Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Система передачи сигнала отклонения курса в автопилот.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Для выдачи сигналов отклонения самолета от заданного направления полета в канал курса автопилота в ГПК предусмотрены потенциометрический датчик, электромагнитная муфта и арретир. Электромагнитная муфта со щеткой потенциометра свободно сидит на оси, жестко связанной с внешней рамкой гироскопа. Когда не подается питание на электромагнит (положение «выключено») под действием возвратной пружины ролик давит на эксцентрик, который разворачивается вокруг своей оси до тех пор, пока ролик не западет в паз. В этот момент муфта заарретирована и щетка потенциометра находится напротив среднего отвода, т.е. занимает нулевое положение. Так как одновременно с электромагнитом эксцентрика обесточивается и электромагнитная муфта, то эксцентрик, жестко связанный с ней «отлипает» от диска, жестко связанного с внешней рамой гироскопа. Таким образом, когда электромагнит и электромагнитная муфта обесточены, щетка потенциометра центрируется при помощи возвратной пружины, эксцентрика и рамки. При установке переключателя на пульте управления автопилота в положение ГПК подается питание на электромагнит электромагнитной муфты, последняя срабатывает, электромагнит втягивает шток, преодолевая усилие возвратной пружины. Под действием этого ролик выходит из паза, и под действием электромагнитной муфты щетка потенциометра вместе с эксцентриком и самой муфтой притягивается к диску, жестко связанному с внешней рамой гироскопа. Таким образом, щетка потенциометра жестко связывается с осью. В момент, когда срабатывает электромагнит электромагнитной муфты, направление полета считается заданным для автопилота. Если самолет отклонится от заданного курса, то вместе с самолетом и корпусом прибора переместится потенциометр относительно щетки. Между щеткой и средним отводом снимается сигнал ΔΨ, который подается в автопилот. Автопилот возвращает самолет на заданный курс и потенциометр занимает свое исходное положение относительно щетки.
Пульт управления ГПК-52ПУ. На лицевой стороне пульта управления расположены: · Рукоятка задатчика курса · Шкала географической широты. Поворотом рукоятки задатчика курса вправо или влево шкала компаса приводится во вращение. Причем с увеличением угла отклонения рукоятки от нулевого положения возрастает угловая скорость вращения шкалы до 180°.
Угловая скорость вращения шкалы поворотом ЗК на 60° _____ 30÷95°/м до упора______180 °/м
Установка широты осуществляется по индексу и шкале, проградуированной по закону синуса. В пульте управления смонтированы два потенциометра, широтный и поправочный (небаланса), спаренные следующим образом: внутри полой оси одного потенциометра, на которой укреплен движок, пропущена ось другого потенциометра, на которой также укреплен движок. Оба потенциометра включены в цепь переменного тока напряжением 36В 400Гц.
В корпусе потенциометра укреплен штуцер с отверстием, через которое проходит ось с ползунком. На оси широтного потенциометра укреплена ручка со шкалой, на которой имеются деления от 0 до 90 с оцифровкой через 10. На панели ПУ имеется треугольный индекс с надписью «ШИРОТА». Движки потенциометров соединены между собой через управляющую обмотку двигателя азимутальной коррекции и создают вместе с ней диагональ электрического моста, образованного широтным и поправочным потенциометрами. При установке рукояткой необходимой широты места повернется связанный с ней и движок потенциометра. Равновесие электрического моста нарушится и по управляющей обмотке двигателя азимутальной коррекции потечет ток. Двигатель создает момент относительно оси внутренней рамы карданова подвеса гироскопа.
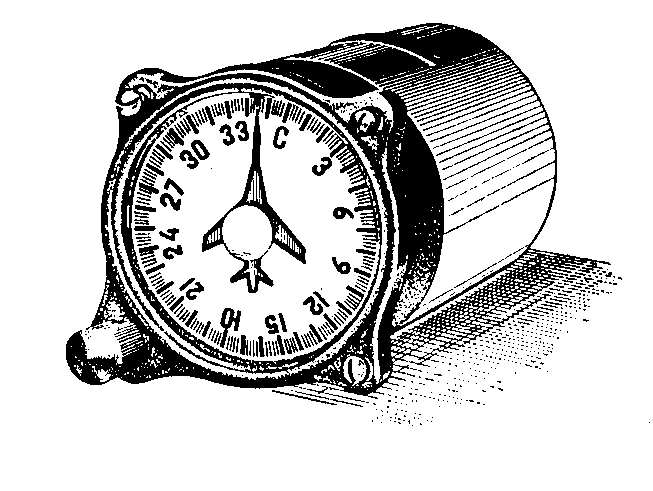
Задатчик курса ЗК-2. Задатчик курса ЗК-2 предназначен для индикации курса ГПК-52АП и выдачи сигнала заданного курса в автопилот АП-28Л1 для разворотов самолета.
По принципу действия задатчик курса представляет собой: -следящую систему для отработки сигналов курса, получаемых с гиродатчика ГПК; ---электромеханическую схему формирования электрического сигнала заданного курса (угла) разворота самолета.
Сельсинная следящая система состоит из сельсина-датчика курса, ротор которого жестко связан с внешней осью карданова подвеса, сельсина-приемника указателя, усилителя, двигателя ДИД-0.5 и редуктора. При разворотах самолета следящая система рассогласовывается, с ротора сельсина-приемника снимается сигнал рассогласования, который поступает на вход усилителя, далее на управляющую обмотку двухфазного индукционного двигателя ДИД-0.5, который через редуктор отрабатывает ротор сельсина-приемника, стрелку (силуэт самолета) и щетку потенциометра до согласованного положения.
При работе ГПК с автопилотом при вводе заданного курса разворота кремальерой разворачивают статор сельсина-приемника относительно ротора. Следящая система, отрабатывая это рассогласование, разворачивает силуэт самолета относительно шкалы прибора и неподвижного индекса, одновременно выдавая сигнал на разворот с потенциометра в автопилот. С помощью автопилота самолет развернется на угол, заданный потенциометром, а следящая система, реагируя на разворот самолета, вернет силуэт самолета в положение, при котором он совпадает с неподвижным индексом и по шкале покажет курс полета. Ошибки ГПК-52АП.
|
||||||
|
|
Последнее изменение этой страницы: 2016-12-27; просмотров: 814; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.119.138.12 (0.01 с.) |