Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Статичні та астатичні АС: системи непреривного та дискретного дійства; призначення, структурно-функціональні схеми, склад та принцип дії.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
По поведению в установившемся режиме САР делят на статические; и астатические. Если управляемая величина в установившемся режиме зависит от значения внешнего воздействия, то автоматическая система, называется статической, и если не зависит, то с и с т е м а называется астатической. Статические характеристики (рис. 7.1) представляют собой зависимости управляемой величины Х от внешнего возмущения (нагрузки) f (t) в установившемся режиме для статических (прямая 1) и астатических (прямая 2) систем стабилизации. Наклон статической характеристики определяется cтатизмом S, который можно представить в виде S=(x0—xн)/x0
где х0, хн — значения управляемой величины соответственно в режимах холостого хода и номинальной нагрузки. Характерной особенностью статических систем является однозначная зависимость между управляемой величиной и внешним воздействием (нагрузкой) в установившемся режиме. Каждому новому постоянному значению нагрузки соответствует определенное новое значение управляемой величины. В астатических системах, где статизм равен нулю, разным значениям внешнего воздействия в установившемся режиме соответствует одно и то же значение управляемой величины, равное ее заданному значению.
Рис. 7.1. Статические характеристики статической и астатической систем
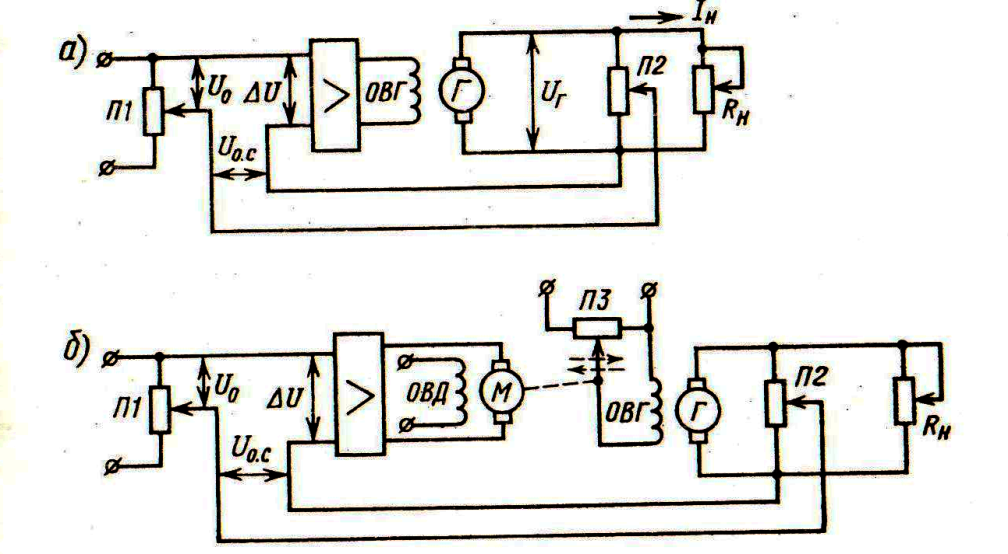
В статической системе стабилизации напряжения генератора постоянного тока (рис. 7.2, а) заданное значение управляемой величины (напряжение генератора U г) задается с помощью vcтaвки регулятора — потенциометра П1 в виде эталонного напряжения Uо. Напряжение Uо.с, пропорциональное напряжению генератора, снимается с потенциометра П2 и по цепи обратной связи подается на вход системы, где сравнивается с эталонным напряжением Uос. Результат сравнения в виде разности ΔU = Uo — Uoс,
Рис. 7.2. Системы регулирования напряжения генератора: а)— статическая; б) — астатическая
поступает на вход усилителя, выходное напряжение которого является питающим для обмотки возбуждения ОВГ генератора. В установившемся режиме напряжение генератора имеет определенное значение и ему соответствует некоторая разность ΔU = Uo — Uoc, отличная от нуля. Допустим, в процессе работы генератора с помощью нагрузочного реостата Rн увеличивается ток нагрузки Iн. При этом напряжение генератора вследствие размагничивающего действия реакции якоря и увеличения внутреннего падения напряжения уменьшается. Это приводит к уменьшению напряжения, снимаемого с потенциометра П2, и вследствие этого к увеличению разности ΔU = Uo--Uo.с. В результате напряжение генератора начинает восстанавливаться. Однако напряжение на зажимах генератора после окончания переходного процесса не достигнет прежнего значения, а будет несколько меньше. Это объясняется тем, что при новой большей нагрузке разность ΔU = Uo--Uo.с. принципиально должна быть больше, чем прежде, что может быть достигнуто в результате уменьшения напряжения Uo.с, пропорционального напряжению генератора. Вместе с тем в данной системе из-за наличия регулятора диапазон изменения управляемой величины при изменении внешнего воздействия будет значительно меньше в установившемся режиме, чем у объекта без регулятора. В этом и проявляется основная задача стабилизации — получение более жесткой статическсой характеристики.
