
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Пропорционально-интегрально-дифференциальный регу- лятор (ПИД-регулятор).Содержание книги
Поиск на нашем сайте
Принципиальная схема регулятора приведена на рис. 4.33.
Рис. 4.33. Принципиальная электрическая схема ПИД-регулятора
Передаточная функция регулятора W (P) = Z 0 (P) = R 0 + 1/ C 0 P =
Z вх (P) (R вх / C вх P) / (R вх + 1 / C вх P) = æ R 0 + С вх ö + 1/ R C P + R С P = K
+ 1 / Т Р + Т Р,
вх 0 0 вх p и д è вх 0 ø где K p – коэффициент передачи регулятора, K р = R 0/ R вх + C вх/ С 0; T и – постоянная времени интегрирования, T и = R вх С 0; T д – постоян- ная времени дифференцирования, T д = R 0 С вх. Временная характеристика регулятора Y вых(t) = Y вых(0) + K р·1(t) + (1/ T и P)·1(t)· t + T дd(t), где d(t) – дельта-функция Дирака, Y вых(0) = 0. Переходный процесс в регуляторе будет иметь вид, изобра- женный на рис. 4.34, функциональная схема приведена на рис. 4.35. По аналогии с ПИ-регулятором ММ ПИД-регулятора часто представляют в виде изодромного звена второго порядка:
T и P где Т из 1, Т из 2 – постоянные времени изодромного звена; Т из 1 = R 0 С 0, Т из 2 = R вх С вх.
Рис. 4.34. Переходный процесс в ПИД-регуляторе ПИД-рег.
Рис. 4.35. Функциональная схема ПИД-регулятора
На практике часто применяются иные схемы ПД- и ПИД- регуляторов, обеспечивающие реальное дифференцирование ошибки регулирования и, соответственно, более высокую помехо- защищенность системы. Помимо рассмотренных регуляторов применяются также ре- гуляторы класса «вход-выход» иных структур: ИПИ, И2П, ПДД и т.п. ПИ-регулятор в компенсационных системах управления обеспечивает компенсацию одной большой постоянной времени объекта управления, а ПИД-регулятор – двух больших постоянных времени, обеспечивая тем самым форсирование динамических процессов и улучшение динамики СУИМ. Регуляторы, содержа- щие более одного интегратора, призваны обеспечить астатизм СУИМ при аддитивных воздействиях не только в виде ступенча- той функции времени, но и в виде временной функции более сложного вида. ПДД-регуляторы применяют в СУИМ интегри- рующего типа. Регуляторы включают, как правило, последовательно с объек- том управления. Они призваны скорректировать динамику СУИМ с целью удовлетворения требований к ее статическим и динамиче- ским показателям. При синтезе СУИМ вместо понятия «регуля- тор» часто применяют понятие «корректирующее устройство» («корректирующее звено»), включаемое последовательно с объек- том управления или его частью, иногда – в обратной связи по ре- гулируемой координате. Наибольшее распространение в СУИМ нашли следующие кор- ректирующие устройства, позволяющие варьировать полюсами и ну- лями и тем самым корректировать динамику СУИМ [13, 14, 16]: – реальное пропорционально-дифференцирующее звено пер- вого порядка: W ку (p) = K (p + b) (p + a), где a и b – соответственно полюс и нуль передаточной функции, причем при | a | > | b | осуществляется коррекция системы с опереже- нием по фазе, при | b | > | a | – коррекция системы с отставанием по фазе; проблема параметрического синтеза корректирующих уст- ройств сводится к определению параметров K, a, b;
– реальное пропорционально-дифференцирующее звено вто- рого и более высокого порядка:
K Õ(p + bi )
Õ( p + a j) j =1
где aj, bi – соответственно полюса и нули корректирующего звена, выбором которых стремятся стабилизировать требуемые показате- ли качества скорректированной системы (m > 1, n > 1); – апериодическое звено (фильтр) первого порядка:
W ку (p) = 1,
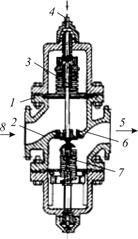
применяемое для фильтрации сигналов измерительного тракта, а также в качестве предшествующего фильтра (фильтра на входе замкнутой системы управления) [17, 18]. В отечественной промышленности выпускается целый ряд ав- томатических электронных регуляторов, позволяющих автомати- зировать технологические процессы: температуры, давления, рас- хода, уровня, влажности и т.д. Среди них довольно распростра- ненными являются системы автоматического регулирования «Каскад» и «Кристалл». Функциональное назначение и устройство блоков регуляторов этих систем одинаковы. В частности, прибор Р-25 («Кристалл») имеет следующие основные элементы: измери- тельный блок, электронный блок, датчик измеряемой (регулируе- мой) величины, его задатчик. Научно-производственная фирма «КонтрАвт» производит большую линейку локальных интегрированных микропроцессор- ных регуляторов серии «МЕТАКОН» различной степени сложно- сти и функционального предназначения. Это двух- и трехпозици- онные терморегуляторы, ПИД- и ПДД-регуляторы (регуляторы, реализующие функции ПИД-регулирования совместно с реверсив- ными исполнительными механизмами интегрирующего типа: трехходовыми клапанами, заслонками и т.п.). Они могут иметь от одного до шести независимых каналов, принимать входной сигнал разной природы и управлять различными устройствами на выходе. Используются в качестве регуляторов температуры, уровня и рас- хода воды или газа и т.д. Наиболее часто используются как термо- регуляторы, хотя и спроектированы как универсальные регули- рующие устройства. Регуляторы прямого действия реализуют простейшие зако- ны регулирования и применяются для автоматизации простых объектов с малым числом регулируемых переменных, не предъяв- ляющих повышенных требований к качеству систем регулирова- ния (котлов малой производительности, теплообменников индиви- дуальных и центральных тепловых пунктов, газосмесительных станций, нагревательных печей и т.п.). Эти регуляторы применяют для автоматической стабилизации температуры, давления и пере- пада давления, расхода газообразных и жидких сред и уровня жидких сред. На рис. 4.36 приведена схема регулятора температу- ры прямого действия. Регулятор температуры серии РТ состоит из регулирующего клапана 1 и герметичной термосистемы, содержа- щей термобаллон с узлом настройки 2 и исполнительный орган 3. Допустимое давление среды, в которую помещают термобаллон, составляет 1,6 МПа. При регулировании температуры воздействи- ем на расход греющей среды применяют регуляторы с прямым клапаном, охлаждающей среды – с обратным клапаном. Регуляторы давления прямого действия (рис. 4.37) применяют для автоматического поддержания заданного значения давления воды, пара, газа, нефтепродуктов. В частности, регулятор давления РД-32 обеспечивает давление до 1,6 МПа, имеет пределы регули- рования 25–100 и 63–250 кПа, диаметр условного прохода 32 мм, температуру регулируемой среды в пределах 0–200 °С.
Рис. 4.36. Регулятор температуры РТ прямого действия Рис. 4.37. Регулятор давления прямого действия
Для поддержания постоянного перепада давления на вводе в системы отопления (а следовательно, для стабилизации темпера- туры внутри отапливаемых помещений) устанавливают регулято- ры расхода РР (рис. 4.38). Регулятор расхода РР поддерживает постоянный перепад дав- ления на регулируемом участке (между регулятором и местом присоединения импульсной трубки). Регулируемый участок дол- жен иметь значительное гидравлическое сопротивление. В качест- ве регулируемого участка может быть использовано сопло элева- тора или специально устанавливаемая диафрагма.
некотором подъеме клапана, обеспечивающем заданный пере- пад давления. Иначе говоря, на клапан действует разность значе- ний давления, равная потере дав- ления в регулируемом участке. Усилие от этой разности, прижи- Рис. 4.38. Регулятор расхода прямого действия: 1 – корпус; 2 – клапан; 3 – сильфон; 4 – импульсная трубка; 5 – выход воды; 6 – седло; 7 – пружина; 8 – вход воды
Принцип работы, характеристики и математические модели цифровых и релейно-импульсных регуляторов рассмотрены в последующих главах применительно к соответствующим СУИМ.
|
||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-07-18; просмотров: 194; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.134 (0.008 с.) |

