмами. МВУ8 работает в сети RS-485 при наличии в ней «мастера», при этом сам МВУ8 не является мастером сети. Функциональная схема модуля приведена на рис. 10.8. Ниже перечислены основные функции модуля: 1. До восьми каналов управления различными исполнитель- ными механизмами (ИМ): а) двухпозиционными (ТЭНы, компрессоры, электромагнит- ные клапаны и другие, в том числе с ШИМ-модуляцией); б) трехпозиционными (ЭИМ постоянной скорости на задвиж- ках, шаровых и пробковых кранах и др.), как с датчиком положе- ния, так и без него; в) ИМ с аналоговым управлением, прежде всего ЭИМ пере- менной скорости.
Рис. 10.8. Функциональная схема модуля МВУ8 фирмы «ОВЕН»
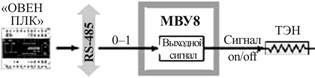
2. Возможность расширения до 16 каналов управления путем подключения восьмиканального модуля дискретных выходных элементов «ОВЕН МР1». 3. Непосредственное управление ИМ по сигналу SCADA- системы или программируемого контроллера (ШИМ с высокой точностью, режимы on/off). 4. Возможности интеллектуального управления ИМ: а) генерация управляющего ШИМ-сигнала заданной скважно- сти (или аналогового сигнала) по расчетной мощности, получен- ной из сети RS-485 от ПИД-регулятора или его модели в SCADA- системе; б) управление сложными системами ИМ, например системой нагреватель – холодильник, группой ТЭНов, системами дискрет- ной сигнализации и т.п.; в) контроль нахождения в заданных пределах значения физи- ческой величины, поступающей из сети RS-485; г) автоматический перевод ИМ в аварийный режим работы при нарушении сетевого обмена. 5. Поддержка распространенных протоколов MODBUS (ASCII, RTU), DCON, «ОВЕН». 6. Бесплатная программа «Конфигуратор МВУ8»: а) конфигурирование прибора на ПК; б) регистрация состояния выходных элементов (скважности ШИМ или выходного тока/напряжения). 7. Высокая помехоустойчивость благодаря импульсному ис- точнику питания напряжением 90–245 В частотой 47–63 Гц. В стандартной модификации модуль содержит следующие типы выходных элементов: Р – восемь реле электромагнитных 4 А, 220 В; И – восемь цифроаналоговых преобразователей (4–20 мА). К заказным модификациям дополнительно относят следую- щие типы выходных элементов: К – транзисторная оптопара структуры n–p–n, 400 мА, 60 В; С – симисторная оптопара 50 мА, 250 В; Т – выход 4–6 В, 50 мА для управления твердотельным ре- ле; У – цифроаналоговый преобразователь (0–10 В). Восемь одно- типных выходных элементов в обозначении модуля указываются первой буквой, например МВУ8-С. Модуль выпускается в корпусе типа Д9 для крепления на DIN-рейку. В МВУ8 установлен модуль интерфейса RS-485, позволяю- щий выполнять следующее: – конфигурировать прибор на ПК (программа-конфигуратор «Конфигуратор» представляется бесплатно); – получать из сети сигналы состояния дискретных выходов и скважность ШИМ (при непосредственном управлении выходами МВУ8 и МР1), текущие значения выходной мощности регуляторов и измеренных величин, а также любых программируемых пара- метров; – регистрировать состояние выходных элементов прибора. МВУ8 может работать в сети только при наличии в ней масте- ра, который призван организовать обмен данными в сети по интер- фейсу RS-485 (инициировать обмен данными между отправителем и получателем данных). В качестве мастера сети могут использо- ваться приборы «ОВЕН ТРМ151»,ТРМ-133, программируемые кон- троллеры «ОВЕН ПЛК», SCADA-система, ОРС-драйвер, персо- нальный компьютер и т.