Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Электрические исполнительные механизмыСодержание книги
Поиск на нашем сайте
В соответствии с работой [1] электрические исполнительные механизмы (далее – ЭИМ) определяются как исполнительные ме- ханизмы, использующие электрическую энергию. ЭИМ представляют собой регулируемые электроприводы и являются наиболее распространенным классом ИМ в системах автоматизации большинства объектов техники (около 95 % от объ- ема всех ИМ). Этому способствуют многочисленные достоинства, связанные с простотой и качеством преобразования электрической энергии питающей сети в механическую энергию перемещения рабочих (регулирующих) органов. ЭИМ постоянной скорости для управления ЗРА подраз- деляются на три группы по характеру движения выходного эле- мента: – механизмы электрические однооборотные (МЭО), или, иными словами, поворотные, выходной элемент которых вращает- ся по дуге до 360°; служат для управления шаровыми кранами и поворотными дисковыми затворами; – механизмы электрические многооборотные (МЭМ), выход- ной элемент которых вращается более 360°; служат для управле- ния шиберными и клиновыми задвижками; – механизмы электрические прямоходные (МЭП), выходной элемент которых перемещается поступательно; служат для управ- ления клапанами любых типов.
Внешний вид ряда таких ЭИМ приведен на рис. 1.7–1.9. а б Рис. 1.7. Механизмы электрические однооборотные с рычажным выходным элементом МЭО (а) и с фланцевым выходным элементом МЭОФ (б) производства ОАО «МЗТА»
Рис. 1.8. Механизм электрический многооборотный МЭМ производства ОАО «МЗТА»
а б Рис. 1.9. Механизм электрический прямоходный МЭП (а) и вариант установки МЭП на трехходовой регулирующий клапан (б)
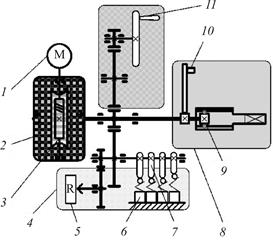
Упрощенная кинематическая схема ЭИМ представлена на рис. 1.10. Рис. 1.10. Упрощенная кинематическая схема ЭИМ В зависимости от типа электроприводы могут состоять из следующих основных узлов: 1 – электродвигатель; 2 – силовой редуктор с главной понижающей передачей; 3 – червячная пара (как пример силовой передачи); 4 – блок сигнализации положения выходного вала, который может содержать следующие элементы: 5 – реостатный датчик положения;
6 – концевые выключатели; 7 – кулачки концевых выключателей, кинематически связан- ные с выходным валом механизма и осуществляющие нажатие на концевые выключатели; 8 – узел преобразования вращения выходного вала; 9 – шариковинтовая пара для прямоходных механизмов; 10 – рычаг или коромысло для поворотных механизмов; 11 – ручной привод со своей передачей и механизмами бло- кирования/деблокирования ручного привода. ЭИМ работает следующим образом. При подаче напряжения питания на электродвигатель 1 исполнительного механизма ротор последнего начинает вращаться. Через силовой редуктор 2 с глав- ной понижающей передачей, например червячной 3, вращение от электродвигателя передается на выходной вал механизма, при этом благодаря большому передаточному отношению частота вращения выходного вала механизма понижается, а момент на вы- ходном валу механизма возрастает. Закрепленный на выходном валу рычаг 10 или механизм преобразования вращательного дви- жения в поступательное 9 приходит в движение и при соединении со штоком, например, клапана перемещает последний. При снятии напряжения с электродвигателя ротор электродвигателя с некото- рым выбегом останавливается и движение выходного вала меха- низма прекращается. При реверсе электродвигателя кинематиче- ски связанный с ротором электродвигателя выходной вал меха- низма приходит во вращение в обратном направлении, а при остановке электродвигателя также останавливается и выходной вал механизма. Силовая передача и силовой редуктор, как уже отмечалось, имеют, как правило, большое передаточное отношение, благодаря чему силовая передача обладает свойством самоторможения и лю- бые моменты или усилия, прикладываемые со стороны выходного вала, не приводят к вращению валов механизма. Выходной вал исполнительного механизма, таким образом, сохраняет свое поло- жение при отсутствии сигналов управления и обесточенном элек- тродвигателе. Очевидно, что в этом случае исполнительный механизм пред- ставляет собой разновидность интегратора, который суммирует и сохраняет управляющие воздействия. Для контроля положения выходного вала механизмы оснащаются блоками сигнализации 4, которые могут содержать датчики положения 5 и концевые микро- выключатели 6, которые также кинематически связаны с главной силовой передачей механизма, благодаря чему обеспечивается достоверная информация о положении выходного вала механизма и его промежуточных положениях. Для перемещения выходного вала механизма без подачи напряжения на электродвигатель, что бывает необходимо при монтаже, пусконаладочных работах и при парировании аварийных ситуаций, электроприводы оснащаются ручными дублерами 11, которые могут быть либо постоянно под- ключенными к главной передаче механизма, либо подключаться через соответствующие механизмы блокирования/деблокирования ручного привода.
