Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Принципы автоматического управленияСтр 1 из 34Следующая ⇒
ВВЕДЕНИЕ Управление состоит в том, чтобы, оказывая воздействие на объект, изменять протекающие в нем процессы для достижения определенной цели. В любой системе, где есть управление, всегда можно выделить две подсистемы. Первая – это объект управления, то чем управляют. Вторая – это средства управления – устройства, элементы, осуществляющие управление. Управление может быть ручным, полуавтоматическим и автоматическим, в зависимости от степени участия в процессе управления человека-оператора. При ручном управлении функции управления целиком выполняет человек. Автоматическое управление осуществляется без участия человека-оператора с помощью специальных технических устройств. Полуавтоматическое управление – это промежуточный вариант между ручным и автоматическим управлением. Системы, в которых осуществляется автоматическое управление, называются системами автоматического управления (САУ). Теория автоматического управления (ТАУ) занимается разработкой общих принципов создания и функционирования подобных систем. Объекты управления в автоматических системах могут иметь самую разную физическую природу; соответственно разнообразными могут быть и процессы, протекающие в подобных системах. Однако очень важно то, что разнообразные физические процессы могут быть описаны в рамках одних и тех же математических структур (обычно – дифференциальных уравнений). Поэтому ТАУ оперирует не с конкретными техническими описаниями, а с классами математических моделей. Это придает теории автоматического управления внешний облик математической дисциплины. Но по своему содержанию и направленности ТАУ остается технической наукой. Это проявляется при выборе математической модели, приложениях и трактовке получаемых результатов: – модель любого реального объекта обладает специфическими особенностями; без понимания «физики» процессов невозможен выбор и обоснование адекватной математической модели; – любая модель лишь приближенно отражает свойства реального объекта, позволяет только прогнозировать его реакцию на воздействия; поэтому очень важна проверка результатов и их правильная трактовка. Важно понимать, что на практике исходными являются не уравнения, а реальный физический объект и реально используемые технические средства управления.
Несмотря на разнообразие технических проблем, существуют общие подходы, общие принципы создания систем управления.
Принципы автоматического управления Функциональная схема САУ Любая система автоматического управления (САУ) строится из нескольких функциональных блоков: объекта управления, исполнительного устройства, датчика обратной связи и управляющего устройства. Объект управления Объект управления (ОУ) - это физическая система, которой управляют для достижения требуемой цели. Объекты управления могут иметь различную природу. Прежде всего, выделим технические объекты: механические, электротехнические, тепловые. В механических объектах управляемыми являются процессы изменения координат и скоростей, а управляющими воздействиями - внешние силы; цель управления состоит в получении требуемых траекторий (движение инструмента станка ЧПУ, рабочего органа промышленного робота, автомобиля и т. д.). В электротехнических объектах управляют процессами изменения токов, напряжений, мощностей за счет внешних ЭДС, потенциометров, варикапов для обеспечения постоянства напряжений или максимизации мощности. В теплотехнических объектах управляемыми являются процессы изменения температур; воздействия осуществляются путем подвода или отвода тепловой энергии с целью обеспечения заданного распределения температур или стабилизации температуры на определенном уровне. Можно привести примеры управления объектами в других сферах жизнедеятельности: - социально-экономические объекты (цель – повышение уровня жизни; воздействия – рыночные механизмы, валютный курс, уровень инфляции, инвестиции); - военно-политические объекты (цель – мировое или региональное господство; воздействия – использование военной силы, переговоры, экономическое влияние); - биологические объекты, человек (гомеостаз – комплекс защитных реакций организма, направленных на стабилизацию характеристик различных органов и систем при изменении температуры, давления, физических нагрузок и других внешних и внутренних факторов).
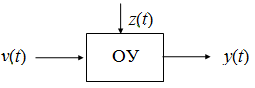
Изображение ОУ на структурной схеме представлено на рис. 1.1.
Рис. 1.1. Обозначение объекта управления (ОУ) на структурной схеме Функциональный объект - в прямоугольнике; v (t), z (t) - входы, Пример ОУ - промышленный робот (ПР, рис. 1.2).
