
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Задача стабилизации скорости вращения электродвигателяСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Объект управления – электрический двигатель постоянного тока. Задача: поддержание угловой скорости w вращения двигателя на заданном уровне w0. Согласно обозначениям, принятым на общей функциональной схеме САУ, здесь z (t) – возмущение (нагрузка на двигатель, момент нагрузки); y (t) º w – выход (угловая скорость вращения); u (t) – вход (напряжение). Математическая модель (уравнение) объекта: w = au – bz, т. е. угловая скорость w пропорционально возрастает с увеличением подаваемого напряжения u и убывает с ростом нагрузки z. 1. Управление по разомкнутому циклу. В этом случае u = u (t). Как получить эту зависимость? Так как
2. Управление по возмущению. z (t) – заранее неизвестна, моментная нагрузка меняется, но мы имеем возможность ее измерить: z ^(t). Отметим, что вообще говоря, z ^(t) ¹ z (t). За управление естественно принять u (t) = (w0 + bz ^)/a Þ w = w0 – b (z – z ^). Ошибка поддержания скорости Dw = b (z–z ^) определяется точностью измерения возмущения. Если измерения абсолютно точны, то Dw = 0. 3. Управление с обратной связью. Управление с отрицательной обратной связью базируется на обработке ошибки e (t) = w0 – w(t). Зададим такую связь:
Это, так называемый, интегральный закон управления: сигнал управления является интегралом от ошибки (отклонения скорости от требуемого значения). Смысл такого управления в следующем: - w = w0, - w(t) > w0, - По идее все правильно, проверим. Напряжение u 0(t) на двигатель, при котором его скорость равна требуемому значению w0, определяется из условия: w0 = au 0(t) – bz (t) Þ w – w0 = a (u – u 0) Þ где u 0– «идеальное» управление, обеспечивающее требуемую скорость w0, D u = u – u 0 – ошибка управления. Далее для простоты рассмотрим случай z (t) = Const (постоянная, но неизвестная величина).
Итак, можно управлять двигателем, практически ничего не зная о нем. w0 ¾ то, что хотим получить; w(t) ¾ измерили; Dw = w0 – w(t) ¾ сформировали. Чтобы решить проблему w(t) ® w0, достаточно взять любые положительные значения k. Таким образом, мало, что зная об объекте, можно им управлять. Однако ничего не бывает даром. Dw(t) ® 0 постепенно (а вот при программном управлении – сразу, но для этого все об объекте нужно знать заранее).
Анализ линейных непрерывных систем автоматического управления Описание САУ Объекты и СУ состоят из элементов различной природы. Описание каждого элемента дается на языке соответствующей научной дисциплины. Например, для механических объектов используются уравнения Лагранжа, Ньютона, для электрических – законы Ома и Кирхгофа, для гидродинамических – уравнения Бернулли, Стокса и т. д. Для анализа свойств системы в теории автоматичеееского управления используется единообразное, стандартное описание. Суть его в следующем: · каждый реальный элемент рассматривается как звено системы, в котором осуществляется преобразование одного процесса (входного воздействия) в другой (выходную реакцию) или просто преобразование "вход ® выход".
u Звено y u – вход; y – выход.
· взаимодействие между звеньями задается путем описания связей между их входами и выходами; эти связи определяют структуру системы.
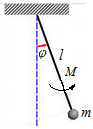
Например, нелинейное уравнение колебаний математического маятника имеет вид
где m – масса «материальной точки»; l –длина подвеса; j – угол поворота подвеса относительно вертикальной оси; M – приложенный момент. Наряду с дифференциальными уравнениями в теории автоматического управления широко используются уравнения состояния. Пространство состояний По характеру реакции на входные воздействия все системы или их отдельные элементы можно разделить на статические и динамические. В статических звеньях выход y (t) определяется только значением входа u (t) в данный момент времени t; все, что было с системой до этого, никакого влияния не оказывает. Такие системы описываются статической характеристикой:
В динамических системах информации о входном воздействии в данный момент недостаточно, чтобы узнать выходной сигнал; также важна и предыстория изменения входа и начальное состояние:
где x (t) – некоторая характеристика, которая называется состоянием системы. Относительно понятия «состояние системы» справедливы следующие утверждения: - состояние системы в данный момент времени содержит всю информацию о системе и позволяет определить ее поведение в будущем; - состояние динамической системы определяется входным процессом и начальным состоянием; - состояние системы определяется не единственным образом, а с точностью до взаимно-однозначного преобразования. Множество X = { x } возможных состояний системы называется пространством состояний. Для непрерывных систем уравнения состояния могут быть представлены в виде системы
Первое уравнение (собственно уравнение состояния) описывает изменение состояния системы во времени в зависимости от начального состояния и входного сигнала и характеризует динамику системы. Второе уравнение (уравнение выхода) устанавливает связь выходного сигнала с текущими значениями состояния и входа; оно является статическим соотношением. Следует иметь в виду, что x (t), y (t) являются векторами, а функции f (), g () – вектор-функциями от векторных аргументов, в общем случае нелинейными. Видим, что уравнение состояния представляется в форме Коши. Рассмотрим в качестве примера описание в пространстве состояний свободных колебаний математического маятника. Математическая модель свободных колебаний имеет вид В пространстве состояний в качестве переменных можно принять:
и уравнение выхода в виде y = x 1. Отметим, что подобный выбор переменных состояния не является единственно возможным.
|
||||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 486; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.188.226.233 (0.012 с.) |



 , u = Const, w = Const = w0.
, u = Const, w = Const = w0.

 ,
, 



 Универсальным языком теоретического естествознания, служащим для моделирования взаимосвязей процессов в природе и технике, является язык дифференциальных уравнений. Любые реальные системы являются нелинейными. Поэтому в общем случае система описывается нелинейным дифференциальным уравнением
Универсальным языком теоретического естествознания, служащим для моделирования взаимосвязей процессов в природе и технике, является язык дифференциальных уравнений. Любые реальные системы являются нелинейными. Поэтому в общем случае система описывается нелинейным дифференциальным уравнением
 y (t) = f (u (t)).
y (t) = f (u (t)). y (t) = S (x (t 0), u [ t 0, t ]),
y (t) = S (x (t 0), u [ t 0, t ]),


 . Тогда получим следующие уравнения состояний:
. Тогда получим следующие уравнения состояний:



