
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Основные характеристики графовСодержание книги
Поиск на нашем сайте
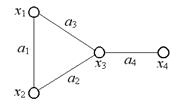
Первая работа по теории графов принадлежащая Эйлеру, появилась в 1736 году. Вначале эта теория была связана с математическими головоломками и играми. Однако впоследствии теория графов стала использоваться в топологии, алгебре, теории чисел. В наше время теория графов находит применение в самых разнообразных областях науки, техники и практической деятельности. Она используется при проектировании электрических сетей, планировании транспортных перевозок, построении молекулярных схем. Применяется теория графов также в экономике, психологии, социологии, биологии. ГрафG - это математический объект, состоящий из множества вершинX = { x 1, x 2,..., xn } и множества реберA = { a 1, a 2,..., an }. Таким образом, граф полностью определяется совокупностью множеств X, A: G = (X, A). Для многих задач несущественно, являются ли ребра отрезками прямых или криволинейными дугами; важно лишь то, какие вершины соединяет каждое ребро. Если ребрам графа приданы направления от одной вершины к другой, то такой граф называется ориентированным. Ребра ориентированного графа называются дугами. Соответствующие вершины ориентированного графа называют началом и концом. Если направления ребер не указываются, то граф называется неориентированным (или просто графом). Пример 3.1. На рис. 3.1 изображен неориентированный граф G = (X, A). X = { x 1, x 2, x 3, x 4}, A = { a 1 = (x 1, x 2), a 2 = (x 2, x 3), a 3 = (x 1, x 3), a 4 = (x 3, x 4)}.
Рис. 3.1. Пример 3.2. На рис. 3.2. изображен ориентированный граф G = (X, A). X = { x 1, x 2, x 3, x 4}, A = { a 1= (x 1, x 2), a 2= (x 1, x 3), a 3= (x 3, x 4), a 4= (x 3, x 2)}.
Рис. 3.2. Граф, имеющий как ориентированные, так и неориентированные ребра, называется смешанным. Различные ребра могут соединять одну и ту же пару вершин. Такие ребра называют кратными. Граф, содержащий кратные ребра, называется мультиграфом. Неориентированное ребро графа эквивалентно двум противоположно направленным дугам, соединяющим те же самые вершины. Ребро может соединять вершину саму с собой. Такое ребро называется петлей. Граф с кратными ребрами и петлями называется псевдографом. Множество ребер графа может быть пустым. Множество вершин графа не может быть пустым. Пример 3.3. На рис. 3.3. изображен ориентированный граф G = (X, A). X = { x 1, x 2, x 3, x 4}, A =
Ри c. 3.3. Как в случае ориентированного, так и в случае неориентированного ребра говорят, что вершины x и yинцидентны ребру a, если эти вершины соединены a. Две вершины называются смежными, если они инцидентны одному и тому же ребру. Два ребра называются смежными, если они имеют общую вершину. Степенью вершины графа называется число ребер, инцидентных этой вершине. Вершина, имеющая степень 0, называется изолированной, а степень 1 – висячей. Для ориентированного графа множество вершин, в которые ведут дуги, исходящие из вершины х, обозначают G (х), то есть G (х) = { y: (x y) Пример 3.4. В графе, изображенном на рис. 3.1, концами ребра a 1являются вершины x 1, x 2; вершина x 2инцидентна ребрам a 1, a 2; степень вершины x 3равна3; вершины x 1и x 3смежные; ребра a 1и a 2смежные; вершина x 4висячая. В ориентированном графе, изображенном на рис. 3.2, началом дуги a 1является вершина x 1, а ее концом - вершина x 2; вершина x 1инцидентна дугам a 1и a 2; G (x 1) = { x 2, x 3}, G (x 2) = Æ, G- 1(x 3) = { x 1}, G- 1(x 1) = Æ. Подграфом неориентированного графа G называется граф, все вершины и ребра которого содержатся среди вершин и ребер графа G. Аналогично определяется подграф ориентированного графа. Подграф называется собственным, если он отличен от самого графа, Граф G = (X, A)- полный, если для любой пары вершин xi и xj существует ребро (xi, xj). Граф G = (X, A)- симметрический, если для любой дуги (xi, xj) существует противоположно ориентированная дуга(xj, xi). Граф G = (X, A) - планарный, если он может быть изображен на плоскости так, что не будет пересекающихся дуг. Неориентированный граф G = (X, A)– двудольный, если множество его вершин X можно разбить на два такие подмножества X 1и X 2, что каждое ребро имеет один конец в X 1, а другой в X 2.