Рис. 1.2 – Схема ПР Цель управления роботом – воспроизведение требуемой траектории движения схвата. v (t) – силы и моменты от приводов степеней подвижности: M j, Fr, Fz; z (t) – технологическая нагрузка, силы и моменты сил трения; y (t) = x c, y c, z c, … - координаты центра схвата и углы его ориентации в пространстве. 1.1.2 Исполнительное устройство (привод) Исполнительное устройство (ИУ, рис. 1.3) предназначено для выработки воздействий, превращения сигнала управления (обычно электрического) в механическое усилие, поток тепла, поток вещества, с помощью которых реализуется управление. На входИУ поступает сигнал u (t) - сигнал управления (электрический сигнал, перемещение заслонки и т. д.), на выходе действует управляющее воздействие v (t).
Рис. 1.3. Обозначение исполнительного устройства Из устройства управления поступает сигнал с низким уровнем мощности. ИУ осуществляет две основные функции: повышение мощности сигнала и преобразование сигнала управления в управляющее воздействие требуемого типа. Первая реализуется усилителями мощности, вторая - двигателями. Общим для любых ИУ является использование энергии от внешних источников (блоков питания электрического тока, напорных установок гидродвигателей, пневмосетей) и ограничение возможного уровня управляющего воздействия конструкцией ИУ. Примеры двигателей 1. Электромагнит – заслонка (рис. 1.4)
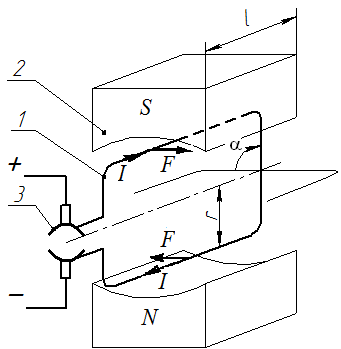
Рис. 1.4. Электромагнит-заслонка Электромагнит – это устройство, которое создает магнитное поле при прохождении электрического тока. Чаще всего магнит выполнен из ферромагнитного сердечника и обмотки. В некоторых типах электрических магнитов может быть якорь, который передает механическое усилие. Обмотка электромагнита выполнена из изолированного медного или алюминиевого провода. Для создания магнитопроводов используют чугун, литую или конструкционную сталь, железокобальтовые или железоникелевые сплавы. Из физики известно, что на проводник с током, помещенный в магнитное поле, действует сила (сила Ампера), величина которой определяется выражением F = B×I×l, (1.1) где В – магнитная индукция поля, Тл (тесла), В∙с/м²; l – длина проводника в поле, м; I – ток, А. Якорь электромагнита перемещается в электромагнитном поле, создаваемом током, протекающим через катушку. За счет этого осуществляется управление заслонкой, следовательно, и подачей рабочей жидкости или газа. 2. Электрический двигатель Наиболее часто в управляемых приводах используются серводвигатели. Они могут быть построены на базе синхронных или асинхронных двигателей, а также двигателей постоянного тока. Принцип действия всех электродвигателей основан на взаимодействии магнитных и электромагнитных полей. Рассмотрим принцип действия на примере электродвигателя постоянного тока. Если в магнитное поле поместить рамку с током, то к ней будет приложен момент (электромагнитный момент), обусловленный парой сил (рис. 1.5).
