
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Синтез систем управления методом логарифмических частотных характеристик
Одним из основных, наиболее часто используемых методов синтеза линейных систем является метод, основанный на использовании асимптотических логарифмических частотных характеристик разомкнутой системы. С одной стороны, свойства системы автоматического управления полностью определяются частотными характеристиками ее разомкнутого контура, с другой стороны, эти характеристики легко строятся. Этот метод может быть применен даже при отсутствии математического описания отдельных элементов объекта. Тогда используются экспериментально снятые частотные характеристики этих элементов или разомкнутой системы в целом. Исходными данными при проектировании являются передаточная функция G (p) объекта без регулятора (располагаемой системы) или экспериментально снятые частотные характеристики объекта и желаемые требования к объекту: - коэффициенты ошибок регулирования по положению, скорости и производным высших порядков; - время переходного процесса t пп; - перерегулирование s; - запасы устойчивости по амплитуде D A и фазе Dj. Методика синтеза последовательного регулятора по логарифмическим частотным характеристикам включает в себя следующие этапы: · построение асимптотических ЛЧХ располагаемой системы; · построение асимптотических ЛЧХ желаемой разомкнутой системы (рис. 3.8);
Рис. 3.8. Желаемая ЛАХ · определение асимптотических ЛЧХ регулятора; · построение передаточной функции регулятора; · построение переходной характеристики синтезированной замкнутой системы; · проверка соответствия полученной системы заданным требованиям; · техническая реализация регулятора. Блок-схема алгоритма синтеза представлена на рис. 3.9.
начало
G (p) D A, Dj, s, t пп, ci …
L р(w)= L ж(w)– L (w) jр(w)=jж(w)–j(w)
R (p)
h (t), L (w)
св-ва достигнуты?
техническая реализация регулятора
конец
Рис. 3.9. Блок-схема алгоритма синтеза регулятора методом ЛАХ Методика синтеза последовательного регулятора основана на соотношениях
в которых индекс «ж» обозначает желаемые передаточную функцию и частотные характеристики разомкнутого контура, и на зависимости свойств замкнутой системы от характеристик разомкнутой.
Характеристики регулятора получают путем графического вычитания
Передаточную функцию регулятора R (p) восстанавливают по его частотным характеристикам. На первом этапе строятся асимптотические логарифмические частотные характеристики L (w) и j(w), соответствующие передаточной функции G (p) разомкнутой системы (располагаемой, без регулятора). Построение может быть выполнено теоретическими методами на основе математической модели или экспериментально. Наиболее сложным является второй этап формализации желаемых свойств замкнутой системы в форме желаемых логарифмических частотных характеристик L ж(w) и jж(w) разомкнутой системы. Их формирование выполняется по-разному в разных частотных диапазонах. Низкочастотная часть желаемой амплитудной характеристики в интервале частот 0 £w £ wн должна иметь наклон 0 или –20∙ m дБ/дек, где m – требуемая степень астатизма системы, и отсекать на оси L желаемое значение Lж (1), определяемое по общему коэффициенту усиления желаемой разомкнутой системы. Подробнее об определении этого коэффициента, а также других параметров желаемой характеристики речь идет ниже. Среднечастотная часть желаемой амплитудной характеристики в интервале частот wс £ w £ wв должна иметь наклон –20 дБ/дек (или в отдельных случаях –40 дБ/дек) и пересекать ось w на желаемой частоте среза wср. Низко- и среднечастотная части амплитудно-частотной характеристики соединяются в интервале частот wн < w < wс сопрягающей частью c наклоном –40 дБ/дек или –60 дБ/дек. Высокочастотная часть желаемой амплитудной характеристики при w > wв должна иметь отрицательный наклон от –40 дБ/дек и более, так как она предназначена для максимального ослабления влияния высокочастотных шумов на работу системы управления (а для этого должна быстро убывать по величине с увеличением частоты). При формировании желаемой амплитудно-частотной характеристики необходимо стремиться максимально совмещать частоты сопряжения асимптотических характеристик L (w) и L ж(w), чтобы упростить структуру регулятора, исключив лишние типовые звенья в его передаточной функции R (p) = G ж(p)/ G (p).
L р(w) = L ж(w) – L (w), jр(w) = jж(w) – j(w) определяются логарифмические характеристики последовательного регулятора. Эта операция выполняется достаточно просто, так как на отдельных участках сводится к вычитанию углов наклона прямых, кратных 20 дБ/дек. По этим характеристикам на четвертом этапе восстанавливаются типовые звенья и передаточная функция регулятора R (p) по следующей методике: · начальному низкочастотному участку характеристики L р(w) с наклоном асимптоты ±20 m 0 дБ/дек соответствует начальное типовое звено с передаточной функцией · двигаясь слева направо по оси w, фиксируем частоты сопряжения w i асимптотической амплитудной характеристики L р(w). Каждому изменению ее наклона на ±20 дБ/дек соответствует типовое звено регулятора с передаточной функцией
(символ Å означает знак «+» для минимально-фазовых звеньев и знак «–» – для неминимально-фазовых). · составляем из типовых звеньев Ri (p) передаточную функцию регулятора
На пятом этапе проектирования регулятора получают фактические показатели качества замкнутой системы путем вычисления ее передаточной функции G ж(p) и построения переходной характеристики
На шестом этапе статические и динамические свойства переходной характеристики сравниваются с желаемыми. Если в процессе проектирования желаемые свойства замкнутой системы достигнуты, то на седьмом этапе выполняется техническая реализация полученной передаточной функции регулятора: • последовательный регулятор преобразуется к желаемому типу или к комбинации регуляторов разных типов; • разрабатывается техническое устройство, реализующее регулятор в требуемой элементной базе. Если требуемые свойства замкнутой системы не достигнуты, желаемые логарифмические частотные характеристики корректируются, а цикл проектирования повторяется со второго этапа. Главные достоинства расчета регулятора методом логарифмических частотных характеристик заключаются в использовании кусочно-линейных асимптотических характеристик, которые легко и быстро строятся по передаточной функции и так же быстро позволяют восстановить передаточную функцию по логарифмическим характеристикам. Применение номограмм позволяет исключить решение нелинейных уравнений для определения параметров желаемой ЛАХ. Пример. Для объекта с передаточной функцией
рассчитать последовательный регулятор, дающий замкнутой системе астатизм первого порядка с предельной ошибкой отработки заданного линейного сигнала, не превышающей 10 % скорости его изменения, показателями качества t пп £ 2 с, s £ 20 % и запасами устойчивости Решение. Сначала строим асимптотические логарифмические характеристики объекта L (w) и j(w) (рис. 3.10). Затем сформируем желаемую ЛАХ (L ж).
Рис. 3.10. Логарифмические частотные характеристики · Начальный участок желаемой асимптотической ЛАХ имеет наклон –20 дБ/дек, так как система должна быть астатической. · Установившаяся ошибка отработки линейного сигнала
e уст(t) = c 1 v £ 0,1 v Þ c 1 £ 0,1. Отсюда получаем требование на выбор общего коэффициента усиления разомкнутой системы c 1 = 1/ К Þ К = 1/ c 1 ³ 10 Þ L ж(1) ³ 20 дБ. · Влево от точки (1, 20) проводим пунктиром низкочастотную асимптоту амплитудной характеристики с наклоном –20 дБ/дек. · Частота среза wср выбирается по заданным показателям качества переходного процесса t пп и s с помощью номограмм t ппwср(U mах/ U 0) и s(U mах/ U 0), (рис. 3.11).

