
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Нестационарные режимы транспортных потоковСодержание книги
Поиск на нашем сайте Движение АТ-потоков нестационарно в силу многих обстоятельств:
На рис. 5.5 представлены фазовые «портреты» в координатах
Рис. 5.5. Фазовые «портреты» легкового АТС: а — разгон с переключением передач и последующим торможением двигателем; б — движение в городских условиях; значительнее потери энергии. Если размах колебаний ускорения укладывается в узкую полосу около нуля (например, В силу маневрирования АТС по полосам поток перемешивается. Процесс перемешивания траекторий элементов потока моделируется с помощью матрицы перемешивания. В каждой
Увеличение размытости матрицы характеризует возрастание доли маневров АТС в потоке с большими энергозатратами на движение. Поведение потока на перекрестке моделируется с помощью матрицы перераспределения потоков: строки соответствуют входам на перекресток, а столбцы — выходам. Преодоление перекрестков характеризуется большой диссипацией энергии
Рис. 5.6. Варианты обобщения ^-территории: а — со стыковкой входов-выходов соседних клеток; б — с передачей мощностей АТ-потоком. Разводка потоков носит партионный характер с дискретным управлением со стороны системы УДД. Подходя к перекрестку, АТС перестраиваются. Замедление потока характеризуется диссипацией энергии торможения. Ожидание сигнала светофора зеленого цвета сопровождается выбросом энергии без совершения полезной работы. Следствием маневрирования АТС на перекрестке является малая производительность АТ-потока. Ускорение потоков на выходе также характеризуется повышенной диссипацией энергии. Эти потери неизбежны. Средствами повышения энергоэффективности АТ-потоков на сети является совершенствование УДС и системы УДД. Модель расчета энергетических показателей потоков на больших УДС, будучи построена на базе приведенных представлений, потребовала бы большого числа уравнений и их параметров. Одним из путей упрощения сетевых моделей является клеточное моделирование [18]. Идея этого метода заключается в том, что /^-территория с линеаризованным графом УДС подвергается регулярному клеточному разбиению на А-клетки. Для каждой у4-клетки рассчитывается вектор
|
||
|
|
Последнее изменение этой страницы: 2016-04-26; просмотров: 384; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.108 (0.006 с.) |

 легкового автомобиля для случаев его разгона и последующего торможения двигателем (рис. 5.5, а аналогичен рис. 4.36), а также движения по городской магистрали (рис. 5.5, б). Чем больше ускорение
легкового автомобиля для случаев его разгона и последующего торможения двигателем (рис. 5.5, а аналогичен рис. 4.36), а также движения по городской магистрали (рис. 5.5, б). Чем больше ускорение  тем выше степень нестационарности и
тем выше степень нестационарности и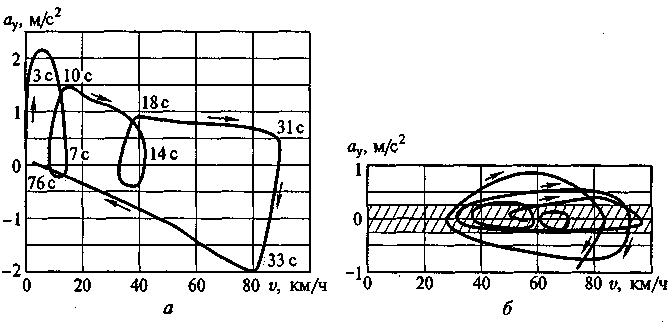
 — зона квазистационарного процесса; стрелками показано направление движения по траектории изменения вектора состояния
— зона квазистационарного процесса; стрелками показано направление движения по траектории изменения вектора состояния < 0,2 м/с2), то процесс называют квазистационарным и для его анализа применяют методы оценки стационарных энергетических процессов.
< 0,2 м/с2), то процесс называют квазистационарным и для его анализа применяют методы оценки стационарных энергетических процессов. строке этой матрицы располагаются либо числа случаев перехода объекта в другие состояния, либо статистические доли. При перемешивании АТ-потока по полосам дороги состоянию объекта отвечает номер полосы. Ниже даны два условных примера потока на фрагменте трехполосной дороги (первый — без перемешивания, второй — с перемешиванием):
строке этой матрицы располагаются либо числа случаев перехода объекта в другие состояния, либо статистические доли. При перемешивании АТ-потока по полосам дороги состоянию объекта отвечает номер полосы. Ниже даны два условных примера потока на фрагменте трехполосной дороги (первый — без перемешивания, второй — с перемешиванием):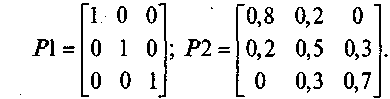
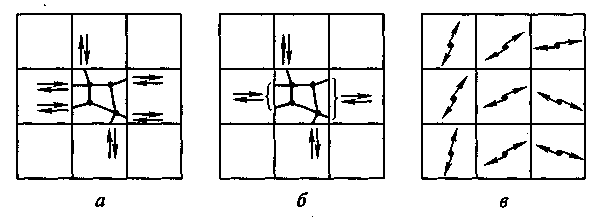
 по граням клеток; в — в виде поля
по граням клеток; в — в виде поля характеризующий интенсивность и направленность движения множества ТС на клетке, а также определяются составляющие
характеризующий интенсивность и направленность движения множества ТС на клетке, а также определяются составляющие  вектора
вектора  по каждой из четырех граней клетки. Абстрагируясь от внутренней структуры Л-клетки, ее можно представить как элемент ^-территории с множеством входов-выходов на границах и распределением интенсивностей по этим входам-выходам. Поскольку вся территория состоит из множества примыкающих друг к другу клеток, то передача интенсивностей производится по стыкующимся входам-выходам соседних клеток (рис. 5.6, а) или интегрированно для каждой грани (рис. 5.6, б). Каждая А-клетка может быть представлена и как полевой элемент с вектором
по каждой из четырех граней клетки. Абстрагируясь от внутренней структуры Л-клетки, ее можно представить как элемент ^-территории с множеством входов-выходов на границах и распределением интенсивностей по этим входам-выходам. Поскольку вся территория состоит из множества примыкающих друг к другу клеток, то передача интенсивностей производится по стыкующимся входам-выходам соседних клеток (рис. 5.6, а) или интегрированно для каждой грани (рис. 5.6, б). Каждая А-клетка может быть представлена и как полевой элемент с вектором  , играющим роль напряженности поля. По этим векторам можно построить силовые линии транспортного поля агломерации (см. рис. 5.6, б).
, играющим роль напряженности поля. По этим векторам можно построить силовые линии транспортного поля агломерации (см. рис. 5.6, б).