2. Матричные способы задания графов Для алгебраического задания графов используются матрицы смежности и инцидентности. Матрица смежностиA = ( aij)определяется одинаково для ориентированного и неориентированного графов. Это квадратная матрица порядка n, где n - число вершин, у которой
Пример 3.5. Матрица смежности графа, изображенного на рис. 3.1, имеет вид: A = Пример 3.6. Матрица смежности ориентированного графа, изображенного на рис. 3.2, имеет вид: A = Матрица смежности полностью задает граф. Матрицей инцидентностиB = (bij) ориентированного графа называется прямоугольная матрица (n ´ m), где n – число вершин, m – число ребер, у которой bi = Для неориентированного графа матрица инцидентности B задается следующим образом: bi = Пример 3.7. Матрица инцидентности графа, изображенного на рис. 3.1, имеет вид: B = Пример 3.8. Матрица инцидентности ориентированного графа, изображенного на рис. 3.2, имеет вид: B = Матрица инцидентности, также, как и матрица смежности, полностью задает граф. Матрицы смежности и инцидентности удобны для задания графов на ЭВМ.
Основные свойства матриц смежности и инцидентности 1. Матрица смежности неориентированного графа является симметричной. Для ориентированного графа это, вообще говоря, неверно. 2. Сумма элементов i - ой строки или i -го столбца матрицы смежности неориентированного графа равна степени вершины xi. 3. Сумма элементов i - ой строки матрицы смежности ориентированного графа равна числу дуг, исходящих из xi. 4. Сумма элементов i - го столбца матрицы смежности ориентированного графа равна числу дуг, входящих в вершину xi. 5. Сумма строк матрицы инцидентности ориентированного графа является нулевой строкой.
Итак, возможны следующие различные способы задания графа: а) посредством графического изображения; б) указанием множества вершин и множества ребер (дуг); в) матрицей смежности; г) матрицей инцидентности.
Изоморфизм графов Графы G 1= (X 1, A 1)и G 2= (X 2, A 2) изоморфны, если существует взаимно однозначное соответствие между множествами вершин X 1и X 2, такое, что любые две вершины одного графа соединены тогда и только тогда, когда соответствующие вершины соединены в другом графе. Пример 3.9 Графы, изображенные на рис. 3.4 являются изоморфными.
Рис. 3.4
Изоморфные графы отличаются только нумерацией вершин. Матрицы смежности двух изоморфных графов могут быть получены одна из другой перестановкой строк и столбцов. Чтобы узнать, являются ли два графа изоморфными, нужно произвести все возможные перестановки строк и столбцов матрицы смежности одного из графов. Если после какой-нибудь перестановки получится матрица смежности второго графа, то эти графы изоморфны. Чтобы убедиться, что графы неизоморфны, надо выполнить все n! возможных перестановок строк и столбцов.
Лекция 18.2 «Маршруты, циклы, пути в графах» Учебные вопросы: 1. Маршруты, циклы, пути, контуры в графах 2. Экстремальные пути в графах 3. Деревья
|
||||
|
|
Последнее изменение этой страницы: 2016-12-15; просмотров: 1021; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.227.13.119 (0.006 с.) |


 .
.
 G }. Множество G (x) называют образом вершины x. Соответственно G- 1(у)– множество вершин, из которых исходят дуги, ведущие в вершину у, G- 1(y)= { x: (x, y)
G }. Множество G (x) называют образом вершины x. Соответственно G- 1(у)– множество вершин, из которых исходят дуги, ведущие в вершину у, G- 1(y)= { x: (x, y)  aij =
aij = 