п. Подключение МВУ8 к ПК производится через адаптер «ОВЕН АС3-М». Для организации обмена данными пользователь составляет для мастера сети список опроса, вклю- чающий до 32 оперативных параметров, относящихся к разным приборам сети. В списке опроса необходимо указать имя и адрес каждого оперативного параметра. Эти сведения, а также тип пара- метра нужно указать для сетевых входов МВУ8. Для сетевого обмена с МВУ8 пользователь может выбрать один из четырех протоколов: «ОВЕН», MODBUS-RTU, MODBUS-ASCII или DCON. Конфигурирование МВУ8 осуществляется по прото- колу «ОВЕН» [22]. Поддержка распространенных протоколов MODBUS и DCON позволяет МВУ8 работать в одной сети с контроллерами и моду- лями как фирмы «ОВЕН», так и других фирм-производителей. При интеграции МВУ8 в АСУТП в качестве программного обеспечения можно использовать SCADA-систему Owen Process Manager или какую-либо другую программу. В комплект поставки прибора бесплатно входит: – драйвер для работы со SCADA-системой Trace Mode; – OPC-сервер для подключения прибора к любой SCADA- системе или другой программе, поддерживающей OPC-технологию; – библиотеки WIN DLL для быстрого написания драйверов. В МВУ8 предусмотрена возможность непосредственно управлять выходными элементами (ВЭ) и подключенными к ним исполнительными механизмами через сеть RS-485. Благодаря это- му МВУ8 легко используется любой инициируемой SCADA- системой или программируемым контроллером (например, «ОВЕН ПЛК») в качестве алгоритма модуля выходов. Возможно прямое управление выходными элементами как само- го МВУ8, так и подключенного к нему модуля расширения МР1. Прямое управление ВЭ позволяет делать следующее: – включать-выключать дискретный ВЭ (реле, оптотранзистор, оптосимистор); – задать выходной ток/напряжение для аналогового ВЭ (ЦАП); – задать скважность и период ШИМ для дискретного ВЭ. При этом ШИМ генерируется прибором с высокой точно- стью, которую нельзя обеспечить при передаче команд. Пример непосредственного управления исполнительным ме- ханизмом по сигналу SCADA-системы приведен на рис. 10.9.
Рис. 10.9. Непосредственное управление ИМ по сигналу SCADA-системы
Пример непосредственного управления исполнительным ме- ханизмом по сигналу контроллера «ОВЕН ПЛК» приведен на рис. 10.10.
Рис 10.10. Непосредственное управление ИМ по сигналу контроллера «ОВЕН ПЛК»
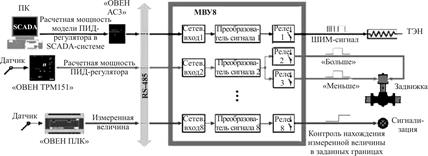
Интеллектуальное управление ИМ предполагает наличие в СУИМ как минимум двух модулей в составе МВУ8: модуля се- тевого ввода (СВ) и модуля преобразователя сигналов (ПС) [22]. В целом МВУ8 – интеллектуальный модуль вывода, который по сигналу от регулятора из сети RS-485 позволяет управлять раз- личными исполнительными механизмами: – двухпозиционным ИМ (ТЭНом, клапаном, электродвигате- лем). Для управления генерируется ШИМ-сигнал с высокой точ- ностью или сигнал on/off; – трехпозиционным ИМ (ЭИМ управления задвижкой, жалю- зи и т.п.) с датчиком положения. Датчик положения подключают к свободному входу любого из устройств, работающих совместно с МВУ8 в одной сети, и значения, измеряемые датчиком, переда- ются в прибор; – трехпозиционным ИМ (задвижкой, жалюзи) без датчика по- ложения. В этом случае необходимо задать время работы ИМ и его начальное положение, и прибор самостоятельно будет вычислять текущее положение в любой момент времени; – ИМ с аналоговым управлением. Для управления прибор ге- нерирует сигнал тока 4–20 мА или напряжения 0–10 В; – сложной системой ИМ, например системой из двух ТЭНов, системой нагреватель – холодильник или комбинированной. МВУ8 может также контролировать диапазон нахождения ве- личины, измеренной другими приборами в сети RS-485 (например, модулем «ОВЕН МВА8»). Это позволяет использовать МВУ8 в системах сигнализации, в том числе дискретной СУИМ. СУИМ на основе интеллектуального устройства «ОВЕН МВУ8» используется совместно с ПК, «ОВЕН ТРМ151» и «ОВЕН МВА8» для управления и такими ИМ, как ТЭН, управляемая за- движка и другие, а также для сигнализации заданного и реального состояний технологического параметра. Пример интеллектуального управления комбинированной системой исполнительных механизмов приведен на рис. 10.11. Выходные элементы МВУ8 В приборе по желанию заказчика могут быть установлены в различных комбинациях выходные элементы со следующими па- раметрами: – электромагнитные реле, 4 А, 220 В; – транзисторные оптопары структуры n–p–n, 400 мА, 60 В; – симисторные оптопары, 50 мА, 250 В; – ЦАП «параметр – ток 4–20 мА»; – ЦАП «параметр – напряжение 0–10 В»; – для управления твердотельным реле 4–6 В, 50 мА.
