Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Автоматичні системи прямого та непрямого дійства (регулювання), лінійні та нелінійні системи, одноконтурні та багатоконтурні системи. Адаптивні системи.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Классификация систем автоматического управления по связи чувствительного элемента АУУ с исполнительным органом УО По характеру связи чувствительного элемента (ЧЭ) автоматического управляющего устройства (АУУ) с исполнительным органом управляемого объекта системы автоматического управления могут быть прямого и непрямого действия. Системы автоматического регулирования, в которых исполнительный орган УО перемещается непосредственно чувствительным элементом, называются системами прямого регулирования (действия). Такие системы не требуют дополнительного источника энергии, т. к. энергия, необходимая для перемещения исполнительного органа объекта, поступает от ЧЭ. Они просты в изготовлении из-за отсутствия усилительных и исполнительных элементов. Однако, точность регулирования систем прямого действия значительно снижается с ростом мощности выходного сигнала. Примером может служить система прямого автоматического регулирования напряжения генератора постоянного тока (рис. 8.1). Чувствительным элементом системы является электромагнит (ЭМ), сердечник которого механически связан с движком реостата R. Катушка электромагнита измеряет управляемую величину — напряжение генератора Uг — и создает электромагнитную силу Fэм. Эта сила сравнивается с силой пружины Fпр, которая является задающим воздействием и изменяется перемещением винта В. Таким образом, при заданном значении Uг силы Fэм и Fпp уравновешены, и сердечник электромагнита неподвижен. Изменение нагрузки генератора Rн приводит к изменению Uг и соответствующему изменению электромагнитной силы Fэм. Это, в свою очередь, приводит к перемещению сердечника и изменению сопротивления реостата R, а следовательно, к уменьшению или увеличению тока Iв в исполнительном органе объекта — обмотке возбуждения (ОВ). Заданное значение Uг можно менять посредством изменения Fпр. Системой непрямого действия (регулирования) называется система, в которой на исполнительный орган объекта чувствительный элемент воздействует через усилительный и исполнительный элементы. Несмотря на свою сложность, эти системы получили наибольшее распространение в системах судовой электроавтоматики из-за высокой точности регулирования. Примером системы непрямого действия является любой из трех контуров системы управления электроприводом траловой лебедки типа 3KLW – 6,3 (Germany):
— регулирование возбуждения генератора; — регулирование возбуждения первого электродвигателя; — регулирование возбуждения второго электродвигателя.
Рис 8.1. Система прямого автоматического регулирования напряжения генератора постоянного тока.
Каждый контур содержит следующие основные элементы: элемент сравнения (ЭС), усилитель сигнала отклонения (УЭ), широтно-импульсный модулятор (ШИМ), каскад мощных магнитных усилителей (МУ), питающих обмотку возбуждения возбудителя генератора (ВГ) или двигателей (ВД). На рис. 8.2 показана блок-схема контура регулирования одного из двигателей, из которой видно, что управление объектом (двигателем Д) осуществляется путем изменения тока возбуждения. Обмотка возбуждения двигателя ОВД питается от возбудителя ВД,, который вращается асинхронным трехфазным
Рис 8.2. Блок-схема контура регулирования ЭД траловой лебедки типа 3KLW-6,3.
двигателем 380В 50 Гц. Таким образом, управление возбуждением двигателя Д происходит путем воздействия на обмотку возбуждения возбудителя ВД. Введение усилительных (УЭ и ШИМ) и исполнительных (МУ и ВД) элементов в контур регулирования необходимо для усиления сигнала, поступающего с чувствительного элемента ЭС, по мощности и повышения эффективности и быстродействия системы.