Наиболее часто в отечественной практике применяются ЭИМ постоянной скорости следующих производителей: – ОАО «ЗЭиМ», г. Чебоксары; – ЗАО «Тулаэлектропривод» (301114, Тульская обл., Ленин- ский р-н, пос. Плеханово); – ООО «Научно-производственное предприятие „Томская элек- тронная компания“» (ООО НПП «Томская электронная компа- ния», ООО «НПП ТЭК»); – ООО НПО «Сибирский Машиностроитель» (ООО «Сибмаш»). Среди зарубежных производителей на российском рынке наиболее широко представлена продукция фирм: AUMA, BIFFI, Hartmann & Braun, Honeywell, Kromshcroder, REGADA, ROTORK, Siemens, Sauter, Danfoss, Belimo и др. Основными параметрами, определяющими типоразмер ЭИМ ЗРА, являются следующие: – номинальный крутящий момент на выходном валу в ньютон метрах (Н·м) или номинальное перестановочное усилие (Н); – номинальное значение полного хода выходного элемента в оборотах или миллиметрах; – номинальное значение времени полного хода выходного ва- ла в секундах. В табл. 1.2 приведены основные технические характеристики ЭИМ ЗРА, выпускаемых одним из крупнейших производителей и поставщиков ЭИМ – Московским заводом тепловой автоматики (ОАО «МЗТА»). Таблица 1.2 Технические характеристики ЭИМ ЗРА фирмы ОАО «МЗТА»
Ниже рассмотрены основные функциональные возможности ЭИМ и опции комплектации на примере продукции ОАО «МЗТА». ЭИМ ЗРА обеспечивают: – автоматическое, дистанционное или ручное управление ра- бочим органом запорной арматуры; – автоматический или дистанционный останов рабочего орга- на в любом промежуточном положении; – позиционирование рабочего органа в любом промежуточ- ном положении; – формирование сигнала обратной связи о конечных и про- межуточных положениях рабочего органа. ЭИМ оснащаются одним из видов блока сигнализации по- ложения выходного вала (БСПИ):
И – индуктивный БСПИ; выходной сигнал представлен в виде изменения взаимоиндуктивности в диапазоне 0–10 мГн; Р – реостатный БСПР; выходной сигнал представлен в виде изменения активного сопротивления в диапазоне 0–120 Ом; У – токовый БСПТ; выходной сигнал представлен в виде унифицированного токового сигнала в диапазонах 0–5, 0–20, 4–20 мА; М – блок концевых выключателей без датчика положения вы- ходного вала (при ручном управлении). ЭИМ ЗРА могут комплектоваться силовыми реверсивными преобразователями энергии (СПЭ) и реверсивной коммутационной аппаратурой типов: ПБР, БУЭР, ФЦ и др. – при бесконтактном управлении; ПМЛ – при контактном управлении. Выбор типа управляющего устройства зависит от типа меха- низма, напряжения питания, условий эксплуатации и др. Рекомендуемые типы управляющих (усилительных) уст- ройств: – для механизмов, имеющих трехфазное напряжение питания (220/380 В): пускатели ПБР-3, ПБР-3А, ПБР-3А АЭС, усилители ФЦ-0610, ФЦ-0620, ФЦ-0650 АЭС; – для механизмов, имеющих однофазное напряжение питания (220 В): пускатели ПБР-2М (ПБР-2М2.1), ПБР-2М1 (ПБР-2М2.2), ПБР-2М АЭС. Механизмы МЭО и МЭОФ производства ОАО «МЗТА» обла- дают целым рядом достоинств: – большой пусковой момент на выходном валу (Мпуск = = 1,7 Мном), что обеспечивает высокие динамические характери- стики механизма; – малый люфт выходного вала механизма, что обеспечивает вы- сокую точность регулирования и малое время позиционирования; – наличие в составе прибора датчика положения выходного вала (токовый, индуктивный или реостатный), концевых и пуско- вых микропереключателей, что позволяет формировать дискрет- ную информацию о крайних и промежуточных положениях рабо- чего органа арматуры и аналоговую (цифровую) информацию о динамике его перемещения; – установленный ограничитель полного хода выходного вала предохраняет арматуру от механического повреждения при отказе концевых микропереключателей; – наличие в составе механизма местного указателя положения регулирующего органа арматуры позволяет оператору следить за работой арматуры непосредственно на месте ее эксплуатации; – возможность установки механизмов в любом положении в пространстве; – высокая степень защиты оболочки механизмов – IP54 по ГОСТ 14254; – соответствие приборов требованиям ГОСТ 7192–89 «Меха- низмы исполнительные электрические постоянной скорости ГСП». Принцип работы механизмов МЭО заключается в преобра- зовании электрического сигнала, поступающего от регулирующего или управляющего устройства, во вращательное перемещение вы-
