Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Загальні положення про системи автоматики: системи автоматичного управління (САУ), системи автоматичного регулювання (САР). Структурно-функціональні схеми таких систем. Уявлення про зворотні зв’язки.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
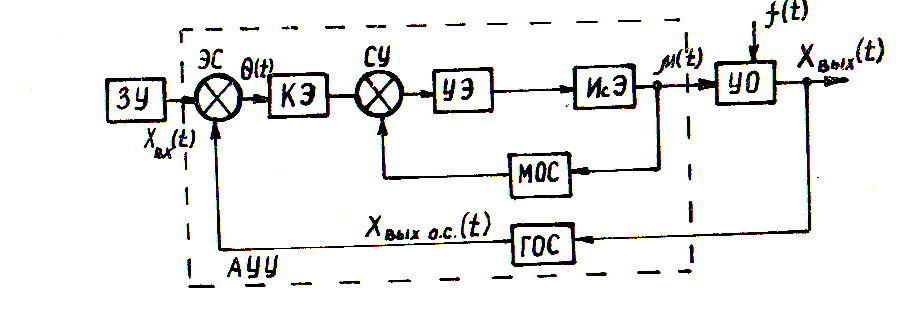
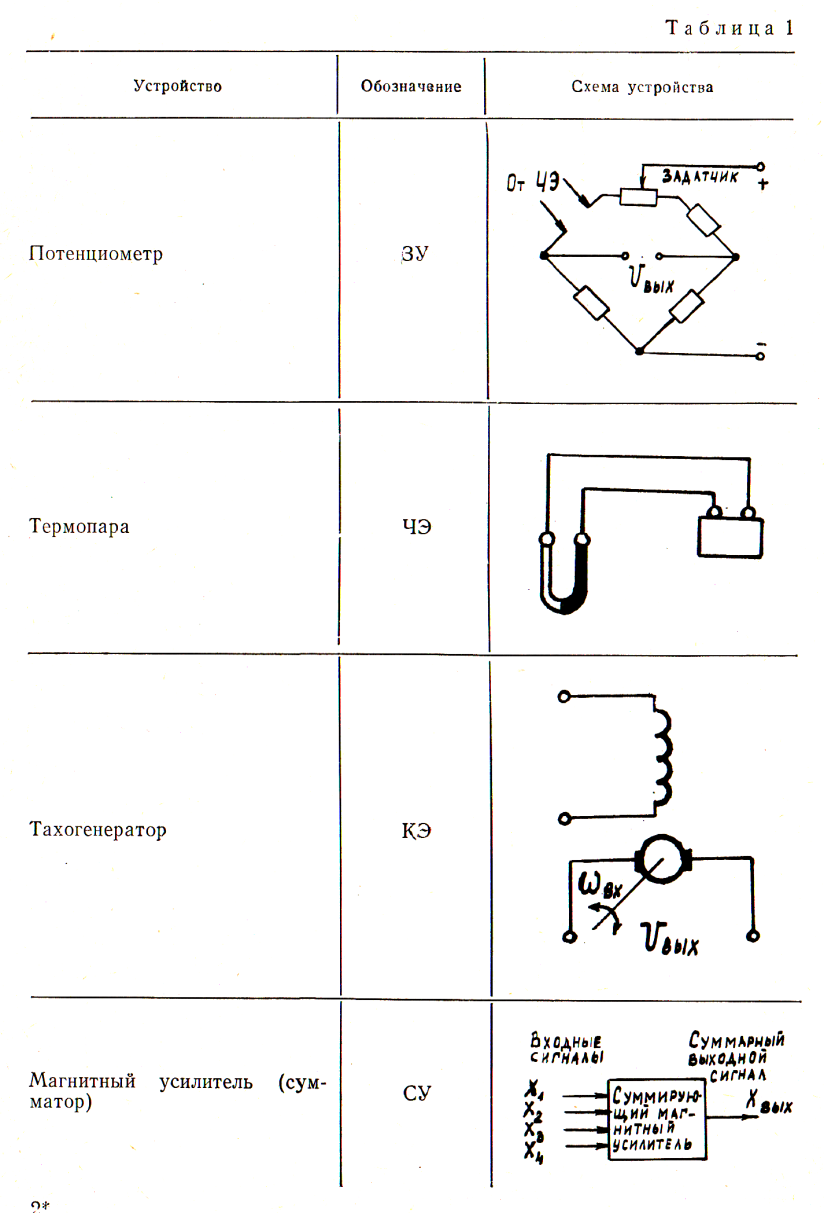
С появлением и развитием автоматических устройств возникла новая отрасль науки и техники — автоматика, — охватывающая теорию автоматического управления и регулирования, а также рассматривающая построение автоматических средств и систем. Система — это совокупность элементов, определенным образом связанных и взаимодействующих между собой. Автоматическая система без участия человека управляет и контролирует поведение объекта или протекание процессов в нем. Автоматизация судовых систем электроавтоматики является лишь одной из составных частей комплексной автоматизации судна. По характеру автоматизируемых функций судовые системы электроавтоматики можно разделить на: — системы автоматического управления (САУ), обеспечивающие возможность управлять судовой электроустановкой и изменять режимы ее работы, приспосабливаясь к изменяющимся внешним условиям без участия человека; — системы дистанционного управления (ДАУ), обеспечивающие возможность на расстоянии включать и выключать отдельные механизмы и устройства, при этом человек непосредственно участвует в процессе управления; — системы автоматического регулирования (САР), обеспечивающие возможность поддержания требуемых параметров в заданных пределах (например, равномерного распределения нагрузки параллельно работающих генераторов), при этом человек освобождается от непосредственного участия в процессе -регулирования; — системы автоматического контроля (САК), обеспечивающие измерение текущих значений контролируемых параметров (например, напряжения, тока, сопротивления, температуры, давления и т. п.), сравнение этих величин с допустимыми значениями и световую и звуковую сигнализацию об отклонении параметров от заданных значений; — системы автоматической защиты и блокировки (САЗ), обеспечивающие предотвращение возникновения аварийных ситуаций или ограничивающие развитие аварии. Независимо от назначения и степени сложности в любой системе автоматического управления выделяются общие для всех систем основные элементы, объединив которые соответствующим образом можно получить функциональную схему, показанную на рис. 3.1. На таких схемах расположение элементов САУ и их взаимосвязь осуществляется на основе выполняемых ими функций в процессе работы системы. Требуемое значение управляемой величины Xвых(t) определяется задающим воздействием Xвх(t), поступающим от задающего устройства (ЗУ). ЗУ формирует задающее воздействие, которое представляет собой физическую величину (напряжение, ток, давление, угол поворота вала и т. д.), и вводится в систему для получения необходимого изменения Xвыx(t) в соответствии с законом управления. В качестве ЗУ может быть использован, например, потенциометр, поставленный в одно из плеч электрического моста. В табл. 1 приведены некоторые примеры элементов судовой электроавтоматики в соответствии с функциональной схемой.