Как видно из приведенной схемы, статические системы состоят только из статических элементов, у которых при постоянном входном воздействии с течением времени устанавливается постоянная выходная величина. Астатическая система стабилизации напряжения генератора (рис. 7.2, б) отличается от рассмотренной тем, что в ее состав входи астатический (интегрирующий) элемент в виде двигателя М, приводящего в движение ползунок потенциометра ПЗ. У астатического элемента при постоянной входной величине выходная величина изменяется с постоянной скоростью, ускорением и т. д. В установившемся режиме ползунок потенциометра ПЗ неподвижен так как разность ΔU = Uo--Uo.с на входе усилителя равна нулю. При изменении нагрузки изменяется напряжение генератора и, как следствие, напряжение Uoc снимаемое с потенциометра П2. Появляется разность напряжений ΔU = Uo--Uo.с на входе усилителя. Двигатель М начинает вращаться и передвигает ползунок потенциометра ПЗ в требуемом направлении до тех пор, пока разность напряжений ΔU = Uo--Uo.с. не станет равной нулю. Таким образом, напряжение на зажимах генератора в установившемся режиме имеет одно то же предписанное значение независимо от направления и изменения нагрузки.
В зависимости от характера действующих в системе сигналов, все САУ делятся на системы непрерывного и дискретного действия. В системах непрерывного действия между входными и выходными величинами отдельных элементов системы существует непрерывная функциональная связь. При непрерывном и плавном изменении входной величины также изменяется выходная величина. Примерами таких систем могут быть системы на рис. 7.2. В системах дискретного действия выходная величина хотя бы одного элемента представляет собой дискретный сигнал, который скачкообразно изменяется во времени. Обычно в дискретных системах присутствуют как дискретные, так и непрерывные сигналы. Процесс преобразования непрерывного сигнала в дискретный называется квантованием. Квантование сигнала производится по уровню, по времени, по уровню и по времени. При квантовании по уровню фиксируются определенные дискретные уровни сигнала в произвольные моменты времени. В результате непрерывно изменяющаяся величина заменяется фиксированными дискретными значениями: Х1,...Х6 (рис. 4.5а). В простейшем случае квантование по уровню осуществляется релейным элементом. Системы дискретного действия, в которых происходит квантование по уровню, называют релейными системами. К таким системам можно отнести судовые системы управления комбинированной холодильной установкой, охлаждения провизионных камер, защиты и синхронизации главных генераторов и др. на транспортных и рыбопромысловых судах. При квантовании по времени фиксируются дискретные моменты времени, при которых уровни сигнала могут принимать произвольные значения (рис. 7.3 б). Квантование сигнала по времени осуществляется импульсным элементом. Системы дискретного действия, в которых происходит квантование по времени, называют импульсными. Примером такой системы может быть импульсная система регулирования температуры (рис. 7.4.). При заданном значении температуры регулируемого объекта θ, а следовательно, при условии равновесия моста, напряжение на выходе импульсного элемента (ИЭ) равно нулю.
Рис. 7.3. Квантование непрерывного сигнала: а – по уровню; б –по времени.
Как только произойдет отклонение температуры от заданного значения, на входе ИЭ появится напряжение разбаланса моста. В этом случае с выхода импульсного элемента на исполнительный двигатель (ИД) будут подаваться импульсы напряжения, ширина которых пропорциональна отклонению. Исполнительный двигатель воздействует на клапан, который регулирует подачу теплоносителя.
Рис 7.4. Принципиальная схема импульсной системы регулирования температуры.
В каждом из элементов непрерывной системы непрерывному изменению выходной величины во времени соответствует непрерывное изменение входной величины. В состав дискретной системы входит хотя бы один элемент дискретного действия, преобразующий непрерывный входной сигнал в последовательность импульсов или в ряд квантованных сигналов. Квантованием (дроблением) называется процесс преобразования непрерывного сигнала в дискретный. Различают три типа квантования: по времени, по уровню, но уровню и времени. В зависимости от используемого типа квантования непрерывного сигнала дискретные системы делят на импульсные (при квантовании по времени), релейные (при квантовании по уровню), цифровые (при квантовании по времени и уровню).
Релейные автоматические системы могут рассматриваться и как нелинейные непрерывные системы с нелинейностью релейного типа. Поэтому к дискретным часто относят лишь импульсные и цифровые автоматические системы.
|
|||||||
|
|
Последнее изменение этой страницы: 2016-04-08; просмотров: 693; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.226.98.244 (0.013 с.) |