Рис. 3.11 – Номограммы для определения характеристик U mахи U 0 – максимальное и начальное значения вещественной частотной характеристики замкнутой системы U з(w) = Re G з(i w), задающие аргумент U mах/ U 0, имеющий вспомогательный характер. Последовательность применения номограмм показана стрелками: • по желаемому перерегулированию s(%) находим аргумент U mах/ U 0 и соответствующее ему произведение t пwср времени переходного процесса t п на частоту среза wср; • деля это произведение на желаемое время переходного процесса t пп (с), получим частоту среза wср; s = 20%, t ппwср»2,5p»8, wср = 2,5p/ t пп» 4 1/с. • по номограммам Dj(U mах/ U 0) и L с, L в(U mах/ U 0) оцениваются запас устойчивости по фазе Dj (запас по амплитуде полагается равным 6 дБ) и минимальные значения краевых амплитуд L с = L ж(wс) и L в = L ж(wв). Из соотношений
можно определить границы среднечастотного диапазона:
По номограмме определяем минимальные значения амплитуд
· Через точку (wср, 0) проводим среднечастотную асимптоту также с наклоном –20 дБ/дек. · Так как низкочастотная и среднечастотная части Lж (w) не пересекаются, то нужна сопрягающая часть с наклоном –40 дБ/дек. Чтобы выражение для передаточной функции регулятора (а значит и сам регулятор) было проще, следует, по возможности, совмещать сопрягающие частоты желаемой ЛАХ с сопрягающими частотами ЛАХ объекта. Поэтому совместим левую границу wн характеристики L ж(w) с частотой сопряжения асимптоты амплитудной характеристики объекта w2 = 0,1 1/с. Тогда сопрягающая и среднечастотная асимптоты пересекутся на частоте wc = 0,25 1/с Þ Т c = 4 с, что удовлетворяет условию на wc. · Выберем частоту wв = 40 1/с > 30 1/с сопряжения среднечастотной и высокочастотной асимптот желаемой амплитудной характеристики Lж (w), откуда Т в = 0, 025 с.
· По асимптотическим характеристикам Lж (w), j ж (w) восстановим передаточную функцию желаемого разомкнутого контура
· Рассчитаем реальные показатели качества полученной замкнутой системы по переходной характеристике
Эта характеристика имеет апериодический характер, перерегулирование s = 2,8% < 20%, быстродействие t пп = 0,6 с < 2 с и нулевую статическую ошибку eуст = 0 (рис. 3.12).
Рис. 3.12. Переходная характеристика желаемой системы По логарифмическим частотным характеристикам желаемого разомкнутого контура определяем запас устойчивости по фазе Желаемые свойства замкнутой системы достигнуты. Вычисляем коэффициент статического усиления K p = K ж /K = 0,05 и передаточную функцию последовательного регулятора
Рис. 3.13. Принципиальная схема корректирующего устройства Для первого усилителя:
Для второго усилителя:
Для третьего усилителя:
Синтез ПИД-регулятора Свойства ПИД-регулятора В промышленных системах управления широко используются трехканальные ПИД-регуляторы благодаря простой структуре и реализации, легкости настройки (не требующей глубокого знания теории автоматического управления), возможности применения с широким классом объектов управления. Выход ПИД-регулятора 1. Усиленного в K праз сигнала ошибки (рассогласования e (t) между уставкой y *(t) и реальным значением выхода y (t)) – пропорциональный канал. 2. Усиленного в K и раз интеграла от сигнала ошибки – интегральный канал. 3. Усиленной в K д производной по времени от сигнала ошибки – дифференциальный канал.
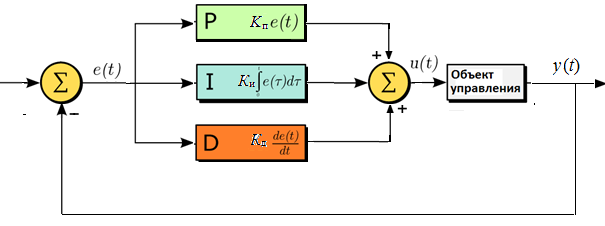
Рис. 3.14. Структурная схема ПИД-регулятора ПИД-регулятор включается между входом объекта управления
Поскольку ПИД-регулятор представляет собой линейное звено, то для него можно записать передаточную функцию
Как видно из (3.23) и (3.24), поведение ПИД-регулятора зависит от трех чисел: коэффициентов K п, K и, K д (или K п, Т и, Т д) – лишь три параметра являются независимыми, а два оставшихся определяются с помощью уравнений связи. Таким образом, задача настройки ПИД-регулятора состоит в подборе таких коэффициентов K п, K и, K д, чтобы добиться устойчивости системы с замкнутой обратной связью и обеспечить заданные характеристики регулирования. В зависимости от знаков и величины параметров К п, К и и К д на основе ПИД-регулятора могут быть построены различные виды регуляторов (рис. 3.15). Например, при неотрицательных К п, К и и К д, кроме тривиального пропорционального управления (К и = К д = 0), имеем: · изодромный ПИ-регулятор (К д = 0, рис. 3.15, а); · ПД-регулятор (К и=0, рис. 3.15, б); · регулятор с двумя форсирующими звеньями (К 2п>4 К и К д, · регулятор с форсирующим звеном 2-го порядка (К 2п<4 К и К д,
