
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Синтез линейных непрерывных систем автоматического управленияСодержание книги
Поиск на нашем сайте
Основные задачи синтеза регуляторов Для создания системы автоматического управления с хорошими статическими и динамическими свойствами необходимо решить следующие основные задачи: · обеспечить устойчивость (стабилизацию) системы с необходимыми запасами устойчивости; · обеспечить требуемую точность регулирования в статическом режиме и нужную степень астатизма; · обеспечить требуемые показатели качества переходных процессов – тип и время переходного процесса, перерегулирование, колебательность и др. В каждом конкретном случае к системе добавляются специфические требования. Например, при проектировании системы автоматического управления промышленным роботом (САУ ПР) приводы по отдельным степеням подвижности должны обеспечивать движение с необходимыми скоростями и ускорениями, «преодолевать» технологическую нагрузку и др. Исходя из требований к статическим и динамическим свойствам системы автоматического управления, следует выбрать оптимальную с точки зрения выбранных критериев структуру САУ, в том числе состав элементов, и определить параметры этих элементов. Выбор осуществляется на основе компромисса между качеством (точностью, быстродействием) системы, с одной стороны, и простотой технической реализации (стоимостью) – с другой. Обеспечение устойчивости и желаемого качества регулирования в системе управления достигается двумя способами. Сначала выбирают функциональные элементы, входящие в состав системы управления, а именно, датчики сигналов, измерительные устройства, усилители мощности, преобразователи сигналов, исполнительные устройства. Они подбираются по специализированным каталогам и справочникам на основе требований к развиваемой мощности, быстродействию, предельным скоростям и ускорениям, допустимым статическим погрешностям, помехоустойчивости. В САУ ПР по заданной максимальной скорости движения и вычисленной максимальной нагрузке определяется потребная мощность, а затем по каталогу подбирается двигатель. Зная номинальную скорость двигателя и требуемую скорость движения нагрузки, подбирают передаточное отношение редуктора. Момент выбранного двигателя должен превышать потребный момент, обусловленный требованиями по заданным ускорениям объекта и величине нагрузки. Поэтому выполняется соответствующая проверка. Далее в процессе синтеза подбираются датчики положения и скорости, усилители, преобразователи и т. д.
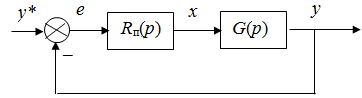
Важно понимать, что улучшение качества системы управления, в первую очередь, связано с оптимизацией свойств самого объекта управления. Свойства объекта должны соответствовать требованиям технического задания и делать решение задачи синтеза принципиально возможным. Если объект либо вообще невозможно изменить, либо он уже был изменен настолько, насколько возможно, но качество системы все еще не удовлетворительно, то остается единственная возможность наделения системы желаемыми свойствами путем введения дополнительных элементов, которые исправляют (корректируют) их в нужном направлении. Корректирующее устройство – это функциональный элемент системы автоматического управления, обеспечивающий ей необходимые свойства: устойчивость и желаемые показатели качества переходных процессов. Коррекция в САУ выполняется с помощью регуляторов. Задача регулятора в узком смысле состоит в выполнении аналоговых, логических и арифметических операций по формированию закона управления, т. е. в чистом виде исполнение функций корректирующего устройства. Регулятором в широком смысле является вся система управления за вычетом объекта. Типы регуляторов и их свойства Последовательный регулятор Последовательный регулятор с передаточной функцией R п(p) (рис. 3.1) включается в прямую цепь системы непосредственно после сравнивающего элемента или после предварительного усилителя.
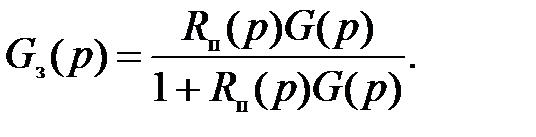
Рис. 3.1. Схема с последовательным регулятором Передаточная функция замкнутой системы с последовательным регулятором равна
Регулятор выбирается так, чтобы обеспечить желаемые свойства системе в целом:
Простейшим корректирующим устройством данного типа является пропорциональный усилитель R п(p) = K п, формирующий пропорциональное (П) управление x (t) = K п e (t). Это позволяет, в частности, уменьшить установившуюся ошибку отработки постоянного воздействия - без пропорционального усилителя e уст = y 0 / (1+ G (0)), - с пропорциональным усилителем e уст = y 0 / (1+ G (0)∙ K п).
Существенным при такой коррекции является то, что при введении производной появляется дополнительный положительный фазовый сдвиг, в результате чего АФХ разомкнутой системы дополнительно разворачивается против часовой стрелки, увеличивая запас устойчивости (по фазе и по амплитуде). Введение производной от ошибки может неустойчивую замкнутую систему сделать устойчивой. G раз(p) = (Tp + 1) G (p), | G раз(i ω)| = (1+ T 2ω2)1/2| G (i ω)|, φ(ω) = φo(ω) + arctg(T ω). При включении в закон управления интеграла ошибки (ПИ-управление) обеспечивается астатизм замкнутой системы и нулевая установившаяся ошибка еуст (t) = 0 отработки постоянного входного воздействия y* (t) = y 0. В практике автоматического управления широко распространены промышленные ПИД-регуляторы с передаточной функцией G (p) = K п+ K и/ p + K д p и настраиваемыми параметрами K п, K и, K д. Применяются и более сложные последовательные корректирующие устройства.
|
||||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 398; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.119.118.237 (0.008 с.) |




 Регулятор может дополнительно использовать производную ошибки регулирования dе (t)/ dt (ПД-управление), что увеличивает запас устойчивости и улучшает качество переходного процесса.
Регулятор может дополнительно использовать производную ошибки регулирования dе (t)/ dt (ПД-управление), что увеличивает запас устойчивости и улучшает качество переходного процесса.


