Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Типовая структурная схема САУ
На типовой структурной схеме САУ (рис. 1.15) можно выделить две основные части: информационную и энергетическую. Информационная часть осуществляет получение, хранение, обработку и выдачу информации, энергетическая – преобразует сигналы управления в управляющее воздействие на объект.
Рис. 1.15. Типовая структурная схема САУ Примеры САУ Регулятор уровня воды в паровом котле Иван Иванович Ползунов (1728 – 1766) – знаменитый русский механик, теплотехник, один из изобретателей теплового двигателя, создатель первой в России паросиловой установки. В 1763 г. он разработал проект парового двигателя мощностью 1,8 л. с. (1,3 кВт) — первого в мире двухцилиндрового двигателя с объединением работы цилиндров на один общий вал, т. е. двигателя, универсального по своему техническому применению. Измерительным элементом регулятора Ползунова (рис. 1.16) является поплавок, жестко связанный с заслонкой. При изменении уровня воды поплавок поднимается (или опускается). При этом заслонка закрывает (или открывает) доступ жидкости в котел до тех пор, пока не будет восстановлен ее требуемый уровень.
Рис. 1.16. Регулятор Ползунова Регулятор скорости вращения турбины Джеймс Уатт (1736 – 1819) — шотландский инженер, изобретатель-механик. Его именем названа единица мощности – Ватт. Усовершенствовал и в несколько раз увеличил производительность паровой машины, сделал ее легко управляемой. Широко известен регулятор Уатта (рис. 1.17).
Рис. 1.17. Регулятор Уатта: 1 - турбина; 2 - шары; 3 - золотник; 4 - силовой цилиндр; 5 - заслонка Принцип работы регулятора Уатта заключается в следующем. Отклонение угловой скорости вращения турбины 1 от номинального значения приводит к изменению центробежной силы, действующей на шары 2, вследствие чего они расходятся (при увеличении скорости) или сходятся (при ее снижении). При изменении положения шаров происходит перемещение каретки, которая с помощью гидроусилителя (3, 4) двигает (открывает или закрывает) заслонку 5, изменяя поток воды или пара, падающего на турбину.
Электромеханическая следящая система Электромеханическая следящая система (ЭСС, рис. 1.18) используется для точного автоматического воспроизведения заданных перемещений, поворотов, траекторий.
Рис. 1.18. Электромеханическая следящая система Объект управления ЭСС - вращающийся вал 1, нагруженный внешним моментом. Цель управления - обеспечить поворот исполнительного вала 1 в соответствии с поворотом задающего вала 2 (момент на валу 1 не должен влиять на вал 2; иначе было бы достаточно просто связать валы 1 и 2 кинематической связью). Датчики Д1 и Д2 измеряют угловое положение управляемого вала 1 и задающего вала 2 соответственно. Эти значения сравниваются и разность (ошибка углового положения вала 1) усиливается по уровню на операционном усилителе УН, а затем по мощности на усилителе мощности УМ. Усиленный сигнал подается на исполнительный двигатель. Электродвигатель через редуктор Р передает на управляемый вал управляющее воздействие (вращающий момент), которое «компенсирует» ошибку, в результате чего управляемый вал «догоняет» задающий вал
Потенциометрическая следящая система Потенциометрическая следящая система (рис. 1.19) содержит входной (задающий) и выходной (отрабатывающий или исполнительный) потенциометры, усилитель и сервомотор.
Рис. 1.19. Потенциометрическая следящая система Если Х вых ¹ Х вх, то uвых ¹ uвх и на операционном усилителе выделяется разность напряжений Du = uвх – uвых или ошибка (рассогласование). Сигнал Du усиливается, корректируется в соответствии с используемым законом управления, и двигатель перемещает движок отрабатывающего потенциометра в сторону уменьшения ошибки до нуля. При реверсе движка задающего потенциометра знак ошибки меняется на противоположный, сервомотор перемещает движок отрабатывающего потенциометра в противоположном направлении. Промышленный робот Промышленный робот (ПР) - система, состоящая из манипулятора и блока управления (контроллера). Манипулятор - механическая конструкция, предназначенная для перемещения и ориентации схвата внутри рабочей зоны. Задача управления ПР - сложное пространственное движение, определяемое перемещением звеньев относительно друг друга. Схема функционирования ПР выглядит следующим образом. От оптических датчиков (системы "технического зрения") или датчиков других типов в блок управления поступает информация о текущем положении, координатах и ориентации детали, находящейся в схвате ПР. В контроллере хранится информация о требуемом или исходном состоянии схвата. По специальной программе в контроллере вычисляются необходимые перемещения и углы поворота по различным степеням подвижности для перемещения схвата в требуемое положение. Результаты вычислений преобразуются в сигналы управления, передаваемые в блоки управления звеньями. Каждый из блоков может работать по схеме ЭСС.
Принципы управления Качественный смысл работы любой системы автоматического управления всегда один и тот же: необходимо выбрать управляющее воздействие так, чтобы объект вел себя желательным образом; идеальный вариант, когда при выбранном управлении отсутствует ошибка, т. е. сигнал e (t) = y *(t) – y (t) º 0. Такие системы называют инвариантными. Каковы возможности достижения этой цели? Оказывается, что существуют некоторые общие принципы, согласно которым функционируют любые САУ независимо от характера протекающих в них процессов. 1.3.1 Программное управление При программном управлении система (рис. 1.20) строится без датчика, т. е. обратная связь отсутствует. Это, так называемая, разомкнутая система (нет связи входа с выходом). Сигнал управления u (t) рассчитывается только как функция времени, ничто другое на его определение не влияет.
Рис. 1.20. Схема программного управления Чтобы грамотно рассчитать сигнал управления u (t), необходимо хорошо знать не только свойства ОУ и привода, но также и характер изменения возмущения во времени. Это обязательно для пересчета (компенсации) возмущения z (t) в управляющий сигнал v (t). Принцип хорош своей простотой, но может быть использован лишь тогда, когда все известно заранее. Важно понять, что даже следование идеально рассчитанной программе может не дать эффективного решения для реальных объектов. Дело в том, что при расчете программы опираются на математические модели, использующие оценки параметров системы и внешних факторов; любые неточности могут привести к ошибкам и даже к неработоспособности систем с управлением по разомкнутому циклу.
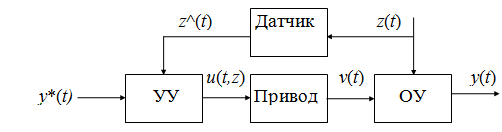
1.3.2 Управление по возмущению (принцип Понселе) В систему (рис. 1.21) вводится датчик, измеряющий возмущение. Измеренное возмущение учитывается в управляющем устройстве:
Рис. 1.21. Схема управления по возмущению Такие измерения можно эффективно использовать, однако есть и недостатки. Например, при неточной компенсации возмущений ошибки могут неограниченно возрастать.
|
||||||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 1052; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.129.249.105 (0.009 с.) |