Пропорциональный канал управления ПИД-регулятора является базовым и обеспечивает стабилизацию системы, подавление возмущений и компенсацию неопределенности модели. Теоретически, пропорциональный регулятор может управлять объектами с моделями первого порядка без возмущений. При наличии возмущений или неточностей модели объекта управления пропорциональный регулятор обычно также позволяет решать базовые задачи управления, но при этом приходится применять большие значения коэффициента К п. На практике это следует делать с осторожностью, поскольку большое значение К п может привести к усилению шума датчика обратной связи и потери устойчивости.
Интегральный канал используется для достижения высокой точности управления и позволяет уменьшить пропорциональную составляющую регулятора, сохранив при этом точность. Интегральный канал необходим при воздействии аддитивных возмущений на объект управления. Однако при добавлении интегральной составляющей может уменьшиться запас устойчивости системы и появиться перерегулирование. Дифференциальная составляющая позволяет управлять производной выхода объекта управления. Если объект управления представляет собой систему второго порядка (в частном случае, является двойным интегратором), то дифференциальная составляющая обычно необходима. Поскольку реализация дифференциатора представляет собой фильтр высоких частот, то ее применение всегда увеличивает шум в управляющих воздействиях. Дифференциатор значительно усиливает шум датчика обратной связи, который обычно имеет высокочастотный спектр. Однако наличие этой составляющей благоприятно сказывается на увеличении запаса устойчивости системы. С позиций частотного анализа влияние различных составляющих ПИД-регулятора на ЛАЧХ регулятора L р(w) проявляется в следующем. · Пропорциональная составляющая К п задает минимально возможный уровень усиления сигнала ошибки e (t), что доказывает АЧХ ПИД-регулятора
Увеличение модуля коэффициента пропорционального усиления К п поднимает среднечастотную часть амплитудной характеристики L р(w), что влечет аналогичный подъем в этом же частотном диапазоне амплитудной характеристики разомкнутой системы L раз(w) и сдвиг вправо ее частоты среза. Если не нарушаются запасы устойчивости, то такой прием позволяет повысить быстродействие замкнутой системы, расширяет полосу пропускания, снижает установившуюся ошибку. Отметим, что при этом проявляются и побочные отрицательные эффекты в виде некоторого роста перерегулирования и колебательности из-за приближения к границе устойчивости. · Включение в состав регулятора интегральной составляющей К и/ р увеличивает порядок астатизма разомкнутого контура на единицу. При этом для статического объекта управления в устойчивой замкнутой системе ошибка стабилизации постоянного входного воздействия с течением времени придет к нулю. Точнее, канал интегрального управления объектом с порядком астатизма n за счет интегральной составляющей обеспечивает нулевую установившуюся невязку слежения за полиномиальной уставкой n -ой степени. Увеличение коэффициента интегрального усиления К и поднимает низкочастотную часть амплитудной характеристики L р(w) и разомкнутой системы в целом. · Дифференциальная составляющая регулятора К д р предназначена для подъема фазовой характеристики разомкнутого контура в средне- и высокочастотном диапазонах с целью устранения неустойчивости замкнутой системы либо для увеличения запаса устойчивости по фазе. Увеличение коэффициента К д поднимает высокочастотную часть амплитудной характеристики L р(w). В результате увеличиваются запасы устойчивости, уменьшается колебательность и форсируется переходный процесс замкнутой системы. Следует заметить, что теоретически ПИД-регулятор может быть использован только для объектов управления, описываемых моделями не более второго порядка. Однако, поскольку на практике в большинстве случаев встречаются именно такие объекты, ПИД-регуляторы применяются почти повсеместно. Возможны различные варианты определения коэффициентов K п, K и, K д: 1. Ручная настройка ПИД-регулятора, при которой параметры K п, K и, K д выбираются на основе эмпирических правил по результатам моделирования и испытания системы управления. 