Рис. 1.5. Рамка с током в электромагнитном поле: 1 – рамка с током; 2 – магнит или электромагнит; 3 – коллектор

где r – расстояние от оси рамки до проводника (плечо); S – площадь рамки в поле, a – угол между направлениями вектора напряженности магнитного поля и вектора тока (угол поворота рамки). Коллектор (механический переключатель) служит для изменения направления тока в рамке в зависимости от положения проводников относительно полюсов магнита. В двигателе постоянного тока много рамок, подобных той, что изображена на рис. 1.5. Каждая рамка представляет собой обмотку, состоящую из нескольких витков. Момент, развиваемый двигателем, равен
где z 1 – число витков в одной рамке; z 2 – число рамок; z – число витков обмотки двигателя. 3. Гидравлический (пневматический) двигатель (рис. 1.6)
Рис. 1.6. Гидродвигатель Гидравлический (или пневматический) двигатель включает два цилиндра – управляющий цилиндр (золотник) и силовой цилиндр, связанный с выходным звеном. Входным управляющим сигналом гидродвигателя является перемещение золотника (штока управляющего цилиндра), открывающего или закрывающего доступ рабочего тела (сжатой жидкости или газа) к движущемуся поршню силового (рабочего) цилиндра. Примеры усилителей 1. Операционный усилитель (рис. 1.7) – это электронный усилитель напряжения с высоким коэффициентом усиления, имеющий дифференциальный вход и обычно один выход. Напряжение на выходе может превышать разность напряжений на входах в сотни или даже тысячи раз.
а б Рис. 1.7. Усилители: а – сумматор, б - интегратор 2. Гидроусилитель (рис. 1.8) Гидроусилитель, по-существу, представляет собой гидродвигатель, в который вводится жесткая связь между валами силового цилиндра и золотника. В результате перемещение поршня силового цилиндра оказывается пропорциональным управляющему перемещению х «рукоятки». Смысл использования устройства – усиление мощности: на рабочем поршне возникают значительные усилия, которые прикладываются к нагрузке.
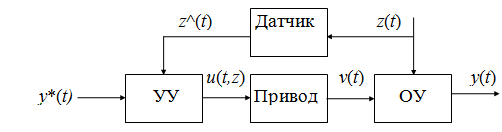
Рис. 1.8. Гидроусилитель Управляющее устройство В управляющем устройстве (УУ, рис. 1.14) на основе информационных сигналов y ^(t) о состоянии объекта управления и априорной информации y *(t) о желаемых свойствах ОУ вырабатываются сигналы управления u (t).
Рис. 1.14. Обозначение управляющего устройства на структурной схеме Правило (алгоритм) преобразования информационных сигналов в сигналы управления называется законом управления. Одной из главных задач ТАУ как раз и является формирование законов управления. В качестве управляющих устройств используются программируемые контроллеры или компьютеры. Использование цифровых управляющих устройств в качестве блока САУ влечет за собой определенные особенности ввода и вывода информации. При вводе текущей информации электрические сигналы (аналогового типа) от датчика масштабируются с помощью усилителей к требуемому диапазону, затем преобразуются в АЦП в кодированную последовательность импульсов и вводятся в память. Результат обработки информации по соответствующим программам в виде цифрового кода поступает на ЦАП, на выходе которого формируется аналоговый сигнал соответствующего напряжения. Как правило, аналого-цифровой преобразователь (АЦП) — электронное устройство, преобразующее аналоговый сигнал (напряжение как непрерывную функцию времени) в двоичный цифровой код. Важными характеристиками АЦП являются разрешение и разрядность. Разрешение АЦП — минимальное изменение величины аналогового сигнала, которое может быть преобразовано данным АЦП. Обычно измеряется в вольтах, поскольку для большинства АЦП входным сигналом является электрическое напряжение. Разрешение напрямую зависит от разрядности АЦП. Разрядность АЦП характеризует количество дискретных значений, которые преобразователь может выдать на выходе; измеряется в битах. Например, АЦП с разрядностью 8 бит, способен выдать 256 дискретных значений (0…255), поскольку 28 = 256. Разрешение по напряжению равно разности напряжений, соответствующих максимальному и минимальному выходному коду, деленной на количество выходных дискретных значений. Например, при диапазоне входных значений от −10 до +10 В и разрядности АЦП 14 бит (214 = 16384 уровней квантования) получаем разрешение по напряжению (10-(-10))/16384 = 20/16384 = 0,00122 В = 1,22 мВ. Цифро-аналоговый преобразователь (ЦАП) — устройство для преобразования цифрового (обычно двоичного) кода в аналоговый сигнал (ток или напряжение). Цифро-аналоговые преобразователи являются интерфейсом между дискретной (числовой) информацией и непрерывными (аналоговыми) сигналами. Наиболее важными характеристиками ЦАП являются разрядность и максимальная частота дискретизации. Разрядность определяет количество различных уровней выходного сигнала, которые ЦАП может воспроизвести. Задается в битах. Например, однобитный ЦАП способен воспроизвести два (21) уровня, а восьмибитный — 256 (28) уровней.Таким образом, количество уровней равно 2 в степени разрядность. Максимальная частота дискретизации — максимальная частота работы ЦАП, на которой он выдает корректный результат. В соответствии с теоремой Котельникова, для правильного воспроизведения аналогового сигнала из цифровой формы необходимо, чтобы частота дискретизации была, по крайней мере, в два раза выше максимальной частоты в спектре сигнала. Например, для воспроизведения всего слышимого человеком звукового диапазона частот, спектр которого простирается до 20 кГц, необходимо, чтобы звуковой сигнал был дискретизован с частотой не менее 40 кГц. Стандарт Audio CD устанавливает частоту дискретизации звукового сигнала 44,1 кГц, в компьютерных звуковых картах частота дискретизации составляет 48 кГц.