Классификация систем автоматического управления по математической записи законов регулирования В зависимости от математического описания процессов, происходящих в САУ, различают линейные и нелинейные системы. Исходя из допущений, принятых при составлении уравнений, описывающих процессы в системе, одна и та же система может быть описана как линейными, так и нелинейными уравнениями. В общем случае, когда линеаризация не приводит к потере качественных особенностей и значительному изменению количественных соотношений, систему стремятся описывать линейными уравнениями. Так, рассмотренные ранее простейшие законы регулирования, как и регуляторы, которые подчиняются этим законам, являются линейными. Система, показанная на рис. 8.2, при небольших отклонениях внешних воздействий можно отнести к линейной.
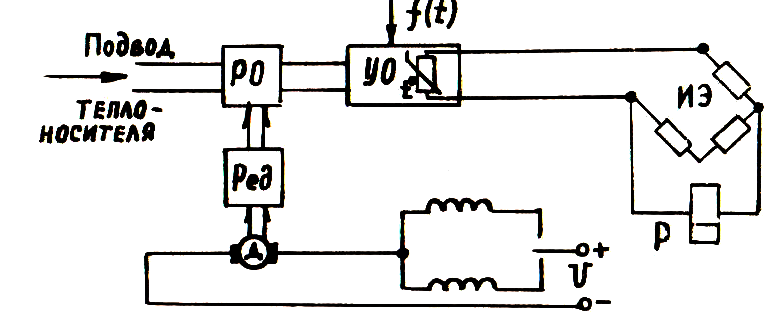
В нелинейных системах (системах, содержащих один или несколько нелинейных элементов) процессы значительно разнообразнее, чем в линейных. При наличии существенных нелинейностей поведение нелинейной системы сильно отличается от поведения линейной. Характер процесса в таких системах часто зависит от величины начального отклонения, вызванного возмущением. Примером нелинейной системы может служить релейная система регулирования температуры, показанная на рис. 8.3. Измерительным элементом (ИЭ) системы является мост с терморезистором, сопротивление которого изменяется в функции управляемой величины θ [температуры управляемого объекта (УО)]. При заданной температуре ток в диагонали моста равен нулю. Направление тока диагонали моста зависит от знака отклонения управляемой величины. Усилительным элементом является трехпозиционное поляризованное реле (Р). Его средний контакт в зависимости от знака отклонения управляемой величины замыкается с верхним или нижним контактом. Из сети через контакт реле подается постоянное напряжение U. При переключении реле с верхнего контакта на нижний электродвигатель Д изменяет направление своего вращения. Двигатель через редуктор (Р) воздействует на регулирующий орган (РО) с целью устранения возникшего отклонения температуры управляемого объекта. Недостатком релейных систем является возможность возникновения незатухающих колебаний (автоколебаний).
Рис. 8.3.. Принципиальная схема нелинейной системы регулирования температуры
Классификация систем автоматического управления по наличию контуров обратной связи. В современных системах автоматического управления и регулирования для повышения качества регулирования вводят местные обратные связи, которые образуют местные замкнутые контуры. Системы, имеющие как главную, так и местные обратные связи, называются многоконтурными. В отличие от одноконтурной системы, имеющей только главную обратную связь, в многоконтурной системе воздействие, приложенное к какой-либо ее точке, может обойти систему и вернуться в исходную точку по нескольким параллельным путям (контурам) обхода. Примером такой системы является система автоматического регулирования напряжения с местной обратной связью.
Рис. 8.4. Система автоматического регулирования напряжения с местной обратной связью
При заданном значении напряжения генератора Uг.зад. движки потенциометров П1 и П2 находятся в среднем положении. Направление магнитного потока дополнительной обмотки электромагнита ώмос зависит от положения движка потенциометра П2. При перемещении движка вниз оно будет встречным по отношению к потоку основной обмотки ωгос при перемещении движка вверх — согласным. Обмотка ώмос совместно с потенциометром П2 образует местную обратную связь, которая охватывает исполнительный двигатель (ИД), усилитель (У) и потенциометр (П1). Потенциометр П2 служит для преобразования угла поворота исполнительного двигателя (ИД) в напряжение постоянного тока. При увеличении напряжения генератора Uг > U г.зад под действием обмотки ώгос движок потенциометра начнет перемещаться вверх и на входе усилителя (У) появится напряжение Uу. В результате усиления к исполнительному двигателю будет приложено напряжение Uд, которое приведет его во вращение.