2. Вычисление коэффициентов ПИД-регулятора на основе желаемого вида передаточной функции и метода неопределенных коэффициентов. 3. Графо-аналитический метод, основанный на использовании логарифмических частотных характеристик. 4. Оптимизационный метод с использованием компьютерных процедур. Настройка ПИД-регулятора Самым простым способом определения параметров ПИД-регулятора является использование следующей стратегии. 1. Обнуляются все коэффициенты K п= 0, K и = 0, K д = 0, что равнозначно отключению ПИД-регулятора от объекта управления. 2. Добиваются повторения на выходе объекта управления единичного ступенчатого сигнала y *(t) = 1, т. е. максимально точного выполнения соотношения y (t)» y *. Для этого постепенно увеличивают коэффициент K п, постоянно проверяя реакцию на ступенчатое воздействие, до тех пор, пока на выходе 3. Устанавливают окончательное значение коэффициента 4. Качество регулирования можно улучшить, изменяя коэффициенты K ии K д: если установившаяся ошибка слишком велика, то необходимо немного увеличить K и; если имеет место значительное перерегулирование – увеличить K д. В целом, ручной подбор параметров ПИД-регулятора включает в себя целенаправленное изменение параметров регулятора до тех пор, пока качество управления не будет удовлетворять заданным критериям. 3.4.3 Параметрический синтез ПИД-регулятора Рассмотрим аналитический метод синтеза коэффициентов ПИД-регулятора. Для начала решим задачу в общем виде, далее применим полученный результат к системе сервопривода. Пусть
отсюда
Интересно отметить, что согласно (3.27) передаточная функция регулятора в явном виде использует инверсию передаточной функции объекта управления G раз(p) Иными словами, регулятор — это некоторая инверсия объекта управления. Пусть объект управления G раз(p) представляет собой систему второго порядка вида
В качестве желаемой передаточной функции системы с замкнутой обратной связью выберем звено первого порядка
поскольку оно обеспечивает наиболее простое и обычно желаемое поведение системы с регулятором. Параметр Непосредственной подстановкой (3.28) и (3.29) в (3.27) можно показать, что
Сравнивая (3.30) с (3.24), можно записать выражения для коэффициентов ПИД-регулятора
Поскольку передаточная функция, задаваемая уравнениями модели сервопривода, имеет вид
то можно записать коэффициенты
а также коэффициенты ПИД-регулятора
3.4.4 Оптимизационный синтез регулятора с помощью программного модуля Simulink Design Optimization Математически оптимизационный синтез регулятора может быть сформулирован как задача численной минимизации функции вида
где В Simulink встроено средство Simulink Design Optimization, которое позволяет решать задачи синтеза регуляторов для линейных и нелинейных систем на основе задачи оптимизации параметров регулятора. Для синтеза регулятора с помощью графического интерфейса Simulink Design Optimization необходимо: – задать входной сигнал, например единичное ступенчатое воздействие, – задать требования к сигналу на выходе объекта управления, который получается как реакция на входное воздействие, – запустить процесс оптимизации выбранных параметров регулятора. При оптимизации параметров модели программное обеспечение изменяет значения параметров модели, чтобы удовлетворить указанные пользователем требования к качеству регулирования. На каждой итерации процесса оптимизации программа моделирует систему, и метод оптимизации (по умолчанию градиентный спуск, но можно выбирать и другие) изменяет параметры регулятора с целью уменьшить расстояние между полученной в результате моделирования реакцией системы на выходе и кусочно-линейными спецификациями допустимых границ выходного сигнала.
|
||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 785; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 52.15.63.145 (0.088 с.) |