Примеры САУ Регулятор уровня воды в паровом котле Иван Иванович Ползунов (1728 – 1766) – знаменитый русский механик, теплотехник, один из изобретателей теплового двигателя, создатель первой в России паросиловой установки. В 1763 г. он разработал проект парового двигателя мощностью 1,8 л. с. (1,3 кВт) — первого в мире двухцилиндрового двигателя с объединением работы цилиндров на один общий вал, т. е. двигателя, универсального по своему техническому применению. Измерительным элементом регулятора Ползунова (рис. 1.16) является поплавок, жестко связанный с заслонкой. При изменении уровня воды поплавок поднимается (или опускается). При этом заслонка закрывает (или открывает) доступ жидкости в котел до тех пор, пока не будет восстановлен ее требуемый уровень.
Рис. 1.16. Регулятор Ползунова Регулятор скорости вращения турбины Джеймс Уатт (1736 – 1819) — шотландский инженер, изобретатель-механик. Его именем названа единица мощности – Ватт. Усовершенствовал и в несколько раз увеличил производительность паровой машины, сделал ее легко управляемой. Широко известен регулятор Уатта (рис. 1.17).
Рис. 1.17. Регулятор Уатта: 1 - турбина; 2 - шары; 3 - золотник; 4 - силовой цилиндр; 5 - заслонка Принцип работы регулятора Уатта заключается в следующем. Отклонение угловой скорости вращения турбины 1 от номинального значения приводит к изменению центробежной силы, действующей на шары 2, вследствие чего они расходятся (при увеличении скорости) или сходятся (при ее снижении). При изменении положения шаров происходит перемещение каретки, которая с помощью гидроусилителя (3, 4) двигает (открывает или закрывает) заслонку 5, изменяя поток воды или пара, падающего на турбину.
Электромеханическая следящая система Электромеханическая следящая система (ЭСС, рис. 1.18) используется для точного автоматического воспроизведения заданных перемещений, поворотов, траекторий.
Рис. 1.18. Электромеханическая следящая система Объект управления ЭСС - вращающийся вал 1, нагруженный внешним моментом. Цель управления - обеспечить поворот исполнительного вала 1 в соответствии с поворотом задающего вала 2 (момент на валу 1 не должен влиять на вал 2; иначе было бы достаточно просто связать валы 1 и 2 кинематической связью). Датчики Д1 и Д2 измеряют угловое положение управляемого вала 1 и задающего вала 2 соответственно. Эти значения сравниваются и разность (ошибка углового положения вала 1) усиливается по уровню на операционном усилителе УН, а затем по мощности на усилителе мощности УМ. Усиленный сигнал подается на исполнительный двигатель. Электродвигатель через редуктор Р передает на управляемый вал управляющее воздействие (вращающий момент), которое «компенсирует» ошибку, в результате чего управляемый вал «догоняет» задающий вал
Потенциометрическая следящая система Потенциометрическая следящая система (рис. 1.19) содержит входной (задающий) и выходной (отрабатывающий или исполнительный) потенциометры, усилитель и сервомотор.