Вместе с перемещением движка реостата в цепи обмотки возбуждения генератора ИД начнет перемещать движок потенциометра П2, что приведет к росту напряжения на обмотке ώмос. В результате произойдет усиление суммарного магнитного потока, и движок потенциометра П1 возвратится в среднее положение. При уменьшении напряжения генератора (Uг<U г. зад.) действие обмотки ώ гос ослабеет, движок потенциометра П2 опустится вниз, и двигатель ИД будет вращаться в другую сторону. На обмотке ώ мос появится напряжение другой полярности, и движок потенциометра П1 переместится вверх, возвращаясь к среднему положению. Введение местной обратной связи позволяет улучшить поведение системы в переходном режиме, в данном случае исключить возникновение колебании напряжения генератора. Без местной обратной связи ИД вращается до тех пор, пока напряжение генератора не будет равно заданному значению. Однако, из-за инерционности обмотки возбуждения генератора ОВГ после остановки ИД будет происходить дальнейшее изменение тока возбуждения генератора и, следовательно, напряжения генератора. Изменение напряжения приведет к появлению нового отклонения управляемой величины, которое будет устраняться САР. Такой режим может привести к возникновению колебаний напряжения генератора. При наличии местной обратной связи двигатель останавливается несколько раньше момента достижения напряжением заданного значения, что приводит к уменьшению склонности системы к колебаниям и появлению статической ошибки. Появление статической ошибки является недостатком рассмотренной жесткой обратной связи. Классификация систем автоматического управления по степени приспособленности к изменяющимся внешним воздействиям В настоящее время приходится автоматизировать процессы, в которых как характеристики управляемого объекта, так и внешние условия могут изменяться в широком диапазоне, причем характер изменения внешних воздействий и параметров управляемого объекта заранее неизвестен. Так, например, при автоматизации процессов управления судном необходимо учитывать переменный характер воздействия: силы и направления ветра и волны, скорости и направления морского течения и т. д. Вследствие обрастания корпуса характеристики судна также изменяются во времени. Обычные САУ в таких случаях не могут обеспечить высокое качество управления. Поэтому последнее время нашли применение новые САУ, которые называют адаптивными (приспосабливающимися).
Адаптивные системы автоматически приспосабливаются к произвольно изменяющимся внешним воздействиям и параметрам управляемого объекта, изменяя в процессе работы параметры или схему управляющего устройства с целью сохранения заданных показателей качества управления.
Рис 8.5. Схема адаптивной системы автоматического управления.
На рис. 8.5 показана схема адаптивной САУ, содержащая два контура управления. Основной контур управления представляет собой обычную САУ и образован АУУ, управляемым объектом (УО) и главной обратноной связью. Контур адаптации образован устройством адаптации (УА). Для него управляемым объектом является основная САУ. Путем обработки подаваемых сигналов устройство адаптации определяет значение показателя качества САУ, находит отклонение полученного показателя от заданного и воздействует на АУУ таким образом, чтобы устранить это отклонение. Адаптивные системы делятся на самонастраивающиеся и самоорганизующиеся. В самонастраивающихся системах УА на основе анализа изменения показателя качества вырабатывает корректирующее воздействие, изменяющее параметры АУУ основного контура. В самоорганизующихся системах УА изменяет структуру АУУ основного контура. Самоорганизующая система в общем случае не имеет жесткой структуры, а представляет собой совокупность элементов, связанных случайным образом. В процессе эксплуатации путем автоматического поиска с применением вычислительных и логических операций такая система производит построение определенной структуры, которая соответствует поставленной цели управления.
|
||||||||
|
|
Последнее изменение этой страницы: 2016-04-08; просмотров: 607; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.147.27.117 (0.009 с.) |