 L р(w) = L ж(w) – L (w), jр(w) = jж(w) – j(w).
L р(w) = L ж(w) – L (w), jр(w) = jж(w) – j(w). На третьем этапе графическим вычитанием
На третьем этапе графическим вычитанием Коэффициент усиления
Коэффициент усиления  определяем по координате L р(1), отсекаемой на оси L низкочастотной асимптотой графика L р(w) или ее продолжением;
определяем по координате L р(1), отсекаемой на оси L низкочастотной асимптотой графика L р(w) или ее продолжением;







 .
.



 Теперь можно сконструировать принципиальную схему корректирующего устройства на операционных усилителях (рис. 3.13).
Теперь можно сконструировать принципиальную схему корректирующего устройства на операционных усилителях (рис. 3.13).







 и сигналом ошибки
и сигналом ошибки  , где y * – уставка выходного сигнала. Уравнение выхода ПИД-регулятора
, где y * – уставка выходного сигнала. Уравнение выхода ПИД-регулятора  , как зависимость от сигнала ошибки
, как зависимость от сигнала ошибки  , записывается в виде
, записывается в виде








 не начнутся колебания, – это критическое значение коэффициента
не начнутся колебания, – это критическое значение коэффициента  .
. .
. (p) – передаточная функция объекта управления (заданной системы, без регулятора и обратной связи),
(p) – передаточная функция объекта управления (заданной системы, без регулятора и обратной связи),  – желаемая передаточная функция системы с замкнутой обратной связью, R (p) – передаточная функция ПИД-регулятора вида (3.24). После замыкания отрицательной обратной связи и подключения ПИД-регулятора (как на рис. 3.14), передаточная функция всей системы запишется в виде
– желаемая передаточная функция системы с замкнутой обратной связью, R (p) – передаточная функция ПИД-регулятора вида (3.24). После замыкания отрицательной обратной связи и подключения ПИД-регулятора (как на рис. 3.14), передаточная функция всей системы запишется в виде
 ,
,


 .
.
 ,
, задает постоянную времени переходного процесса, которая выбирается пользователем.
задает постоянную времени переходного процесса, которая выбирается пользователем.
 .
.


 ,
,





 – вектор параметров регулятора, для которых осуществляется подбор оптимальных значений, в данном случае
– вектор параметров регулятора, для которых осуществляется подбор оптимальных значений, в данном случае  ;
;  – выходной сигнал объекта управления в системе с настраиваемым регулятором;
– выходной сигнал объекта управления в системе с настраиваемым регулятором;  – желаемый выходной сигнал;
– желаемый выходной сигнал; – продолжительность моделируемого интервала времени работы системы.
– продолжительность моделируемого интервала времени работы системы.