Рис. 1.19. Потенциометрическая следящая система Если Х вых ¹ Х вх, то uвых ¹ uвх и на операционном усилителе выделяется разность напряжений Du = uвх – uвых или ошибка (рассогласование). Сигнал Du усиливается, корректируется в соответствии с используемым законом управления, и двигатель перемещает движок отрабатывающего потенциометра в сторону уменьшения ошибки до нуля. При реверсе движка задающего потенциометра знак ошибки меняется на противоположный, сервомотор перемещает движок отрабатывающего потенциометра в противоположном направлении. Промышленный робот Промышленный робот (ПР) - система, состоящая из манипулятора и блока управления (контроллера). Манипулятор - механическая конструкция, предназначенная для перемещения и ориентации схвата внутри рабочей зоны. Задача управления ПР - сложное пространственное движение, определяемое перемещением звеньев относительно друг друга. Схема функционирования ПР выглядит следующим образом. От оптических датчиков (системы "технического зрения") или датчиков других типов в блок управления поступает информация о текущем положении, координатах и ориентации детали, находящейся в схвате ПР. В контроллере хранится информация о требуемом или исходном состоянии схвата. По специальной программе в контроллере вычисляются необходимые перемещения и углы поворота по различным степеням подвижности для перемещения схвата в требуемое положение. Результаты вычислений преобразуются в сигналы управления, передаваемые в блоки управления звеньями. Каждый из блоков может работать по схеме ЭСС.
Принципы управления Качественный смысл работы любой системы автоматического управления всегда один и тот же: необходимо выбрать управляющее воздействие так, чтобы объект вел себя желательным образом; идеальный вариант, когда при выбранном управлении отсутствует ошибка, т. е. сигнал e (t) = y *(t) – y (t) º 0. Такие системы называют инвариантными. Каковы возможности достижения этой цели? Оказывается, что существуют некоторые общие принципы, согласно которым функционируют любые САУ независимо от характера протекающих в них процессов. 1.3.1 Программное управление При программном управлении система (рис. 1.20) строится без датчика, т. е. обратная связь отсутствует. Это, так называемая, разомкнутая система (нет связи входа с выходом). Сигнал управления u (t) рассчитывается только как функция времени, ничто другое на его определение не влияет.
Рис. 1.20. Схема программного управления Чтобы грамотно рассчитать сигнал управления u (t), необходимо хорошо знать не только свойства ОУ и привода, но также и характер изменения возмущения во времени. Это обязательно для пересчета (компенсации) возмущения z (t) в управляющий сигнал v (t). Принцип хорош своей простотой, но может быть использован лишь тогда, когда все известно заранее. Важно понять, что даже следование идеально рассчитанной программе может не дать эффективного решения для реальных объектов. Дело в том, что при расчете программы опираются на математические модели, использующие оценки параметров системы и внешних факторов; любые неточности могут привести к ошибкам и даже к неработоспособности систем с управлением по разомкнутому циклу.
1.3.2 Управление по возмущению (принцип Понселе) В систему (рис. 1.21) вводится датчик, измеряющий возмущение. Измеренное возмущение учитывается в управляющем устройстве:
Рис. 1.21. Схема управления по возмущению Такие измерения можно эффективно использовать, однако есть и недостатки. Например, при неточной компенсации возмущений ошибки могут неограниченно возрастать. Комбинированное управление Комбинированное управление представляет собой сочетание двух различных принципов управления. Пример - управление полетом исследовательского космического аппарата. Полет осуществляется по рассчитанной заранее траектории (без обратной связи) с коррекцией траектории в определенных точках, например при пролете около планеты (управление по рассогласованию). Описание САУ Объекты и СУ состоят из элементов различной природы. Описание каждого элемента дается на языке соответствующей научной дисциплины. Например, для механических объектов используются уравнения Лагранжа, Ньютона, для электрических – законы Ома и Кирхгофа, для гидродинамических – уравнения Бернулли, Стокса и т. д. Для анализа свойств системы в теории автоматичеееского управления используется единообразное, стандартное описание. Суть его в следующем: · каждый реальный элемент рассматривается как звено системы, в котором осуществляется преобразование одного процесса (входного воздействия) в другой (выходную реакцию) или просто преобразование "вход ® выход".
u Звено y u – вход; y – выход.
· взаимодействие между звеньями задается путем описания связей между их входами и выходами; эти связи определяют структуру системы.
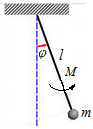
Например, нелинейное уравнение колебаний математического маятника имеет вид
где m – масса «материальной точки»; l –длина подвеса; j – угол поворота подвеса относительно вертикальной оси; M – приложенный момент. Наряду с дифференциальными уравнениями в теории автоматического управления широко используются уравнения состояния. Пространство состояний По характеру реакции на входные воздействия все системы или их отдельные элементы можно разделить на статические и динамические. В статических звеньях выход y (t) определяется только значением входа u (t) в данный момент времени t; все, что было с системой до этого, никакого влияния не оказывает. Такие системы описываются статической характеристикой:
В динамических системах информации о входном воздействии в данный момент недостаточно, чтобы узнать выходной сигнал; также важна и предыстория изменения входа и начальное состояние:
где x (t) – некоторая характеристика, которая называется состоянием системы. Относительно понятия «состояние системы» справедливы следующие утверждения: - состояние системы в данный момент времени содержит всю информацию о системе и позволяет определить ее поведение в будущем; - состояние динамической системы определяется входным процессом и начальным состоянием; - состояние системы определяется не единственным образом, а с точностью до взаимно-однозначного преобразования. Множество X = { x } возможных состояний системы называется пространством состояний. Для непрерывных систем уравнения состояния могут быть представлены в виде системы
Первое уравнение (собственно уравнение состояния) описывает изменение состояния системы во времени в зависимости от начального состояния и входного сигнала и характеризует динамику системы. Второе уравнение (уравнение выхода) устанавливает связь выходного сигнала с текущими значениями состояния и входа; оно является статическим соотношением. Следует иметь в виду, что x (t), y (t) являются векторами, а функции f (), g () – вектор-функциями от векторных аргументов, в общем случае нелинейными. Видим, что уравнение состояния представляется в форме Коши. Рассмотрим в качестве примера описание в пространстве состояний свободных колебаний математического маятника. Математическая модель свободных колебаний имеет вид В пространстве состояний в качестве переменных можно принять:
и уравнение выхода в виде y = x 1. Отметим, что подобный выбор переменных состояния не является единственно возможным. Многоконтурные системы Для многоконтурных систем используется принцип последовательного упрощения, заключающийся в замене части структурной схемы одним элементом. При определении передаточной функции такого элемента используются формулы элементарных структурных преобразований. Возможны два варианта: непересекающиеся (вложенные) контуры и пересекающиеся. В первом случае все достаточно ясно. Последовательно сворачивают внутренние контуры, заменяя внутренний контур одним звеном с эквивалентной передаточной функцией.
Рис. 2.26. Пример схемы с вложенным контуром В случае пересечения контуров их необходимо "развязывать" (избавляться от пересечений). Возможности для этого дают элементарные структурные преобразования: перенос линии связи за звено, перестановка сумматоров и т. п. Перемена местами линий связи
Рис. 2.27. Перемена местами линий связи Перемена местами сумматоров
Рис. 2.28. Перемена местами сумматоров Перенос линии связи за звено
Рис. 2.29. Перенос линии связи за звено Перенос сумматора за звено
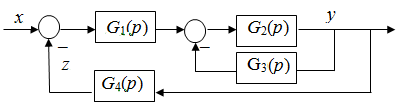
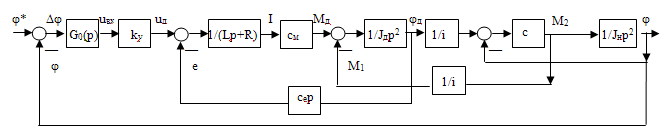
Рис. 2.30. Перенос сумматора за звено Пример. Структурные преобразования для ЭМС.
