Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Коррекционный механизм КМ – 8Содержание книги
Поиск на нашем сайте
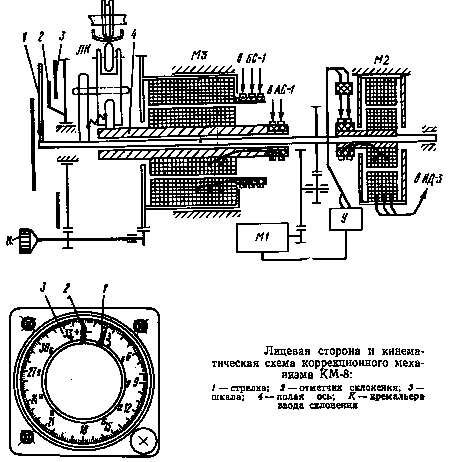
Предназначен для: связи ИД – 3 с ГА – 6; устранения четвертной девиации ∆Кчетв и инструментальных погрешностей с помощью лекального устройства (корректора); ввода магнитного склонения ± 180°; осуществления контроля работоспособности курсовой системы путем отработки двух фиктивных курсов 0° и 300°; указания компасного курса КК. Технические данные: напряжение питания: -I………………………………………………………….U=27B; ~I………………………………………………….U=36B 400Гц; напряжение выдаваемое КМ для питания ИД – 3…..1,5±0,1В 400Гц; погрешность КМ – 8……………………………………..не более ±1°; скорость согласования……………………………….не менее 4°/сек; устранения ∆Кчетв и инструментальных погрешностей с помощью лекального корректора (ЛК)………………………………………±5°. Основные узлы КМ-8: сельсины-приемники (СП) М2, М3; М1 (ДИД – 0,5ТА) с редуктором Р; полупроводниковый усилитель >; лекальный корректор (ЛК); трансформатор для питания обмоток подмагничивания ИД-3; узел контроля: 4 реле, подающие постоянный ток в фазные обмотки ИД-3 в режиме контроля Р1, Р4 → “0” P2, P3 → “300” Сельсин М2, двигатель М1 и усилитель вместе с индукционным датчиком ИД – 3 образуют первую следящую систему. На оси ротора сельсина М2 посажена стрелка для индикации по шкале компасного курса. Двигатель М1, согласовывая первую следящую систему, одновременно разворачивает через лекальный корректор полую ось, на которую посажен ротор сельсина М3 и, таким образом, вводит во вторую следящую систему магнитный курс. Сельсин М3 вместе с сельсином М7, двигателем М6 гироагрегата и усилителем АС-1 образует вторую следящую систему коррекционный механизм – гироагрегат (КМ – ГА). Для ввода ΔМ используется кремальера, которая через шестерни разворачивает статор сельсина М3 вместе с отметчиком ΔМ на требуемый угол. ΔМ отсчитывается по внутренней оцифровке шкалы.
Гироагрегат ГА - 6
Назначение: для работы в качестве гирополукомпаса (в режиме ГПК); для осреднения курса самолета определенного индукционным датчиком (в режиме МК); для дистанционной выдачи ортодромического курса и гиромагнитного курса на указатели. Технические данные: уход гироскопа в азимуте…………………………..не более 2°/час; послевиражная погрешность за 15 мин разворота с креном 15°……………………………………………………........не более 3°; время выхода из завала……………………………не более 20 мин; готовность к работе………………………………….не более 3 мин; питание: постоянный ток……………………………………...U=27B; переменный 3х фазный ток……………..U=36B, f=400Гц; данные гиромотора ГМВ – 524 время разгона…………………………………………………….2мин; время выбега………………………………………………..8÷16 мин.
Принцип действия: ЧЭ – курсовой гироскоп, с горизонтальным и свободным в азимуте расположением оси собственного вращения. В основу принципа работы ГА-6 положено свойство гироскопа сохранять неизменным в пространстве положение главной оси.
Основные узлы гироагрегата.
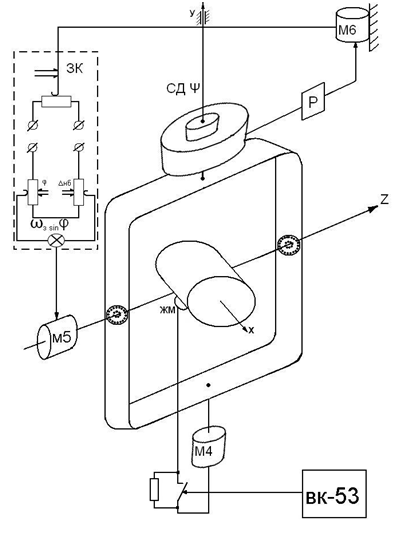
· Гироскопический узел; · Система горизонтальной коррекции (двигатель М4); · Коррекционный двигатель азимутальной коррекции (двигатель М5); · Сельсин датчик курса (М7); · Узел согласования большой скорости (М6); · Система вращающихся подшипников; · Корпус прибора.
ГА-6 в режиме ГПК Гироскопический узел. Гиромотор ГМВ-524 сдвоенный 3х фазный асинхронный двигатель с короткозамкнутой роторной обмоткой, помещен в герметичный корпус, заполненный водородом. На корпусе закреплены балансировочные элементы и ЖМП. Корпус гиромотора выполняет функции внутренней рамы карданного подвеса, а полуоси прикрепленные к корпусу образуют ось внутренней рамы. Гироузел поворачивается на оси в секторе ±80° на вращающихся подшипниках, установленных на наружной раме карданного подвеса. Два тормоза расположенные на карданной раме ограничивают скорость вращения гироузла при завалах. Тормозы одновременно являются контактными устройствами, которые при завале гироузла замыкают минусовую цепь лампы системы сигнализации на корпус, при этом на пульте управления загорается лампа “Завал ГА”.
|
||||
|
|
Последнее изменение этой страницы: 2016-12-27; просмотров: 759; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.17.78.184 (0.01 с.) |