
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Электрический указатель поворота ЭУП-53Содержание книги
Поиск на нашем сайте
Гироскоп и его свойства. Гироскопом в технике называют симметричное тело, быстро вращающееся вокруг своей оси симметрии. Гироскопом является наша Земля, быстро вращаюшийся маховик, детский волчок, артиллерийский снаряд, ротор электродвигателя и т.п. Быстро вращающаяся часть гироскопа называется ротором. Ось вращения ротора— главная ось гироскопа. Число степеней свободы зависит от типа подвеса, в который помещен ротор. Ротор гироскопа с тремя степенями свободы может вращаться вокруг 3 взаимно-перпендикулярных осей: вокруг оси X-X в подшипниках внутренней рамы / первая степень свободы, вместе с внутренней рамой оси Y-Y в подшипниках наружной рамы / вторая степень свободы и, наконец, вместе с внутренней и наружной рамами — вокруг оси Z-Z / треть степень свободы. Такой подвес, в котором ротор имеет возможность вращаться вокруг трех взаимно-перпендикулярных осей, называется КАРДАНОВЫМ ПОДВЕСОМ. Гироскоп обладает замечательным свойствами. ПЕРВОЕ СВОЙСТВО гироскопа с 3 степенями свободы состоит в том, что его ось стремится устойчиво сохранять в мировом пространстве приданное ей первоначальное положение. Если эта ось направлена на какую-либо звезду, то при любых перемещениях основания прибора она будет продолжать указывать на эту звезду, меняя свою ориентацию относительно земных осей. Впервые это свойство гироскопа использовал французский ученый Л. Фуко для экспериментального доказательства вращения Земли вокруг своей оси (1852г.). Отсюда и само название ГИРОСКОП, что в переводе с греческого («гирос» и «скопео») означает «наблюдать вращение». ВТОРОЕ СВОЙСТВО гироскопа состоит в том, что под действием случайных толчков, ударов, т.е. импульсов сил, главная ось не изменяет своего положения в пространстве, т.е. главная ось устойчива к кратковременным возмущениям. ТРЕТЬЕ СВОЙСТВО гироскопа обнаруживается, когда на его ось (или рамку) начинает действовать сила, стремящаяся привести ось в движение. Под действием этой силы ось гироскопа будет отклонятся не в сторону действия силы, а в направлении перпендикулярном к этой силе. Это движение назыается ПРЕЦЕССИЕЙ. Направление прецессии таково, что ось собственного вращения ротора стремится кратчайшим путем совместиться с осью вынужденного вращения. Свойства трёхстепенного гироскопа используются для измерения углов крена, тангажа и курса: АГБ-3К, АГД-1С, ГПК-52. Гироскоп с двумя степенями свободы представляет собой ротор, имеющий возможность поворачиваться вокруг двух взаимно-перпендикулярных осей: вокруг оси Z-Z в подшипниках ротора одна степень свободы (и вместе с рамкой вокруг оси X-X) вторая степень свободы. Такой гироскоп не обладает ни одним из свойств гироскопа с тремя степенями свободы, однако, у него есть другое, очень интересное свойство. Если основанию гироскопа сообщить вынужденное вращение с угловой скоростью ωвокруг вертикальной оси Y, то гироскоп тот час же повернётся, чтобы совместить ось собственного вращения с осью вынужденного вращения Y- Y. Таким образом, гироскоп с двумя степенями свободы может служиь индикатором, реагирующим на угловую скорость. Свойство гироскопа с двумя степенями свободы положен в основу работы указателя поворота ЭУП-53, выключателя коррекции ВК-53, датчиков угловых скоростей крена, тангажа, направления /ДУСов/ из комплекта автопилотов АП-34Б и АП-28Л1.
Выключатель коррекции ВК-53
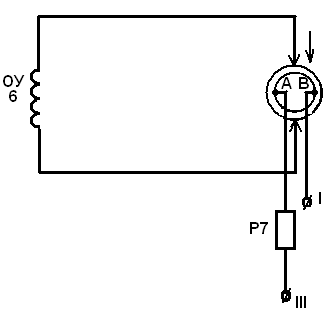
Выключатель коррекции измеряет угловую скорость разворота самолета и при достижении самолетом скорости разворота 0,1÷0,3 0/с с задержкой по времени 5÷15 с отключает системы коррекции гироскопических приборов (авиагоризонтов, гирополукомпасов, курсовых систем). Основным элементом ВК является гироскоп с 2 степенями свободы, осью измерения которого является ось Y. При развороте самолёта вокруг оси Y гироскоп прецессирует и щетка ламельного устройства подает напряжение на ОУ4 ДиД-0.5, который поворачивает щетки потенциометра 7. Напряжение, снимаемое с потенциометра, поступает на вторую управляющую обмотку ОУ6. ОУ4 намотана встречно к ОУ6, поэтому магнитный поток, создаваемый ОУ6 противодействует магнитному потоку ОУ4. При Если действие угловой скорости кратковременно (t<5÷15 с), двигатель не успеет повернуть контактный диск на угол переключения. По окончании разворота гироскоп под действием пружин возвращается в исходное положение и обесточивает реле. Схема выключателя коррекции готова к работе. Гироскопический узел Основной элемент – гиромотор – ГМА-4П. 3-х фазный асинхронный двигатель. Статор находится внутри ротора. Рамкой гироскопа служит корпус гиромотора. Система задержки времени Электродвигатель ДиД-0,5 с редуктором Потенциометр Выключатель со щетками (контактный диск) Коллектор со щетками.
ДиД-0,5 (5) – двухфазный асинхронный индукционный двигатель. Принцип действия основан на взаимодействии вращающегося магнитного поля, создаваемого статором с вихревыми токами, наведенными этим полем в роторе. ОW постоянно включена между фазами II и III, ОУ4 между фазами I-III, а ОУ6 между фазами III-I, или наоборот, в зависимости от направления разворота. ОУ4 через R одним концом подключена к средней точке делителя U (из 2-х сопротивлений) и подключена фазам I и III. Вторым концом подключена через щетку, скользящую по контактам панели, к фазам I и III. ОУ6 соединена со щетками потенциометра 7.
Потенциометр (7) Питание на потенциометр от фаз I и III через балластное сопротивление, для ограничения U подаваемого на потенциометр. Щетки расположены относительно отводов под углом
При появлении ДиД-0,5 через редуктор вращает вал, на котором закреплены: 1. узел щеток потенциометра 7; 2. контактный диск (выключатель)8; 3. коллектор, который соединяет ОУ6 со щетками потенциометра 7, (нет на схеме). Связаны с корпусом (неподвижны) - потенциометр 7 - узел щеток коллектора (нет на схеме) - узел щеток контактного диска (выключателя). Коллектор со щетками Соединяет ОУ6 со щетками потенциометра 7 Горизонтальный полет При отсутствии
Разворот Гироузел поворачивается. Щетка 1 сходит с обесточенной средней части контактной ламели. ОУ4 подключается к фазе I или III. Клемма 6 находится под средним потенциалом фаз III и I, так как соединена с делителем U этих фаз. Благодаря делителю напряжения обмотка управленияОУ4 при подключении клеммы 2 к фазе I будет присоединена последовательно с сопротивлением делителя к фазам I-III и получит напряжение При подключении клеммы 2 к фазе III будет присоединена к фазам III-I и получит Фазы
При подаче U на ОУ4 возникает вращающий момент на валу ротора, который начинает поворачивать вал и связанный с ним контактный диск 8 относительно щеток и узел щеток относительно потенциометра 7. По мере смещения щеток от среднего положения возникает и будет увеличиваться разность потенциалов т.А и т.В ОУ4 и ОУ6 находятся в противофазе, т.е. ампервитки ОУ4 находятся в противофазе к ампервиткам ОУ6. Когда U на ОУ4 станет равным U ОУ6, двигатель ДиД-0,5 остановится. Щетки контактного диска будут находиться на токоподводящей поверхности диска. Срабатывает реле, контакты которого размыкают цепи систем коррекции. Прекращение разворота При прекращении ОУ6 получает питание от щеток потенциометра 7. U ОУ6 противоположно по фазе U ОУ4. Поэтому при прекращении разворота и обесточивании ОУ4 двигатель будет вращаться в обратную сторону под действием U ОУ6, направляя щетки потенциометра 7 к нулевому положению и контактный диск относительно его щеток. Когда щетки перейдут на секторы, которые не закорочены между собой, поступит команда на включение коррекции (контакты реле замкнутся, реле обесточивается). Использование 3-х степенного гироскопа в качестве авиагоризонта. ++
Рассмотрим возможность применения 3-х степенного гироскопа для определения пространственного положения воздушного судна. Положение ВС относительно плоскости горизонта определяется двумя углами: углом тангажа Угол тангажа – угол между продольной осью ВС и плоскостью горизонта, отсчитываемый в вертикальной плоскости. Угол крена – угол поворота ВС вокруг его продольной оси, отсчитываемый от вертикальной плоскости, проходящей через продольную ось вертолета. Положение ВС относительно плоскости горизонта можно определить, если на ВС знать направление ИСТИННОЙ ВЕРТИКАЛИ, т.е. линии, проходящей через центр Земли и ВС, и измерить отклонение ВС от этого направления. Установим 3-х степенной гироскоп на летательный аппарат. Ось собственного вращения Y-Y расположена вертикально. Внешняя ось кардановa подвеса параллельна продольной оси ВС X-X, а внутренняя – направлена параллельно поперечной оси ВС Z-Z.
Поскольку свободный гироскоп стремится сохранить положение своей главной оси в пространстве неизменным, т.е. вертикально, то отклонение продольной и поперечной осей ВС от вертикально расположенной оси гироскопа позволит определить углы крена и тангажа. Авиагоризонт будет правильно показывать углы крена и тангажа только в том случае, если ось ротора будет занимать строго вертикальное положение. Однако вследствие ряда причин ось ротора гироскопа отклоняется от вертикали. Основные из них следующие: моменты трения в осях карданова подвеса, вращения Земли и перемещение ВС относительно Земли. Для определения характера влияния вращения Земли на показания авиагоризонта представим авиагоризонт, расположенный на экваторе. В начальный момент времени главная ось гироскопа направлена по вертикали и перпендикулярна плоскости истинного горизонта, проходящего через т. А. Авиагоризонт покажет угол крена = 0, угол тангажа = 0. В результате вращения Земли т. А вместе с Землей, например за 6 часов, повернется на 90°; вместе с т. А повернется и самолет, который стоит на Земле неподвижно. При этом главная ось гироскопа, которая сохраняет свое положение в мировом пространстве неизменным, окажется по отношению к т. А развернутый на 90° и станет параллельна плоскости истинного горизонта. Авиагоризонт покажет угол крена =90°. Аналогично на работе авиагоризонта сказывается и перемещение ВС относительно Земли. Установим гироскоп так, чтобы его ось в начале полета была вертикальна и будем выполнять прямолинейный полет.
Однако в обычном, “Земном” смысле, это не будет прямолинейный полет. Под прямолинейном полетом в земных условиях понимают полет по дуге постоянного радиуса вокруг центра Земли, т.е. перемещения ВС относительно Земли также вызывает поворот вертикали места, над которым пролетает самолет, в то время как главная ось сохраняет свое положение вертикали относительно мирового пространства. Как видно из рисунка в начальный момент времени главная ось гироскопа, установленного на ВС, расположена вертикально, и авиагоризонт покажет угол крена=0, угол тангажа =0. Предположим, в результате прямолинейного полета за какое-то время ВС переместился вт. В. Поскольку главная ось гироскопа стремится сохранить положение в пространстве неизменным, то она оказалась развернутой на 90° по отношению к плоскости истинного горизонта, проходящего через т. В и заняла положение не вертикальное, а горизонтальное, авиагоризонт покажет угол тангажа=90° Таким образом, по отношению к Земле 3-х степенной гироскоп с вертикально расположенной осью будет менять свое положение, совершая так называемое КАЖУЩЕЕСЯ движение. Движение называют кажущимся потому, что в действительности не гироскоп меняет свое положение относительно Земли, а Земля перемещается относительно гироскопа, сохраняющего положение своей оси в мировом пространстве неизменным. Скорость этого кажущегося движения зависит от географической широты места, курса ВС, скорости полета и скорости вращения Земли. Если, например, ВС летит горизонтально со скоростью V=200 км/ч, с истинным курсом=30° на широте =60°, то главная ось гироскопа будет “уходить” по тангажу со скоростью ωz=6.45°/час, а по крену со скоростью ωx =5.5°/час. Очевидно, что использование одного лишь гироскопа в карданном подвесе недостаточно для правильного измерения углов крена и тангажа. Необходимо такое устройство, которое бы заставило главную ось гироскопа всегда быть перпендикулярной плоскости истинного горизонта, т.е. располагаться по вертикали места.
В качестве такого устройства в авиагоризонтах используется система маятниковой коррекции, принцип работы которой описан в разделе “Авиагоризонт АГБ-3К”.
Авиагоризонт АГБ-3К Авиагоризонт АГБ-3К предназначен для: определения и индикации пространственного положения вертолета относительно истинного горизонта; выдачи электрических сигналов, пропорциональных углам крена и тангажа в каналы крена и тангажа автопилота АП-34Б и в систему САРПП-12Д 1М); указания наличия и направления скольжения. Авиагоризонты АГБ-3К установлены на левой и правой приборных досках (вертолет Ми-8Т, вертолет МИ-8МТВ), средней приборной доске с-та АН-24/26.
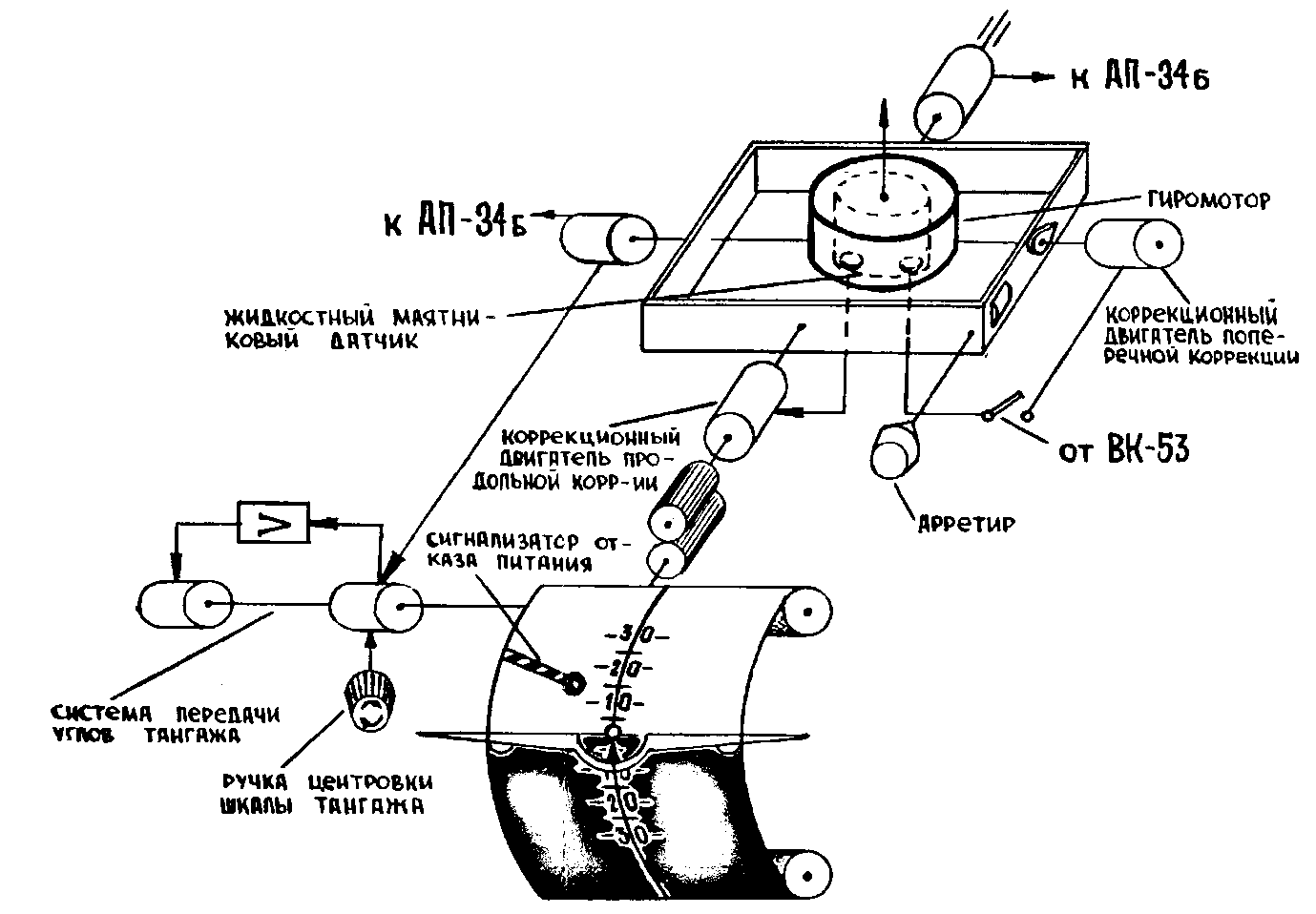
Технические данные. Диапазон измерения углов тангажа ±80º Диапазон измерения углов крена ± 360º Время готовности не более 1.5мин. Скорость прецессии гироскопа по осям крена и тангажа под действием коррекции от 1.8 до 6º/мин Уход гироскопа на качающемся основании за 5 мин при выключенной коррекции не превышает по крену и тангажу ± 2.5º Погрешность измерения углов крена и тангажа: в диапазоне от 0 до 30º ±1º на углах свыше 30º ±2º Напряжение питания: - постоянный ток 27 в - переменный ток, трехфазный 36в 400 Гц 3-хфазное Принцип действия АГБ-3К. Основан на свойстве гироскопа с 3 степенями свободы сохранять неизменным относительно мирового пространства положение его главной оси и возможности совмещения ее с вертикалью места с помощью корректирующего устройства. Для определения пространственного положения самолета относительно плоскости истинного горизонта используется 3-х степенной гироскоп с вертикально расположенной осью. Основные узлы АГБ-3К: - гироузел; - система маятниковой коррекции; - указатель углов крена и тангажа; - система передачи углов тангажа; - сигнализатор отказа питания; - система выдачи сигналов крена и тангажа в АП-34Б и САРПП-12Д1М; - арретир; - указатель скольжения.
Рис. Внешний вид авиагоризонта АГБ-3К
Гиромотор типа ГМА-4П – 3-х фазный асинхронный двигатель с одной парой полюсов статора и К3 ротором. Гиромотор закреплен в корпусе (внутренняя рама) с помощью резьбовых втулок. Кожух крепится в карданной раме с помощью радиальных подшипников. В нижней части кожуха (внутренней рамы) закреплены 2 жидкостных маятника. На внешней раме находятся моментный двигатель поперечной коррекции и сельсин-датчик тангажа. Внешняя рама на радиальных подшипниках подвешена в корпусе прибора. На ее оси находится ротор сельсин-датчика крена, ротор моментного двигателя продольной коррекции. Их статоры закреплены в корпусе АГ. Маятниковая коррекция. Как известно, главная ось некорректируемого трехстепенного гироскопа вследствие суточного вращения Земли и перемещения самолета в полете относительно Земли, а также под влиянием трения в опорах карданова подвеса и остаточной несбалансированности гироскопа будет отклоняться от вертикального положения. Система маятниковой коррекции предназначена для удержания главной оси гироскопа в вертикальном положении. Чувствительным элементом системы коррекции являются два однокоординатных жидкостных маятника типа ДЖМ-9Б. Жидкостные маятники располагаются таким образом, что ось датчика 1 параллельна поперечной оси гироузла (оси измерения тангажа), а ось датчика 2 параллельна продольной оси (оси измерения крена). Исполнительными элементами системы маятниковой коррекции являются два коррекционных двигателя – продольной и поперечной коррекции.
При отклонении главной оси гироскопа от вертикального положения относительно оси крена или тангажа управляющий сигнал с жидкостного маятника поступает на соответствующий коррекционный двигатель. Вращающий момент двигателя воздействует на внешнюю или внутреннюю раму гироскопа, вызывая прецессионное движение гироскопа к вертикальному положению. Выключение поперечной коррекции при разворотах производится выключателем коррекции ВК-53РШ. Индикация крена и тангажа. Для индикации углов крена и тангажа предназначены следующие элементы и узлы авиагоризонта: - силуэт самолетика; - шкала крена; - шкала тангажа; - механизм центровки шкалы крена; - следящая система передачи угла тангажа;
Силуэт самолетика связан с осью внешней рамы через две трибки – ведущую и ведомую. Ведущая – на оси карданной рамы. Ведомая – жестко связана с силуэтом самолетика. Шкала крена закреплена на корпусе прибора. Шкала тангажа представляет собой ленту, намотанную на два барабана – верхний и нижний. Механизм центровки предназначен для совмещения линии искусственного горизонта и центра силуэта самолетика при наличии угла атаки в горизонтальном полете. Следящая система – сельсин-датчик угла крена укреплен на внутренней оси карданного подвеса. Индикация крена. При крене самолета корпус АГ, жестко связанный с корпусом ВС, поворачивается относительно внешней рамы на угол крена. Крен ВС имитируется поворотом силуэта-самолетика на лицевой части прибора, относительно шкалы крена. Силуэт связан с внешней рамой через пару трибок с передаточным отношением 1:1. Ведущая связана с осью внешней рамы, ведомая – с силуэтом-самолетиком. Силуэт при крене в результате жесткого зацепления с трибкой, повернется на двойной угол крена и его положение будет соответствовать по величине и направлению углу крена ВС.
Индикация тангажа. Представляет собой следящую систему на сельсинах, работающих в трансформаторном режиме. При изменении тангажа корпус прибора вместе с внешней рамой будет поворачиваться относительно внутренней рамы, которая неподвижна. Это вызовет рассогласование между сельсин-датчиком и сельсин-приемником. Сигнал рассогласования с ротором обмотки сельсин-приемника направится на вход усилителя, далее на управляющую обмотку ДГ-0,5ТА. Двигатель-генератор будет вращаться переводя через редуктор ротор сельсин-приемника в согласованное положение с сельсин-датчиком. Одновременно ДГ вращает барабан с намотанной на него ленточной шкалой, по ней отсчитываеться угол тангажа. Для демпфирования колебаний следящей системы применяется скоростная обратная связь, напряжение снимается с сигнальной обмотки ДГ-0,5. Сигнализация отказа питания Информирует об отказе питания АГ по постоянному и переменному току. При исправных цепях постоянного и переменного тока по обмоткам двигателя ДиД-0,5протекают рабочие токи гиромотора и СД крена и тангажа. В результате этого на валу двигателя возникает вращающий момент, под действием которого флажок, укрепленный на валу двигателя убирается из видимой зоны лицевой части шкалы. При отсутствии питания по переменному току момент ДиД-0,5 уменьшается и под воздействием пружины флажок соединенный с ней, выбрасывается в видимую зону. При отсутствии питания по постоянному току два реле РЭС-10 включенные в цепь постоянного тока параллельно усилителю отключаются и своими замкнутыми контактами шунтируют обмотки ДиД-0,5. Вращательный момент двигателя уменьшается, пружина выбрасывает бленкер в видимую зону.
Арретирование. При нажатии кнопки «арретир» усилие от кнопки через ось передается водилу и возвратный пружине. Водило, через пружину передает усилие штоку, на конце которого шарикоподшипник. Шток доходит до соприкосновения с кулачком внешней рамы и он, поворачиваясь, устанавливает внешнюю раму в рабочее положение. Когда она установится в рабочее положение, шток попадает в отверстие кулачка внешней рамы, и будет давить на толкатель. А толкатель соприкасается с кулачком внутренней рамы. И под его воздействием кулачек поворачивается и арретирует внутреннюю раму. Прибор арретирован. При отпускании кнопки все элементы арретирования возвращаются в исходное положение. При арретировании АГ с вращающимся гиромотором для удержания кнопки в нажатом положении до окончания процесса арретирования служит собачка. Виражная ошибка АГБ-3 Когда совершает разворот с угловой скоростью ω, то на жидкостный маятник, кроме силы тяжести mg, еще действует центробежная сила
Для того, чтобы исключить эту ошибку, которая называется виражной, при разворотах с угловой скоростью ω=0, Ι – 0,3º сек. выключатель коррекции ВК-53 отключает поперечную коррекцию АГБ. После окончания виража поперечная коррекция вновь включается.
АГД-1С.
Служит для индикации положения самолета относительно плоскости истинного горизонта и выдачи сигналов крена и тангажа потребителям. Установлен на Ан-24, Ан-26 (лев., прав, п/д) Комплект и размещение: - гиродатчик (изд. 458 МКС 2 серии) установлен под полом пассажирской кабины (шп № 18,19) - указатель 642.511.0002 (лев., прав, п/д) Питание, включение: -U = 27В
Левый АГД питается от ПТ-200Ц №1 Правый АГД питается от централизованной шины АЗСы «АГД лев.»,»АГД прав.» Выключатели «АГД лев.»,»АГД прав.» ТТД: - Диапазон измерения: по крену: 0-360° по тангажу: 0-360° (за исключением углов 85-^-95°пикирование, кабрирование). - Погрешность по крену после разворота на 360° ±3° - Погрешность по крену и тангажу после выполнения любых фигур высшего пилотажа ±5° - Послевзлетная ошибка не более 3° - Скорость коррекции гироскопа поперечной оси 2 - Погрешность передачи углов крена и тангажа на указатель на нуле ±1° до 30° ±1,5° свыше 30° ±2,5° Гиродатчик является датчиком сигналов крена и тангажа для указателей авиагоризонта и других потребителей, а так же обеспечивает выдачу электрических сигналов при достижении самолетом предельных кренов γпред= 15±1,5° (при взлете и заходе на посадку) γпред= 32±2° (для маршрутного полета) Каждый гиродатчик работает со своим выключателем коррекции. Основные элементы конструкции гиродатчика: Гироскопический узел; Система маятниковой коррекции; Следящая рама; Система арретирования; Система сигнализации наличия питания и арретирования; Сигнализатор предельных углов крена. Гироскопический узел. Гиромотор ГМА-4П, трехфазный асинхронизированный двигатель. Заключен в кожух (внутренняя рама) с помощью резьбовых втулок. В нижней части кожуха 2 переключателя ДЖМ-25, сверху – 2 жидкостных отключателя системы маятниковой коррекции. Кожух с помощью радиальных подшипников крепится в карданной раме (внешней). На оси кожуха гиромотора крепится ротор индукционного датчика, ротор моментного датчика продольной коррекции. Статоры их размещены на карданной раме. Карданная рама, в радиальных подшипниках крепится в следящей раме. На оси карданной рамы установлен ротор СД тангажа и ротор моментного двигателя поперечной коррекции. Их статоры расположены в следящей раме. Следящая рама с помощью радиальных подшипников крепится в корпусе гиродатчика. На ее оси расположен ротор СД крена, а его статор закреплен в корпусе гиродатчика. На оси ротора СД крена установлен диск-сигнализатор предельных углов крена. Следящая рама. Служит для обеспечения невыбиваемости гироскопа при выполнении фигур высшего пилотажа. Система следящей рамы состоит из индукционного датчика,, ротор которого закреплен на оси гирокамеры, а статор на карданной раме; усилителя, двигатель-генератора ДГ-1ТА, следящей рамы. Следящая рама с помощью отрабатывающей системы непрерывно устанавливает внешнюю ось карданной рамы (ось ее вращения) в положение, перпендикулярное главной оси гироскопа - оси ротора. Отработка следящей рамы осуществляется по сигналам индукционного датчика, якорь которого 5 закреплен на оси гироузла, а статор 3 на карданной раме. Суть работы индукционного датчика заключается в следующем. Индукционный датчик представляет собой бесконтактный линейный трансформатор. В АГД-1 трехстержневой индукционный датчик измеряет отклонение оси карданной рамы от положения, перпендикулярного главной оси гироскопа (оси ротора). Датчик состоит из двух частей, взаиморасположение которых изменяется поворотом подвижной части (ротора) относительно неподвижной части (статора). Действие индукционного датчика основано на принципе трансформатора. Магнитный поток, создаваемый средней катушкой при питании ее напряжением возбуждения 36 В 400 Гц, разветвляется на два потока, замыкающиеся через якорь и зазоры между якорем и стержнями статора. Эти потоки наводят ЭДС в каждой из боковых катушек. Обмотки боковых катушек соединены встречно. При симметричном расположении ротора ЭДС обеих катушек равны между собой Е1=Е2, а снимаемый сигнал равен нулю U0=0. В результате на выводных клеммах датчика возникает напряжение сигнала, равное геометрической сумме ЭДС крайних катушек:
Uсиг=Е1+Е2=с α
где с – коэффициент пропорциональности; α – угол поворота якоря. Линейность сигнала индукционного датчика сохраняется в пределах угла не менее ±7˚. При повороте ротора на углы более ±7˚ до углов ±35˚ напряжение на сигнальной обмотке практически не изменяется.
При отклонении внешней оси карданной рамы от положения, перпендикулярного главной оси гироскопа, индукционный датчик выдает сигнал переменного тока на вход усилителя 1, далее на двигатель-генератор 2 типа ДГ-1, который через редуктор отрабатывает следящую раму 7, а, следовательно, и внешнюю ось карданной рамы в положение, перпендикулярное главной оси гироскопа, со скоростью заведомо большей, чем возможная скорость изменения крена самолета. В результате при любых эволюциях самолета ось ротора гироскопа не совпадает с осью карданной рамы и гиродатчик приобретает свойство «невыбиваемости», т.е. способность выдавать правильные показания после выполнения фигур сложного пилотажа. Система арретирования. Состоит из следующих основных частей: Двигателя постоянного тока ПДЗ-1,7 с редуктором и фрикционной муфтой ограничивающей усилие передаваемое от двигателя к штоку арретира 21 - 4Х кулачков 27, 12, 13, 26 Рабочей пружины 16 и возвратной 17 Толкателя 9 и стержня 14 На внутренней оси карданного подвеса кулачок 28 закреплен на корпусе гиромотора. Профиль кулачка состоит симметричных ветвей выполненных по логарифмической спирали. Кулачок имеет вырез, в который входит стержень 14, фиксирующий гироузел в заарретированном положении. Такого же типа кулачок 12, но несколько большего размера расположен на внешней оси карданного подвеса. На следящей раме 15 имеется торцевой кулачок 2 6, профиль которого образуют 2 симметричные ветви винтовой линии. На корпусе прибора 7 установлен редуктор арретира 19. Шток 18 редуктора арретира может двигаться возвратно-поступательно без вращения в гнезде выходной шестерни редуктора. Выходная шестерня, вращающаяся в двух радиальных шарикоподшипниках снабжена пальцем, который выдвигает шток, перемещаясь по винтовой канавке на его поверхности. Полное арретирование прибора происходит за один оборот выходной шестерни. За это время ведущий палец перемещается на величину одного шага по винтовой канавке на штоке, после чего попадает в продольную канавку и откидывается назад под действием пружины 16, находящейся внутри штока возвратной пружины 17. Рассмотрим взаимодействие частей арретирующего устройства при арретировании гиродатчика с вращающимся ротором гиромотора (повторное арретирование). Предположим гироузел и карданная рама повернуты на произвольный угол, следящая рама также находится в произвольном положении. Для приведения прибора в исходное положение необходимо подать сигнал на двигатель арретирующего устройства. Тогда шток 18 начнет выдвигаться и при нажатии на кулачок 2 6, следящая рама 15 встанет в положение, при котором ее плоскость будет параллельна основанию прибора. При этом шток 18 соскользнет с кулачка 2 6, надавит на стержень арретира, передавая тем самым через рабочую пружину 16 усилие на кулачок 12, а вместе с ним и на карданную раму 14. Рама будет вращаться вокруг оси вращения в сторону уменьшения плеча, на которое приложена сила. Момент, приложенный к внешней оси карданного подвеса вызовет прецессию гироузла вокруг внутренней оси до упора, который ограничивает поворот гироузла. Во время прецессии гироузла фрикционная муфта редуктора арретира проскальзывает, передавая лишь тот момент, который необходим чтобы обеспечить прецессию гироузла за нужное время. После подхода гироузла к упору, рама будет свободно поворачиваться вокруг внешней оси карданного подвеса, до тех пор пока выступающий конец кулачка 13 не войдет в вырез кулачка 12. После фиксации карданной рамы относительно корпуса прибора нажимная плоскость кулачка 13 подойдет к стержню 14, вдвинет его внутрь рамы прикладывая момент к кулачку 28 и гироузлу 1. Вследствие этого гироузел обладающий только двумя степенями свободы (т.к. карданная рама заарретирована) придет в положение в котором стержень 14 находится в вырезе кулачка 28. Это соответствует положению гироузла при котором главная ось гироскопа перпендикулярна основанию прибора. Во время арретирования гироузла выступающий кулачок 13 продвигается в вырез кулачка 12 не меняя положения карданной рамы. Разарретирование прибора происходит практически мгновенно в тот момент когда ведущий палец выходной шестерни попадает в продольную канавку штока 18 и откидывается в исходное положение под действием возвратной пружины 17 и пружины в штоке арретира, которые в конце арретирования максимально сжаты, энергию удара штока воспринимает резиновый буфер 22. Арретирование прибора при запуске (гиромотор не вращается) отличается от описанного выше тем, что каждая из рам арретируется как твердое тело. Таким образом, при запуске арретир срабатывает автоматически, следящая рама устанавливается параллельно основанию прибора, а главная ось гироскопа перпендикулярно, затем происходит автоматическое разарретирование. Запуск гиродатчика. Если не включено питание -27В и ~36В 400Гц, а резервный источник питания -27В подключен, то +27 от резервного источника через штырьки 30, 31, НЗ контакт Рб-2, штырьки 15, 16 разъема гиродатчика поступает на лампочку сигнализации указателя горизонта, которая сигнализирует об отсутствии питания гиродатчика. При включении питания -27В и ~36В 400Гц через НЗ контакт Р8-1 и Р7-1 поступает на двигатель №1 арретира. Шток арретира начинает выдвигаться, арретируя раму прибора. В конце цикла арретирования срабатывает концевой выключатель Bl, HP контакты замыкают цепь питания реле Р5 и Рб, они срабатывают и HP контакт Р6-1 через НЗ контакт Р1-1 блокирует HP контакты концевого выключателя Bl. HP контакт Рб-2 подключает цепь питания сигнальной лампочки к якорю двигателя арретира, при обратном ходе штока арретира замыкаются НЗ контакты выключателя В1 и +27 поступает на Р7. Реле, срабатывая своими контактами Р7-1 снимает +27 с двигателя арретира, при этом якорь оказывается подключенным на резистор R1. Через НЗ контакт Р1-2 и HP контакт Р7-2, который замыкается при срабатывании реле Р7, питание переменным током поступает на Р8. Р8 срабатывает и своими контактами Р8-1 снимает +27 с лампочки сигнализации и НЗ контакта
|
||||
|
|
Последнее изменение этой страницы: 2016-12-27; просмотров: 1779; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.58.141 (0.017 с.) |





 ≥0,1÷0,3 0/с при установившемся развороте (t
≥0,1÷0,3 0/с при установившемся развороте (t  =5÷15 с) двигатель ДиД-0,5 повернет контактный диск на такой угол, что напряжение поступит на реле, которые своими контактами отключают коррекцию соответствующих приборов.
=5÷15 с) двигатель ДиД-0,5 повернет контактный диск на такой угол, что напряжение поступит на реле, которые своими контактами отключают коррекцию соответствующих приборов. . При отсутствии разворота
. При отсутствии разворота  . На ОУ6 подается
. На ОУ6 подается  .
.
 ДиД-0,5 разворачивает узел щёток относительно потенциометра 7.
ДиД-0,5 разворачивает узел щёток относительно потенциометра 7. ;
; ;
; и
и  сдвинуты на
сдвинуты на  . Таким образом ДиД-0,5 при левом развороте будет вращаться в одну сторону, при правом – в другую.
. Таким образом ДиД-0,5 при левом развороте будет вращаться в одну сторону, при правом – в другую. и углом крена
и углом крена  .
.





 , и маятник устанавливается не по истинной вертикали, а по равнодействующей этих сил (в случае координированного разворота направление равнодействующей совпадает с нормальной осью вертолета).
, и маятник устанавливается не по истинной вертикали, а по равнодействующей этих сил (в случае координированного разворота направление равнодействующей совпадает с нормальной осью вертолета).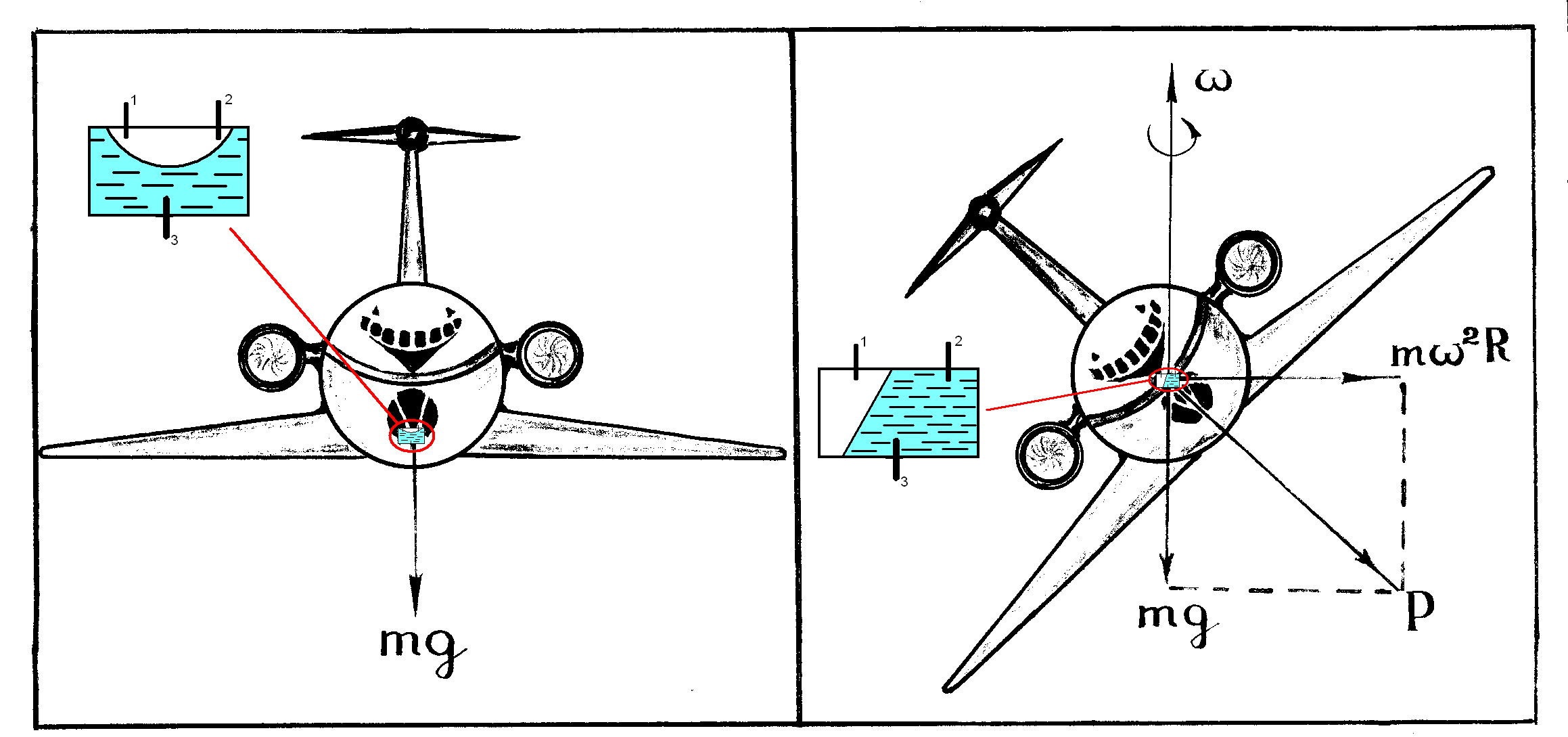 На коррекционный двигатель поперечной коррекции поступает сигнал, и главная ось гироскопа устанавливается в положение «кажущейся вертикали», что создает ошибку в АГБ по крену. Предположим, экипаж вертолета выполняет вираж с креном γ=25º. Под действием системы маятниковой коррекции главная ось гироскопа будет постепенно устанавливаться в положение «кажущейся вертикали», что приведет к постепенному уменьшению показаний авиагоризонта по крену. В конце виража авиагоризонт укажет крен γ=0º, а при последующем выравнивании – крен γ=25º.
На коррекционный двигатель поперечной коррекции поступает сигнал, и главная ось гироскопа устанавливается в положение «кажущейся вертикали», что создает ошибку в АГБ по крену. Предположим, экипаж вертолета выполняет вираж с креном γ=25º. Под действием системы маятниковой коррекции главная ось гироскопа будет постепенно устанавливаться в положение «кажущейся вертикали», что приведет к постепенному уменьшению показаний авиагоризонта по крену. В конце виража авиагоризонт укажет крен γ=0º, а при последующем выравнивании – крен γ=25º. U = ЗбВ, 400Гц 3ф
U = ЗбВ, 400Гц 3ф 8° /мин продольной оси 1÷З° /мин
8° /мин продольной оси 1÷З° /мин