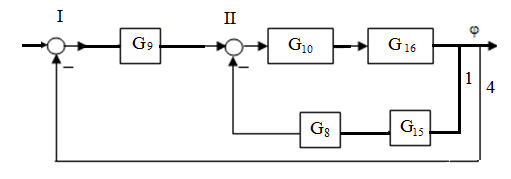
Рис. 2.31. Структурная схема ЭМС 1. Для определения передаточной функции оставляем только одно интересующее нас входное воздействие (например, для определения G j/j*(p) оставляем только j*), остальные убираем.
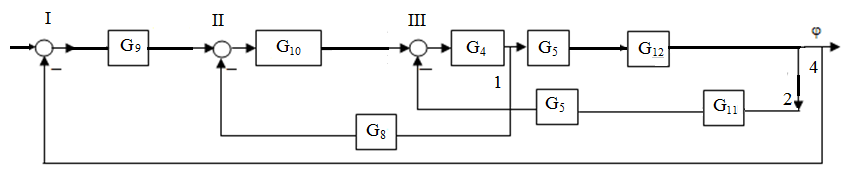
2. Для удобства перерисовываем схему
3. Заменяем последовательно соединенные звенья: G0 и G1 – на G9 = G0×G1, G2 и G3 – на G10= G2×G3.
4. Переносим линию связи 2 за звено G7 (появляется звено G11=1/G7), меняем местами линии связи 2 и 3.
5. Сворачиваем контур с сумматором IV: G12=G6G7(1+G6G7).
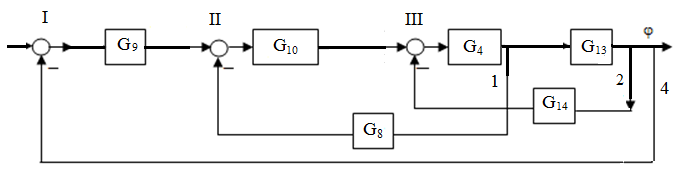
6. Заменяем последовательно соединенные звенья: G5 и G12 – на G13, G5 и G11 – на G14.
7. Переносим линию связи 1 за звено G13 (G15=1/ G13), меняем местами линии связи 1 и 2.
7. Сворачиваем контур с сумматором III: G16=G4G13/(1+G4G13G14).
8. Сворачиваем контур с сумматором II: G17=G10G16/(1+G10G16G8G15). 9. Искомая передаточная функция равна G j/j*=G9G17/(1+G9G17). Понятие устойчивости Понятие устойчивости системы характеризует способность возвращаться в состояние равновесия (или заданного движения) после прекращения действия внешних сил, которые вывели ее из этого состояния. Устойчивость положения равновесия. Пусть у * — положение равновесия, а y (t) — текущее значение координаты (процесса). Положение равновесия называется устойчивым, если рассогласование D y (t) = y (t) - y * с течением времени будет стремиться к нулю. Ниже представлена механическая аналогия (рис. 2.34).
Рис. 2.34. Положение равновесия Если устойчивость положения равновесия наблюдается при любых начальных условиях, то говорят об устойчивости «в большом». Под устойчивостью «в малом» понимается соблюдение условия D y (t) ® 0 при t ® ¥ в малой e-окрестности положения равновесия. Понятие устойчивости можно распространить и на случай движения. Пусть заданное (невозмущенное) движение определяется законом y *(t). Приложение внешних сил к системе вызовет отклонение действительного (возмущенного) движения (рис. 2.35) от заданного: y ^(t) ¹ y *(t). Заданное невозмущенное движение будет устойчивым, если возникающее в результате приложения внешних сил возмущенное движение по истечении некоторого времени после снятия этих сил будет стремиться к заданному (т. е. система выйдет на прежнюю траекторию): D y (t) = y (t) – y *(t) ® 0 при t ® ¥.
