Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Обобщенная функциональная схемаСодержание книги
Поиск на нашем сайте Функциональная схема (функциональная структура) СУИМ, как и любой системы управления [12–23], отражает признаки ее функционально-структурной организации и определяет взаимо- связь, соподчиненность ее функциональных элементов.
В структуре СУИМ выделяют два основных структурных мо- дуля: объект управления и устройство управления (рис. 2.1). Рис. 2.1. Обобщенная функциональная схема системы управления: X з – вектор задающих воздействий; Y – вектор выходных (управляемых) координат; X – вектор координат состояния объекта; F – вектор возмущающих воздействий; X с – вектор контролируемых (наблюдаемых) координат объекта; X в – вектор контролируемых аддитивных воздействий; U – вектор управляющих воздействий Объект управления (ОУ) представляет собой какой-либо тех- нологический процесс или промышленную установку. Рабочие органы исполнительных механизмов ОУ приводятся в движение электроприводами, пневмоприводами или гидроприводами. В качестве устройств оценивания состояния ОУ и возмуще- ния внешней среды могут выступать устройства непосредственно- го измерения координат ОУ и внешней среды (датчики координат) либо устройства косвенного измерения, вычисления значений ко- ординат (наблюдающие устройства). Устройство управления (УУ) представляет собой совокуп- ность регуляторов, фильтров, корректирующих устройств, преоб- разователей координат, обеспечивающих требуемые статические и динамические характеристики СУИМ.
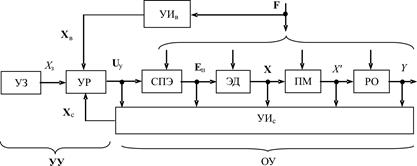
Необходимо отметить, что электромеханические САУ, обла- дая массой преимуществ в сравнении с гидромеханическими и пневмомеханическими системами, нашли наибольшее примене- ние в современных системах автоматизации. Более того, свыше 60 % потребляемой промышленными предприятиями электроэнер- гии приходится на силовые электромеханические приводы (элек- троприводы) производственных установок. На рис. 2.2 рассмотре- на обобщенная функциональная структура простейшей одноуров- невой локальной электромеханической СУИМ (СУЭП). Рис. 2.2. Обобщенная функциональная схема локальной электромеханической системы управления На схеме используются следующие обозначения: УЗ – устройство задания. Формирует задающее воздейст- вие X з изменения выходной координаты ОУ. УР – устройство регулирования, или собственно устройство управления, состоящее из регуляторов, корректирующих звеньев, фильтров, преобразователей координат и т.п. Формирует управ- ляющие воздействия U у, обеспечивая оптимальные динамические и статические характеристики системы в соответствии с заданным критерием качества управления. СПЭ – силовые преобразователи энергии (электромашинные, тиристорные, транзисторные и т.п.). Преобразуют электрическую энергию питающей сети в электромагнитную энергию управления электродвигателем, формируя вектор выходных сигналов E п (для ДПТ – регулируемые напряжения цепей якоря и возбуждения, для АД с короткозамкнутым ротором – регулируемые напряжения или токи и частота питающей сети статора, для СД – регулируемые напряжение и частота питающей сети статора и ток возбуждения и т.п.). ЭД – электродвигатель постоянного или переменного тока. Обеспечивает преобразование подводимой электрической энергии в механическую энергию. X – вектор координат состояния (вектор переменных) электродвигателя (напряжения, токи, электромагнит- ные моменты, частота напряжения обмоток статора, скорость вра- щения или угловое положение вала и др.). ПМ – передаточный механизм (редуктор, ременная, цепная передача и др.). Передает энергию вращения электродвигателя в энергию вращения или поступательного движения рабочего ор- гана (РО) исполнительного механизма (ИМ). X′ – выходная коор- дината передаточного механизма электромеханической СУИМ (линейная или угловая скорость либо линейное или угловое поло- жение ИМ). Исполнительным механизмом ОУ может быть механизм суп- порта токарного станка, шток или штурвал привода задвижки неф- те- или газопровода, схват робота-манипулятора и др. В этом слу- чае суппорт станка, задвижка, центробежный насос представляют собой рабочие органы (РО) ОУ. Y – выходная технологическая координата ОУ (давление газа или жидкости в магистрали, расход газа или жидкости, натяжение нити или полотна, уровень нефти в резервуаре и др.). В чисто