 R вх R 0 С 0
R вх R 0 С 0


 ç R С ÷
ç R С ÷ W ( P) = (T из1 P + 1)(T из 2 P + 1),
W ( P) = (T из1 P + 1)(T из 2 P + 1), t
t

 (p + a)
(p + a)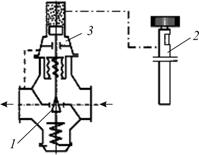
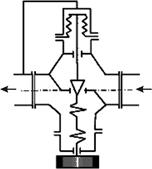
 Давление воды непосредст- венно за регулятором, действуя на плоскую поверхность клапа- на 2 снизу, стремится прикрыть его, но этому усилию противо- действует, во-первых, усилие от действия давления с внешней стороны сильфона 3, равное дав- лению воды в месте присоедине- ния импульсной трубки 4, и, во- вторых, усилие растянутой пру- жины 7. Эти противоположные усилия уравновешиваются при
Давление воды непосредст- венно за регулятором, действуя на плоскую поверхность клапа- на 2 снизу, стремится прикрыть его, но этому усилию противо- действует, во-первых, усилие от действия давления с внешней стороны сильфона 3, равное дав- лению воды в месте присоедине- ния импульсной трубки 4, и, во- вторых, усилие растянутой пру- жины 7. Эти противоположные усилия уравновешиваются при