Рис. 2.35. Возмущенное движение Исследование устойчивости «в большом» является предметом теории нелинейных систем. Устойчивость «в малом» исследуется на линеаризованных моделях. В линейных системах свойство устойчивости от величины внешних воздействий не зависит. Не зависит устойчивость линейных систем и от начальных условий. Устойчивость является внутренним свойством системы и определяется только ее параметрами. Рассмотрим линейную систему, описываемую дифференциальным уравнением: a 0 y (n) + a 1 y (n -1) + a 2 y (n -2) +...+ any = b 0 x (m) + b 1 x (m -1) + +...+ bmx (2.49) Невозмущенное движение является одним из возможных, поэтому a 0 y* (n) + a 1 y* (n -1) + a 2 y* (n -2) +...+ any* = b 0 x (m) + b 1 x (m -1) +...+ bmx (2.50) Вычитая (2.49) – (2.50), получим для определения D y (t) (а значит и для исследования устойчивости) линейное однородное дифференциальное уравнение с постоянными коэффициентами: a 0D y (n) + a 1D y (n -1) + a 2D y (n -2) +...+ an D y = 0 (2.51) Решение уравнения имеет вид D y (t) = S Сiexp (l it) и для определения l i следует решить уравнение Q (l) = a 0l n + a 1l n -1 + a 2l n -2 +...+ an = 0 (2.52) Это уравнение называется характеристическим уравнением системы, а полином Q (l) называется характеристическим полиномом системы. Коэффициенты Сi — постоянные, определяемые начальными условиями. Для устойчивости системы при любых начальных условиях (для любых Сi) должно выполняться условие D y (t) ® 0 Итак, необходимое и достаточное условие устойчивости системы: все корни характеристического уравнения должны иметь отрицательную вещественную часть. На практике для исследования устойчивости вместо решения характеристического уравнения и определения знаков его корней используют критерии устойчивости: алгебраические и частотные. Критерии устойчивости – это некие правила, позволяющие судить об устойчивости систем. Алгебраические критерии устойчивости используют для этой цели значения коэффициентов характеристического уравнения системы, частотные критерии — частотные характеристики. Запасы устойчивости При работе с реальными системами требуется определенная гарантия того, что система будет устойчива не только при рассчитанных значениях параметров, но и при их изменении в некоторых пределах. Дело в том, что используемая для исследования устойчивости математическая модель является упрощенной; могут изменяться параметры объекта управления и системы управления в процессе эксплуатации (старение элементов, нестабильность свойств); сказываются нелинейные эффекты и т. д. Поэтому для гарантии работоспособности САУ необходимо структуру и параметры выбрать таким образом, чтобы обеспечить запасы устойчивости. Конечно, о запасах устойчивости можно говорить только для устойчивых систем. Запасы устойчивости характеризуются «удаленностью от опасных зон». Вводят две меры (рис. 2.46):
Рис. 2.46. Определение запасов устойчивости 1). Запас устойчивости по амплитуде D А – наименьшее значение абсолютной величины ЛАХ на частотах, где ЛФХ пересекает уровни –p±2p k. 2). Запас устойчивости по фазе Dj – наименьшее из отклонений ЛФХ от уровней –p±2p k на частотах, где ЛАХ равна нулю.
|
|||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 1736; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.116.51.117 (0.147 с.) |



 ;
; (1.3)
(1.3)









 Универсальным языком теоретического естествознания, служащим для моделирования взаимосвязей процессов в природе и технике, является язык дифференциальных уравнений. Любые реальные системы являются нелинейными. Поэтому в общем случае система описывается нелинейным дифференциальным уравнением
Универсальным языком теоретического естествознания, служащим для моделирования взаимосвязей процессов в природе и технике, является язык дифференциальных уравнений. Любые реальные системы являются нелинейными. Поэтому в общем случае система описывается нелинейным дифференциальным уравнением
 y (t) = f (u (t)).
y (t) = f (u (t)). y (t) = S (x (t 0), u [ t 0, t ]),
y (t) = S (x (t 0), u [ t 0, t ]),


 . Тогда получим следующие уравнения состояний:
. Тогда получим следующие уравнения состояний: