
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Опорно-рухова система людиниСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
У процесах життєдіяльності біологічних систем здійснюються різноманітні механічні явища. До них можна віднести рух газоподібних і рідких природних та біологічних середовищ, скорочення і розслаблення м'язів, функціонування опорно-рухового апарату, поширення хвиль пружної деформації, процеси деформації клітин, тканин та органів. Біомеханікою називається розділ біофізики, у якому розглядаються механічні властивості живих тканин і органів, а також механічні явища, які відбуваються як з цілим організмом, так і з його окремими органами. Опорно-рухова система людини, що складається із з'єднаних між собою кісток скелета і м'язів, з точки зору біомеханіки є сукупністю важелів, що підтримують людину у стані рівноваги. Важелем називається тверде тіло (як правило стержень), що має нерухому вісь обертання, до якої прикладені сили, які створюють моменти відносно цієї осі. Залежно від розміщення сил відносно осі обертання розрізняють важелі першого й другого роду. У важеля першого роду діючі на нього сили F1 і F2 прикладені по різні боки від точки опори (осі обертання) й мають однаковий напрям (рис. 1.4,б). У важеля другого роду діючі на нього сили прикладені по один бік від осі обертання й мають різний напрям (рис 1.5, б). Як видно з рис 1.4 б, момент сили Т обертає важіль за годинниковою стрілкою (його вважають додатним), а момент сили F1 обертає важіль проти годинникової стрілки (його вважають від'ємним). Важіль перебуває в стані рівноваги, якщо алгебрична сума моментів сил, що діють на нього, дорівнює нулю:
С
Рисунок 1.4 б Найкоротша відстань l від осі (центра) обертання до лінії дії сили називається плечем сили. Величина, що дорівнює добутку сили F на її плече І, називається моментом сили:
Рисунок 1.5 б З формули (1.2) видно, що в СІ одиницею моменту сили є 1 Нм –ньютон-метр. В опорно-руховій системі людини нараховують приблизно 200 різних важелів, їх приводять у рух сили, що виникають при скороченні (деформації) м'язів. Розглянемо деякі з них.
а б
Рисунок 1. 4 Рисунок 1.4.а Голова людини, як відомо з анатомії, опирається на перший хребець О (рис. 1.4 ). На неї діють дві сили: сила тяжіння Т і сила F, яку спричинюють потиличні м'язи. Сила тяжіння прикладена до точки С — центра сил тяжіння голови*. Її лінія дії проходить спереду першого хребця, який виконує роль точки опори О. Внаслідок цього голова має постійно нахилятися вперед і, щоб підтримувати її в положенні рівноваги, сила скорочення потиличних м'язів має діяти вертикально вниз. Голова перебуває в стані рівноваги, коли алгебрична сума моментів прикладених до неї сил дорівнює нулю: М1+М2 = 0. Позначимо плече сили потиличних м'язів буквою а, а плече сили тяжіння — буквою Ь (рис. 1.4, б). Тоді М1 == -Fa і М2 = ТЬ. Отже, - Fа + ТЬ = 0, звідки F= Оскільки Ь < а, то сила потиличних м'язів завжди менша від сили тяжіння голови. Важіль першого роду дає виграш у силі, тому його ще називають важелем сили.
Рисунок 1.5 Передпліччя являє собою важіль, вісь обертання якого проходить крізь ліктьовий суглоб О (рис. 1.5 ). На важіль діють дві сили: рівнодійна F сил двоголового й плечового м'язів і вага вантажу Р. Сила м'язів прикладена до точки С, в якій вони прикріплюються до ліктьової кістки, а вага вантажу — до кисті. Обидві сили прикладені по один бік від ліктьового суглоба (точки опори), отже, це важіль другого роду. Визначимо моменти сил, що діють на передпліччя (рис.1.5 ): М= — Fа і М2 = Рb При рівновазі важеля М+М2 = 0, або Рb — Fа = 0, звідки F= P Оскільки b > а, то сила м'язів F виявляється більшою від ваги вантажу. При підніманні вантажу людина програє в силі, але виграє в швидкості його переміщення й тому важіль другого роду називають важелем швидкості.
Рисунок 1.6 Стопа також є важелем другого роду. Опорою цього важеля, крізь яку проходить вісь обертання, є головки плюсневих кісток С (рис 1.6 ). До стопи прикладені дві сили: рівнодійна сила м'язів F і сила тяжіння тіла Т. Сила м'язів, яка здійснює піднімання тіла, прикладена до виступу п'яткової кістки, а сила тяжіння — до основи надп'яткової кістки. При рівновазі важеля F а = Тb (рис 1.6), звідки F= T Оскільки b <а, то сила м'язів при ходьбі завжди менша від сили тяжіння тіла. У тілі людини нараховується близько 600 м'язів, які складають до 40 % маси людини. Їм властива еластичність, здатність відновлювати початкову форму після припинення дії сил, які викликають їх деформацію. З віком м'язи змінюються: вони ростуть, збільшуються в об'ємі. Від довжини м'яза залежить його скорочення. У похилому віці товщина м'язових пучків і сила їх зменшується. Проте, якщо людина веде активний спосіб життя, атрофія м'язів сповільнюється. Механічному скороченню м'яза, який здатний трансформувати хімічну енергію в механічну, виконуючи роботу, передує його електричне збудження, вивільнюється медіатор ацетилхолін, який створює потенціал дії. Потенціал дії сприяє вивільненню кальцію, у результаті чого, за рахунок енергії АТФ, вмикається скорочувальний апарат у міофібрилах, який зумовлює пружну деформацію пасивних елементів міофібрил у цілому м'язі. Наслідком дії скорочувального апарату та пружної деформації міофібрил є скорочення м'яза, виникнення м'язової сили і, нарешті, виконання роботи. Важливими характеристиками роботи м'яза є сила і швидкість скоро-чення. Доведено, що між швидкістю скорочення м'яза V та м'язовою силою Р існує гіперболічна залежність (рис. 1.7): (Р + а)(V + b) = (Ро +а)b = а(Vтт + b), (1.6) де Vпшк- максимальна швидкість скорочення м'яза (V=V mах при Р = 0); Ро -сила, яку розвиває м'яз в ізометричному режимі скорочення (коли не змінюється довжина м'яза); а і b – константи.
Р/Ро Рисунок 1.7 При скороченні протягом часу t м'яз виконує роботу: А = РVt. (1.7) Знайшовши V рівняння (1.6) і підставивши у (1.7) отримаємо: A = P + А У процесі скорочення м'яза виділяється певна кількість теплоти Q. Ця величина називається теплопродукцією і залежить лише від зміни довжини х м'яза Q = Аx (1.9)
|
|||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-26; просмотров: 563; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.189.182.15 (0.009 с.) |


 М1+М2+М3+...+Мп= 0 (1.1)
М1+М2+М3+...+Мп= 0 (1.1)
 О а Fr А
О а Fr А
 б Р
б Р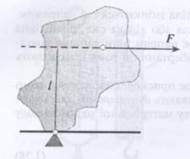 М = F
М = F  l(1.2)
l(1.2)
 А О С
А О С





 F Т
F Т (1.3)
(1.3)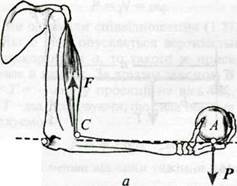 Центр сил тяжіння — це точка прикладання рівнодійної сил тяжіння всіх частинок тіла
Центр сил тяжіння — це точка прикладання рівнодійної сил тяжіння всіх частинок тіла (1.4)
(1.4)

 (1.5)
(1.5)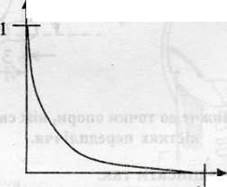 V/Vо
V/Vо (1.8)
(1.8)