Рис. 10.11. Интеллектуальное управление комбинированной системой исполнительных механизмов
Количество выходных элементов МВУ8 может быть расши- рено до 16 путем подключения восьмиканального модуля дис- кретных выходных элементов «ОВЕН МР1». Модуль МР1 под- ключается к МВУ8 напрямую, управляется от МВУ8 и не требует никакого самостоятельного конфигурирования и настройки.
ЗАКЛЮЧЕНИЕ В последние два-три десятилетия системы управления испол- нительными механизмами претерпевают существенные изменения, что связано прежде всего с бурным развитием микропроцессорной техники и ее доступностью. Отметим основные моменты, определяющие сегодняшнее со- стояние, а также основные тенденции в развитии отечественных СУИМ. 1. Становление российских научно-производственных фирм (НПФ), предприятий-разработчиков и производителей ИМ и СУИМ (НПФ «КонтрАвт», НПФ «ОВЕН», «МЗТА», «ЗЭиМ», «Тулаэлектропривод» и др.). 2. Интенсивное развитие дилерских сетей, рост числа и разви- тие фирм – поставщиков средств автоматизации, выпускаемых за- рубежными компаниями, такими как Siemens, Omron, Schneider Electric и многими другими. 3. Создание многочисленных специализированных центров подготовки и переподготовки специалистов в области автоматиза- ции, а также становление и развитие различных пусконаладочных организаций. 4. Наблюдается интенсивный переход от локальной автомати- зации к построению интегрированных, полнофункциональных многоуровневых и распределенных (децентрализованных) систем управления. Учитывая место СУИМ в АСУТП (нижний уровень контроля и управления), нельзя не отметить появление на рынке многоканальных модулей ввода-вывода и управления (MDS- модулей) для распределенных СУИМ. 5. Доминирование в СУИМ как постоянной, так и переменной скорости ЭИМ переменного тока (асинхронных с короткозамкну- тым ротором, синхронных с постоянными магнитами), а также бесколлекторных электроприводов постоянного тока (вентильных электроприводов). 6. Доминирование в СУИМ постоянной скорости бесконтакт- ных реверсивных пускателей серий БУЭР, ПБР, ФЦ и других, а также специализированных или универсальных микропроцес- сорных регуляторов-измерителей, таких как «МЕТАКОН 5×2», «МЕТАКОН 5×4», Т-424, РС-29М, ТРМ133, ТРМ151, «ОВЕН ПЛК» и др. 7. Доминирование в СУИМ переменной скорости ЭИМ с час- тотно-регулируемыми микропроцессорными электроприводами. 8. Модернизация приводов постоянного тока в части замены аналоговых силовых преобразователей для питания цепей якоря и возбуждения на полностью цифровые преобразователи. 9. Интегрирование интеллектуальных модулей в части объе- динения СПЭ с ЭИМ, что обеспечивает компактность и быстро- действие СУИМ. 10. Оснащение СУИМ средствами интеллектуализации (иден- тификация, адаптивная настройка алгоритмов управления, самоди- агностика, сетевой обмен информацией и др.).
СПИСОК ЛИТЕРАТУРЫ 1. ГОСТ 14691–69. Устройства исполнительные для систем автоматического регулирования. Термины. Доступ через справ.- правовую систему «КонсультантПлюс». 2. ГОСТ Р 52720–2007. Арматура трубопроводная. Термины и определения. Доступ через справ.-правовую систему «Консуль- тантПлюс». 3. ГОСТ 34.601–90. ЕСКД. Автоматизированные системы. Стадии создания. Доступ через справ.-правовую систему «Кон- сультантПлюс». 4. ГОСТ 24.602–86. ЕСКД. Документация на АСУ. Состав и содержание работ по стадиям. Доступ через справ.-правовую систему «КонсультантПлюс». 5. ГОСТ 2.102–68. ЕСКД. Виды и комплектность конструк- торских документов. Доступ через справ.-правовую систему «Кон- сультантПлюс». 6. ГОСТ 2.105–95. ЕСКД. Общие требования к текстовым до- кументам. Доступ через справ.-правовую систему «Консультант- Плюс». 7. Шегал Г.Л., Коротков Г.С. Электрические исполнительные механизмы в системах управления. Библиотека по автоматике. – М.: Энергия, 1968. – Вып. 308. – 160 с. 8. Емельянов А.И., Емельянов В.А. Исполнительные устрой- ства промышленных регуляторов. – М.: Машиностроение, 1975. – 224 с. 9. Технические средства автоматизации: учеб. пособие / М.М. Мордасов, Д.М. Мордасов, А.В. Трофимов, А.А. Чуриков. – Тамбов: Изд-во Тамб. гос. техн. ун-та, 2005. – 168 с. 10. Государственная система промышленных приборов и средств автоматизации: Номенклатурный каталог / ЦНИИТЭИ- приборостроения. – М., 1984. – Ч. 1. – 172 с. 11. Полковников В.А. Параметрический синтез исполнитель- ных механизмов гидравлических приводов систем управления ле- тательных аппаратов: учеб. пособие / МАИ. – М., 2001. – 100 с. 12. Куо Б. Теория и проектирование цифровых систем управ- ления: пер. с англ. – М.: Машиностроение, 1986. – 448 с. 13. Теория автоматического управления: учеб. для вузов / В.Н. Брюханов, М.Г. Косов, С.П. Протопопов [и др.]; под ред. Ю.М. Соломенцева. – М.: Высш. шк., 2000. – 268 с. 14. Справочник по теории автоматического управления / под ред. А.А. Красовского. – М.: Наука. Гл. ред. физ.-мат. лит., 1987. – 712 с. 15. Ганин Н.М. Математические модели автоматизированных производственных систем: учеб. пособие. – Л.: Изд-во ЛГТУ, 1991. – 271 с. 16. Казанцев В.П. Теория автоматического управления (ли- нейные системы): учеб. пособие. – Пермь: Изд-во Перм. гос. техн. ун-та, 2007. – 165 с. 17. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управле- ние электроприводами. – Л.: Энергоиздат, 1982. – 392 с. 18. Ильинский Н.Ф., Казаченко В.Ф. Общий курс электропри- вода. – М.: Энергоатомиздат, 1992. – 544 с. 19. Эпштейн И.И. Автоматизированный электропривод пере- менного тока. – М.: Энергоиздат, 1982. – 192 с. 20. Перельмутер В.М., Сидоренко В.А. Системы управления тиристорными электроприводами постоянного тока. – М.: Энерго- атомиздат, 1988. – 303 с. 21. Казанцев В.П. Методологические аспекты синтеза регуля- торов класса «Вход-Выход» цифровых систем управления // Ин- формационные управляющие системы: сб. науч. тр. / Перм. гос. тех. ун-т. – Пермь, 2006 – С. 285–296. 22. Борцов Ю.А., Поляхов Н.Д., Путов В.В. Электромехани- ческие системы с адаптивным и модальным управлением. – Л.: Энергоатомиздат, 1984. – 216 с. 23. Электротехнический справочник: в 3 т. Т. 3: в 2 кн. Кн. 2. Использование электрической энергии / под общ. ред. И.Н. Орлова [и др.]. – 7-е изд. – М.: Энергоатомиздат, 1988. – 616 с. 24. Сосонкин В.Л. Программное управление технологическим оборудованием. – М.: Машиностроение, 1991. – 512 с. 25. Коровин Б.Г., Прокофьев Г.И., Рассудов Л.Н. Системы программного управления промышленными установками и робо- тотехническими комплексами / ЭАИ. – Л., 1990. – 20 с. 26. Парр Э. Программируемые контроллеры: руководство для инженера. – М.: БИНОМ: Лаборатория знаний, 2007. – 516 с. 27. Петров И.В. Программируемые контроллеры. Стандарт- ные языки и приемы прикладного проектирования / под ред. проф. В.П. Дьяконова. – М.: СОЛОН-Пресс, 2004. – 256 c. 28. Модуль вывода управляющий восьмиканальный МВУ8. Паспорт и руководство по эксплуатации / НПФ «ОВЕН». – М., 2008. – 64 с. 29. Синтез электромеханических приводов с цифровым управлением / В.Л. Вейц, П.Ф. Вербовой, О.Л. Вольберг, А.М. Съя- нов; АН Украины. Ин-т электродинамики. – Киев: Наук. думка, 1991. – 232 с. 30. Олссон Г., Пиани Дж. Цифровые системы автоматизации и управления. – СПб.: Невский Диалект, 2003. – 557 с. 31. Плескач Н.В. Интеллектуальные средства для исполни- тельных механизмов ОАО «ЗЭиМ» // Промышленные АСУ и кон- троллеры. – 2005. – № 11. – С. 16–27. Учебное издание
КАЗАНЦЕВ Владимир Петрович
|
||||||||||
|
|
Последнее изменение этой страницы: 2021-07-18; просмотров: 88; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.149.29.209 (0.009 с.) |

 обеспечение, температурные регуляторы и иные регулято- ры, различные типы датчиков, а также интеллектуальные мо- дули вывода, такие как МВУ8 фирмы «ОВЕН» (рис. 10.7),
обеспечение, температурные регуляторы и иные регулято- ры, различные типы датчиков, а также интеллектуальные мо- дули вывода, такие как МВУ8 фирмы «ОВЕН» (рис. 10.7),