Рис. 3.1. Функциональная схема САУ Элемент сравнения (ЭС) предназначен для сравнения измеряемого значения управляемой величины с задающим воздействием. Если в ЭС кроме сравнения происходит преобразование сигнала, то он называется чувствительным элементом (ЧЭ). Примером такого ЧЭ могут быть: контактные элементы (реле перемещения), потенциометрические элементы, емкостные и индуктивные элементы, термоэлектрические элементы (термопары), контактные и бесконтактные сельсины, вращающиеся трансформаторы, фотоэлементы и т. д. Корректирующий элемент (КЭ) применяется для коррекции (улучшения характеристик системы) при помощи дополнительных узлов и цепей. Он может быть включен последовательно в цепь прохождения сигнала или параллельно этой цепи. Коррекция осуществляется либо путем изменения управляющего воздействия μ(t), либо путем изменения свойств отдельных элементов системы. Изменение μ(t) достигается добавлением к нему других сигналов, зависящих от возмущающего воздействия f(t) (коррекция по возмущению) или от сигнала рассогласования (отклонения) управляемой величины от требуемого значения (коррекция по отклонению). Примером КЭ могут быть тахогенераторы постоянного и переменного тока, генераторы постоянного тока с независимым возбуждением, дифференцирующие или интегрирующие пассивные RC-пепи, стабилизирующие трансформаторы и т. п. Суммирующее устройство (СУ) предназначено для суммирования сигналов от различных элементов, например, электрический мост, суммирующий магнитный усилитель и т. п. Усилительный элемент (УЭ) предназначен для усиления сигналов, поскольку последние обычно являются маломощными и не могут непосредственно использоваться для приведения в действие исполнительного элемента. В системах судовой электроавтоматики применяются электронные, полупроводниковые, магнитные, электромашинные и другие усилители постоянного и переменного тока, знакочувствительные и фазочувствитель-ные, одно-, двух-, трех- и многокаскадные. Исполнительные элементы (ИсЭ) применяются для приведения в движение регулирующих органов объектов управления, от положения которых зависит значение управляемой величины САУ. ИсЭ используются для включения и выключения электрических, механических, гидравлических и пневматических цепей; для сцепления и расцепления вращающихся валов; открывания и закрывания клапанов, золотников, задвижек и т. д. ИсЭ служат также для плавного перемещения или поворота различных частей механизмов, причем скорость перемещения (поворота) зависит от величины подводимого тока. ИсЭ могут быть разделены на электромеханические, гидравлические, пневматические. В качестве ИсЭ широко используются серводвигатели: двигатели постоянного тока, двухфазные и трехфазные асинхронные двигатели, электромагнитные муфты (для автоматического соединения и разъединения вращающихся валов) и релейно-контакторная аппаратура (для включения и выключения различных электрических цепей). Управляемый объект (УО) — это