Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Основные элементы агрегата управления.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Каналы курса крена, тангажа: - трансформатор ТР1 служит для согласования выходного сопротивления СП с сопротивлением нагрузки; - преобразователь П2 сигналов переменного тока, пропорциональных углу рассогласования поступающего от СП ПУ. Представляет собой 2-х полупериодный фазочувствительный выпрямитель ФЧВ; - преобразователь П1 сигналов переменного тока, пропорциональных угловой скорости ω, поступающих от ДУСа. Представляет собой два однополупериодных ФЧВ; С выхода I выпрямителя сигнал угловой скорости поступает в усилитель. На вход второго выпрямителя поступает сигнал обратной связи, пропорциональный отклонению штока РА автопилота. -усилитель представляет собой усилитель постоянного тока. Состоит из магнитного усилителя МУ, предназначенного для суммирования и модулирования сигналов постоянного тока и лампового усилителя ЛУ, предназначенного для усиления и последующего выпрямления сигналов с магнитного усилителя. В усилителе сигнал угла суммируется с сигналом угловой скорости ω. - потенциометры центровки R43, R46, R49, R51. Служат для обнуления сигналов на выходе усилителя сервопривода; - контрольный разъем К – служит для подсоединения КПА при проверках АП
Рис.8 Принципиальная схема агрегата управления
Канал высоты несколько отличается от остальных каналов. Сигнал постоянного тока, пропорциональный барометрической высоте поступает с КВ-11 сразу на усилитель. Кассета канала высоты содержит блок питания, выпрямляющий переменный ток 36 в, 400 Гц в постоянный ток ±15в, необходимый для запитки потенциометра центровки и потенциометра КВ-11. Блок питания представляет собой 2-хфазный диодный выпрямитель. Принцип работы агрегата управления по каналам направления, крена и тангажа аналогичен, поэтому его работа рассмотрена на примере канала направления. Сигнал угла курса поступает в агрегат управления на первичную обмотку трансформатора ТрI, который служит для согласования выходного сопротивления сельсина-приемника с сопротивлением нагрузки. С выходной обмотки трансформатора сигнал поступает на преобразователь П2, который предназначен для выпрямления сигналов переменного тока, и представляет собой двухполупериодный фазочувствительный выпрямитель (см. электрическую схему). С выхода преобразователя П2 сигнал угла курса через потенциометр регулировки передаточного числа «Угол» и сопротивление R5 поступает на вход усилителя сервопривода. Усилитель сервопривода каждого канала является усилителем постоянного тока УПТ и состоит из магнитного усилителя МУ, предназначенного для суммирования и модулирования сигналов постоянного тока, и лампового усилителя ЛУ, предназначенного для усиления и последующего выпрямления сигналов с магнитного усилителя. Сигнал переменного тока, пропорциональный угловой скорости полета ω, поступает на вход одного из двух однополупериодных фазочувствительных выпрямителей преобразователя ПI агрегата управления. С выхода фазо- чувствительного выпрямителя сигнал угловой скорости через потенциометр регулировки передаточного числа «Скор» и резистор R3 поступает на вход усилителя сервопривода, где суммируется с сигналом угла курса. Сигнал обратной связи, пропорциональный отклонению штока рулевого агрегата автопилота, поступает на второй однополупериодный фазочувствительный преобразователь ПI. Выпрямленный сигнал обратной связи через резистор RI поступает на вход усилителя сервопривода и компенсирует сигналы угла курса и угловой скорости. Одновременно этот сигнал поступает на индикатор нулевой ИН-4 через резистор R2, который служит для ограничения тока рамки индикатора нулевого. В канале высоты на вход агрегата управления поступает сигнал постоянного тока, пропорциональный изменению барометрической высоты полетов. Этот сигнал через потенциометр передаточного числа R4 и постоянное сопротивление резистора R5 поступает на вход усилителя сервопривода канала высоты. В агрегате управления имеется блок питания БПI, выпрямляющий переменное напряжение 36В 400 Гц в постоянное ±15 В, которое необходимо для запитки потенциометров центровки и потенциометра корректора высоты КВ-11. Блок питания представляет собой двухфазный выпрямитель, собранный по мостовой схеме на диодах Д226А. Потенциометр центровки R9 служит для обнуления сигналов на выходе усилителя сервопривода агрегата управления. Для подсоединения контрольно-поверочной аппаратуры при проверке автопилота служит специальный контрольный разъем «К». В агрегате управления предусмотрен фильтр для преобразования сигнала КДК, который необходим для подавления высокочастотных управляющих воздействий пилота. При вмешательстве пилота в управление в агрегат управления поступает сигнал переменного тока, пропорциональный углу отклонения рукоятки пилота. Далее этот сигнал поступает на вход преобразователя П7, на входе которого стоят четыре диода ДI – Д4, ограничивающие величину входного напряжения до Uвх≤25 В с целью обеспечения необходимых условий работы преобразователя. На выходе преобразователя стоит конденсатор СI для фильтрации выпрямленного сигнала. Выпрямленный сигнал поступает через С2, С3 и R19 на вход усилителя сервопривода УС-2 канала крана. Датчик угловой скорости Датчики угловых скоростей ДУСы предназначены для выдачи сигналов, пропорциональных угловой скорости разворота ω относительно 3-х главных осей. Технические данные: Питание – 36 в 400Гц Чувствительность – 0,1º/с Датчики угловой скорости различаются только расположением оси гироузла в кожухе прибора: 1209 Г – датчик угловой скорости крена; ось гироузла расположена вертикально по 1209 Е – датчик угловой скорости тангажа отношению к основанию прибора 1209 К - датчик угловой скорости направления – ось расположена горизонтально
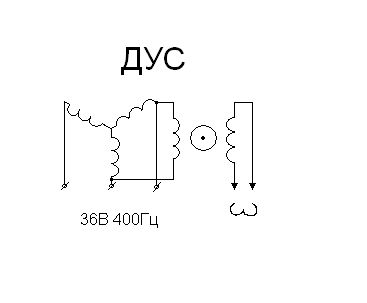
Рис.9 Внешний вид ДУС Основные элементы ДУСа: - гироузел; - индукционный потенциометр, ротор которого закреплен на оси прецессии и предназначен для выдачи сигнала пропорционального ω; - пневматический демпфер; - противодействующая пружина. Принцип действия Датчик угловой скорости представляет собой гироскоп с двумя степенями свободы. Если такой гироскоп поворачивать относительно его измерительной оси, то по закону прецессии ротор гироскопа будет поворачиваться вокруг оси, перпендикулярной измерительной до тех пор, пока возникший гироскопический момент не уравновесится моментом, создаваемым противодействующими пружинами. Так как пружины имеют линейную характеристику, то угол поворота ротора гироскопа вокруг оси прецессии будет пропорционален угловой скорости поворота гироскопа вокруг своей оси. Съем сигналов, пропорциональных угловой скорости, осуществляется потенциометром, ротор которого закреплен на оси прецессии гироскопа.
Рис.10 Принципиальная схема ДУСа
|
||||
|
|
Последнее изменение этой страницы: 2016-12-27; просмотров: 1373; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.3 (0.011 с.) |