ходного вала в пределах 0,25–0,63 об. ИМ МЭО и МЭОФ могут применяться в различных отраслях промышленности. Основное применение они находят в системах вентиляции, энергетике, ЖКХ, газовой, нефтяной и химической промышленности, т.е. везде, где используется трубопроводная ар- матура. Механизмы МЭО и МЭОФ работают либо в кратковременном, либо в повторно-кратковременном реверсивном режиме циклами, в которых перемещения выходного вала чередуются с паузами. По- сле паузы (не менее 50 мс) возможно изменение направления пере- мещения выходного вала на противоположное (реверс). ИМ МЭО изготовляются с датчиком обратной связи (блоком сигнализации положения БСП выходного вала) для работы в сис- темах автоматического регулирования или без датчиков обратной связи – с блоком концевых выключателей для режима ручного управления. Параметры питания механизмов: – для однофазной сети: 220, 230, 240 В частотой 50 Гц, 220 В частотой 60 Гц; – для трехфазной сети: 220/380, 230/400, 240/415 В частотой 50 Гц, 220/380 B частотой 60 Гц; – допустимое отклонение напряжения – 15…+10 %; – допустимое отклонение частоты – 2…+2 %. ИМ МЭО выполнены в исполнении У категории размещения 2 и предназначены для работы в следующих условиях: – температура окружающего воздуха от – 30 до +50 °С; – относительная влажность окружающего воздуха до 85 % при температуре +35 °С и более низких температурах без конден- сации влаги; – вибрация в диапазоне частот от 10 до 150 Гц с амплитудой 0,075 мм для частот до 57 – 62 Гц и ускорением 9,8 мм/с2 для частот свыше 62 Гц; – наличие пыли и брызг воды; – отсутствие прямого воздействия солнечной радиации и ат- мосферных осадков. ИМ МЭО тропического исполнения выполнены в исполне- нии Т категории размещения 2 и предназначены для работы при температуре от – 10 до +50 °С и относительной влажности до 100 % при температуре 35 °С с конденсацией влаги. ИМ МЭО не предназначены для работы в средах, содержащих агрессивные пары, газы и вещества, вызывающие разрушение по- крытий, изоляции и материалов, и во взрывоопасных средах. Структура условного обозначения и основные параметры ИМ МЭО: МЭО – ммм / вв – ххх д гг, где ммм – номинальный крутящий момент на выходном валу в Н·м; вв – номинальное значение полного хода выходного органа в оборотах; ххх – номинальное значение времени полного хода в секун- дах; д – тип датчика сигнализации положения выходного вала: И – индуктивный (БСПИ), Р – резистивный (БСПР), У – токовый (БСПТ); гг – год разработки. В механизмах используются электродвигатели: – синхронные низкооборотные с частотой вращения 150 об/мин для механизмов с крутящим моментом до 250 Н·м; – асинхронные двигатели АИР56А4, АИР56В4 для механизмов с крутящим моментом от 250 до 4000 Н·м и даже до 10 000 Н·м. Двигатели обеспечивают повторно-кратковременный режим работы механизмов с частыми пусками S4 по ГОСТ 183: – продолжительностью включений (далее ПВ) до 25 % и но- минальной частотой включения до 630 в час при нагрузке на вы- ходном валу в пределах от номинальной противодействующей до 0,5 номинального значения сопутствующей нагрузки;
– максимальная частота включений – до 1200 в час при ПВ до 5 % (механизмы с крутящим моментом до 250 Н·м включительно). Понижение частоты вращения и увеличение крутящего мо- мента, создаваемых двигателем, осуществляется посредством мно- гоступенчатых цилиндрических зубчатых или комбинированных червячно-зубчатых передач. Валы вращаются на шарикоподшип- никах. Зубчатые передачи и шарикоподшипники смазываются гус- той смазкой, что обеспечивает установку механизма в любом по- ложении в пространстве. Механизмы МЭО оснащаются одним из видов блока сигнали- зации положения выходного вала с датчиком обратной связи (блок датчика): реостатным БСПР; индуктивным БСПИ; токовым БСПТ с унифицированным токовым сигналом 0 – 5, 0 – 20 или 4 – 20 мА по ГОСТ 26.011. В условном обозначении механизма ставятся соот- ветственно буквы Р, И, У. В состав каждого блока сигнализации положений входит два основных узла: блок микропереключателей и блок датчиков. Микропереключатели предназначены