электромеханических системах управления (ЭМСУ) выходной ко- ординатой является скорость или положение РО (ЭМСУ металло- режущих станков, промышленных роботов-манипуляторов, элек- трического транспорта и др.). УИс – устройство измерения координат состояния СУИМ, представляющее собой совокупность датчиков внутренних коор- динат состояния ОУ (измеряют напряжения, токи, частоту силово- го питающего напряжения, скорость вращения вала двигателя и ИМ и др.), а также датчика выходной переменной ОУ. Формиру- ет вектор X с сигналов обратных связей по состоянию ОУ. УИв – устройство измерения контролируемых возмущающих воздействий СУИМ (датчики координат, наблюдающие устройст- ва). Формирует вектор X в сигналов компенсирующих связей по возмущению системы управления. Все возмущения, действующие на СУИМ, подразделяются на три вида: – аддитивные – приходят из внешней по отношению к ОУ среды, суммируясь с полезными сигналами (координатами ОУ); к ним относятся отклонения напряжения и частоты питающей сре- ды от номинальных значений, изменение климатических факторов, изменение нагрузки на валу ЭИМ и другие (см. вектор возмуще- ния F на рис. 2.1, 2.2); – мультипликативные – возникают внутри или вне системы, умножаясь на координаты ОУ (обусловлены естественными или искусственными перекрестными связями ОУ и внешней среды); – параметрические – обусловлены временным или темпера- турным дрейфом параметров ОУ, например изменением значений активного сопротивления обмоток двигателя при их нагреве, из- менением приведенного к валу двигателя момента инерции ЭП при изменении параметров кинематической схемы привода (мас- согабаритных параметров ИО, например при обработке заготовки в токарном станке, изменении груза лифта или транспортного ме- ханизма). При синтезе СУИМ, как правило, пренебрегают влиянием внешних возмущений, а при анализе учитывают лишь существен- ные возмущения, действующие на ОУ. Оценка влияния вариаций параметров объекта управления на показатели качества управле- ния – предмет анализа так называемой чувствительности СУИМ к параметрическим возмущениям. Основные функциональные элементы СУИМ (элементную ба- зу) можно разбить на несколько групп: 1) задающие элементы, позволяющие установить заданное значение выходной переменной ОУ (источники эталонного на- пряжения или тока, потенциометры, сельсины и др.); они могут содержать блоки памяти (от уставок реле и напряжений до уст- ройств хранения программ и данных, записанных на магнитных и электронных носителях информации); задающие воздействия на рис. 2.2 обозначены переменной X з; 2) чувствительные элементы, обеспечивающие непосредствен- ное измерение переменных ОУ (датчики координат состояния ОУ); 3) усилительные элементы, служащие для усиления сигналов чувствительных элементов (транзисторные усилители, масштаби- рующие операционные усилители и др.); выходные сигналы уси- лительных элементов на рис. 2.2 обозначены переменной X с; 4) исполнительные элементы, предназначенные для приведе- ния в движение рабочих органов исполнительных механизмов ОУ (электрические двигатели постоянного или переменного тока, пневмоприводы, гидроприводы, электромагнитные приводы); 5) преобразовательные элементы, обеспечивающие преобра- зование входного сигнала (энергии) одного вида или уровня в дру- гой; различают силовые преобразовательные элементы (электро- машинные и полупроводниковые преобразователи постоянного тока для питания обмоток якоря и возбуждения двигателя посто- янного тока, частотные преобразователи для питания статора асинхронного или синхронного двигателя, тиристорные возбуди- тели для питания обмотки возбуждения синхронного двигателя) и преобразователи сигналов информационных каналов СУИМ (преобразователи «частота – напряжение», «частота – код», «на- пряжение – ток» и др.); 6) корректирующие элементы, обеспечивающие изменение статических и динамических свойств СУИМ (фильтрующие эле- менты, дифференцирующие и интегрирующие звенья в прямом или обратном канале регулирования, параметрические регуляторы); 7) блоки связи микропроцессорных средств управления (МСУ) с объектом управления (модули ввода-вывода информации) и иными периферийными устройствами, в частности сетевые ап- паратные средства.
|
||||||||
|
|
Последнее изменение этой страницы: 2021-07-18; просмотров: 406; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.01 с.) |