техническое устройство, которое нуждается в оказании специально организованных воздействий извне для правильного выполнения процессов, происходящих в нем. К УО можно отнести само судно, главные судовые энергетические установки, генераторы судовых электростанций, электродвигатели различных судовых электроприводов и т. п. Управляемыми величинами объекта управления могут служить напряжение на зажимах генератора судовой электростанции, давление воздуха пусковых баллонов, температура рефрижераторных камер, частота вращения главного судового двигателя и т. д. Поскольку УО, как правило, самостоятельно не способен противодействовать влиянию любых внешних возмущений, то осуществляется управляющее (специальное воздействие извне) воздействие с целью поддержания управляемой величины в заданных пределах. Местная обратная связь (МОС), как правило, представляет собой параллельно включенный корректирующий элемент. Различают жесткую и гибкую обратные связи. Жесткая обратная связь не содержит интегрирующих и дифференцирующих элементов. При такой связи сигнал на выходе однозначно определяется сигналом на входе. Если в цепи имеются дифференцирующие элементы, то обратная связь называется гибкой. Сигнал гибкой обратной связи зависит от скорости изменения сигнала на входе связи. Гибкие обратные связи с помощью тахогенераторов получили наибольшее распространение в электромеханических системах.
Главная обратная связь (ГОС) обычно состоит из нескольких конструктивных элементов, основным среди которых является преобразователь (П). Преобразователи служат для преобразования одной физической величины в другую или в ту же, но с другими параметрами. С помощью преобразователей осуществляются все основные процессы по преобразованию электрических сигналов: генерирование, модуляция, усиление, выпрямление, инвертирование, преобразование частоты. Это транзисторные и тиристорные преобразователи, фазочувствительные выпрямители, стабилизаторы напряжения, триггеры, бесконтактные логические элементы, трансформаторы, тахогенераторы, индуктивные и температурные датчики, сельсины и т. п. Все рассмотренные элементы САУ, кроме управляемого объекта, представляют собой собственно регулятор системы или автоматическое управляющее устройство (АУУ), которое осуществляет воздействие на управляемый объект в соответствии с законом управления. Таким образом, система автоматического управления представляет собой совокупность управляемого объекта и управляющего устройства, которые взаимодействуют между собой в соответствии с законом управления (рис. 2). Как видно из рис. 3.2, в общем случае на вход АУУ, помимо задающего воздействия Хвх(t) поступают управляемая величина Хвых(t) и возмущающее воздействие f(t). Таким образом, АУУ присоединяется к объекту управления с двух сторон: с одной стороны — к выходу объекта, а с другой — к регулирующему органу на его входе.
Рис. 3.2. Упрощенная схема системы атоматического управления
|
||||
|
|
Последнее изменение этой страницы: 2016-04-08; просмотров: 568; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.117.94.221 (0.008 с.) |