для огра- ничения и сигнализации положения выходного вала, расположены компактно и образуют собственно блок концевых выключателей БКВ. В случае отсутствия потребности в датчике обратной связи (при ручном управлении) механизмы оснащаются только блоком концевых выключателей БКВ. В условном обозначении механизма ставится буква М. Управление работой механизмов может быть как контактное при помощи пускателей ПМЛ, так и бесконтактное при помощи пускателей бесконтактных реверсивных ПБР, БУЭР или усилите- лей тиристорных трехпозиционных типа ФЦ. Для оперативного управления МЭО или МЭОФ с пульта или щита управления может использоваться блок управления релейно- го регулятора БУ21. Он предназначен для переключения управле- ния цепями нагрузки с автоматического на ручное или внешнее управление. Кроме того, БУ21 имеет две кнопки «Больше» и «Меньше» с самовозвратом для оперативного управления пере- мещением выходного вала МЭО и МЭОФ в прямом или обратном направлении. Механизмы обеспечивают фиксацию положения выходного вала при отсутствии напряжения питания. Принцип работы механизмов МЭМ заключается в преобра- зовании электрического командного сигнала во вращательное перемещение регулирующего органа механизма в пределах 6–200 об. МЭМ предназначены для перемещения регулирующих и за- порных органов самотормозящейся запорно-регулирующей арма- туры в системах автоматического регулирования технологических процессов в соответствии с командными сигналами, поступающи- ми от регулирующих или исполнительных устройств. МЭМ – механизм, устанавливаемый непосредственно на ар- матуре. Соединение с арматурой – квадратное отверстие на вы- ходном валу. Соединение модифицированного механизма МЭМ-2 с арматурой – кулачковая полумуфта на выходном валу. Управление работой механизмов может осуществляться как контактным способом при помощи электромагнитных пускателей типа ПМЛ, так и бесконтактным способом с помощью пускателей бесконтактных реверсивных ПБР, БУЭР или усилителей тири- сторных ФЦ. В системах автоматического регулирования реко- мендуется использовать бесконтактный способ управления, как более надежный. Принцип работы механизмов МЭП заключается в преобра- зовании электрического командного сигнала в возвратно-посту- пательное перемещение выходного штока РО ИМ с помощью электродвигателя. Принцип работы механизмов МЭПК (моди- фикация прямоходных механизмов) заключается в преобразовании электрического сигнала, поступающего от регулирующего или ис- полняющего устройства, во вращательное перемещение выходного вала привода, а затем через кривошипно-шатунный механизм в возвратно-поступательное перемещение штока РО ИМ. МЭП предназначены для возвратно-поступательного перемеще- ния регулирующих органов запорно-регулирующей арматуры типа «регулирующий клапан», «задвижка» и тому подобное в системах автоматического регулирования технологических процессов. Механизмы устанавливаются непосредственно на арматуре и соединяются со штоком регулирующего органа посредством резьбовой муфты. МЭП часто устанавливаются на трехходовые клапаны (см. рис. 1.9, б) и используются на технологических линиях подачи па- ра, воздуха, в системах холодного и горячего водоснабжения, в системах отопления. Как правило, ЭИМ производства зарубежных компаний, та- ких как Sauter, Danfoss, Belimo, имеют в своем составе контроллер для осуществления так называемых интеллектуальных функций. Среди российских компаний интеллектуализацией ЭИМ плодо- творно в течение более 20 лет занимается ОАО «ЗЭиМ» (г. Чебок- сары). К таким интеллектуальным функциям ИМ относятся: дис- танционное управление ЭИМ сигналами 0 – 10 В, или 0 – 20 мА, пе- редача информации о текущем положении (состоянии) клапана, электронная диагностика и блокировка ЭИМ в случае аварийных ситуаций – механических перегрузок (заклинивание механических элементов), интеграция в информационные сети АСУТП с полно- ценным доступом как по управлению ЭИМ, так и по получению выходной информации о его состоянии и др.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-07-18; просмотров: 601; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.142.101 (0.013 с.) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||