
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Навигационный индикатор НИ-50БМК.Содержание книги
Поиск на нашем сайте
- для непрерывного указания места самолета в прямоугольной системе координат. Комплект, размещение - датчик воздушной скорости ДВС – под столиком штурмана; - распределительная коробка РК-2 – за креслом штурмана; - автомат курса АК-1 - задатчик ветра ЗВ-1 на п/д штурмана - счетчик координат СЧ - термокорректор ТК – носовая часть физюляжа. Технические данные Питаниe 27В, 36В 400Гц 3Ф Диапазон измерения ИВС 200÷1100км/ч Диапазон датчика ветра 0÷200км/ч Инструментальные погрешности 5% от пройденного пути. Включение, защита: АЗС-2 НИ-50БМК → На верхнем щитке штурмана. Система получает курс от ГИК-1 (УШ-2) Рп и Рст от ПВД-7. На передней панели РК-2: предохранители по = I – 2А По ~ I – 2А, 2шт.
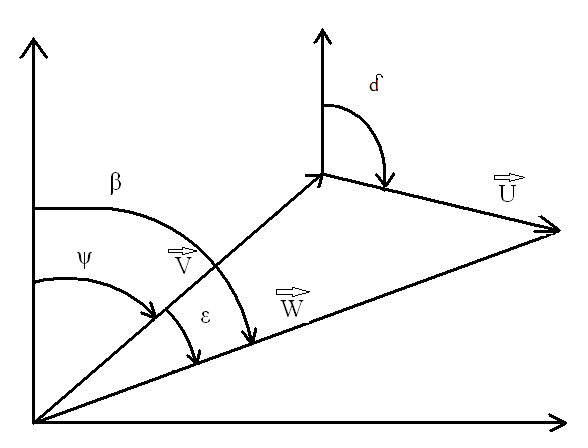
Навигационный треугольник скоростей. U-скорость V-воздушная скорость W-путевая скорость β-путевой угол ε-угол сноса δ-направление ветра
Для определения места самолета используются прямоугольные координаты. Если одну ось таких координат совместить с северным направлением меридиана, а другую с направлением на восток, то задача сводится к непрерывному автоматическому определению составляющих пути пройденных вдоль выбранных осей координат. Для решения этой задачи необходимо воспользоваться навигационным треугольником скоростей. Составляющие пути самолета определяются уравнениями: Ś=w cos β t = (V cos ψ + U cos δ) t Ś=w sin β t = (V sin ψ + U sin δ) t Следовательно, для определения МС необходимо осуществлять непрерывное интегрированные составляющие ИВС и скорости ветра.
В этом случае координаты самолета определяются уравнениями: Sc = SB = В ряде случаев удобно пользоваться координатами, повернутыми относительно географических на некоторый угол Ψк. Этот угол – угол между северным направлением меридиана и «сев» направлением выбранных координат – угол карты.
После преобразования уравнения получают вид: C = B = Автоматические устройства, которые определяют место самолета по приведенным уравнениям в произвольно ориентированной системе координат называются навигационными индикаторами. Функциональная схема НИ-50
Эта функциональная схема построена на основе уравнений. ДВС выдает U = Vивс, величина которой определяется мембранным механизмом. Для уменьшения методической погрешности в ДВС вводится t заторможенного потока воздуха. В АК происходит разложение вектора V на составляющие. Для этого в АК вводится сигнал курса от ГИК-1 и вручную угол карты ψк. ЗВ выдает напряжение = составляющим скорости ветра, параметры ветра U, δ и ψк в ЗВ вводятся вручную. СЧ выдает текущие координаты самолета в км в выбранной системе прямоугольных координат. Для этого в счетчике имеются 2 интегрирующих устройства, которые интегрирует сигналы от ЗВ и АК. Одно устройство интегрирует составляющие скорости самолета и скорости ветра вдоль оси С, другое – вдоль оси В. Назначение агрегатов НИ-50 ДВС – датчик воздушной скорости. Электромеханический решающий блок, в котором осуществляется решение уравнения ИВС, измерение ИВС полета и выдачи электрического сигнала = Vивс. Основные элементы ДВС. Функциональные потенциометры: -П1 перемещение щетки = Рст - -П3 управляется двигателем М1, который получает от усилителя сигнал, сформированный на П1, П2,П3. В суммарном сигнале, сформированном на П1,П2,П3 учитывается температура воздуха. П4, П5 - их щетки перемещает двигатель М1 С них снимается сигнал, пропорциональный ИВС. Двигатель М1 связан со щетками потенциометров через лекальный механизм, который служит для компенсации инструментальных ошибок электромеханической счетно – решающей схемы ДВС. Одновременно со щетками потенциометров П4, П5 М1 поворачивает стрелку Vивс по шкале ДВС. 300÷1200 км/ч Цена деления 10 км/ч
С- постоянный коэффициент Тт – t заторможенного потока α - коэффициент ~0.5 Рд, Рст – динамическое и статическое давление.
Для решения этого уравнения используется потенциометрическая схема умножения: Движок П1 перемещается от изменения Рст, а движок П2 от Рдин на выходе П2 получаем u = с Для введения поправки на t и для получения линейной зависимости выдачи u по скорости в схему вводится потенциометр отработки П3 с последовательно включенным приемником температуры П-1. 2 датчика температурыt П-1(термокорректор) служат для измерения температуры заторможенного воздушного потока.
П2 подключен последовательно с движком П1.На выходе П-2- u = Для учета tн в включено сопротивление Rt. Rt включено последовательно с движком потенциометра П3. П3 Служит для отработки напряжения, снимаемого с П2 и для получения линейной зависимости между ИВС и напряжениями, снимаемыми с П4, П5. П1,П2,П3 и Rt включены по схеме равноплечного электрического моста, в диагональ которого включена управляющая обмотка магнитного усилителя МУ. МУ управляет индукционным двигателем М1, ось которого через редуктор связанна с движками потенциометров П3,П4,П5 Автомат курса АК-1 Служит для автоматического преобразования напряжений, поступающих с ДВС и УШ-2 в напряжения В АК-1 поступает сигнал Vист, ψк – угол карты, γи – курс самолета, При необходимости можно ввести ∆М.
|
||||||
|
|
Последнее изменение этой страницы: 2016-12-27; просмотров: 1303; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.4.64 (0.007 с.) |


 w cos β dt =
w cos β dt =  (V cos ψ + U cos δ) dy
(V cos ψ + U cos δ) dy w sin β dt =
w sin β dt = 






 ИВС по осям прямоугольной системы координат.
ИВС по осям прямоугольной системы координат.


