Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Принципи побудови систем автоматики. Класифікація автоматичних систем по принципу автоматичного управління ( відхилення, обурення, комбіновані).Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте Принцип управления по отклонению справедлив для замкнутых САУ и состоит в том, что в автоматическом управляющем устройстве САУ происходит измерение действительного значения управляемой величины и сравнение ее с требуемым значением. Выявленное при этом отклонение формирует управляющее воздействие, которое стремится уменьшить или устранить отклонение управляемой величины. Функциональная схема САУ с принципом управления по отклонению показана на рис.5. 1. Требуемое значение управляемой величины Хвых (t) определяется задающим воздействием поступающим от задающего устройства ЗУ. ХВЫХ(t) измеряется, а если необходимо — преобpазуется в цепи главной обратной связи ГОС и подается на вход элемента сравнения ЭС, который определяет отклонение между управляемой величиной и задающим воздействием θ (t). На выходе АУУ после усиления и преобразования появляется управляющее воздействие μ (t) стремящееся свести отклонение к нулю. В таких системах управляющее воздействие является функцией отклонения, т.е. μ (t) = F [ θ (t) ]
Рис.5. 1. Функциональная схема САУ с принципом управления по отклонению.
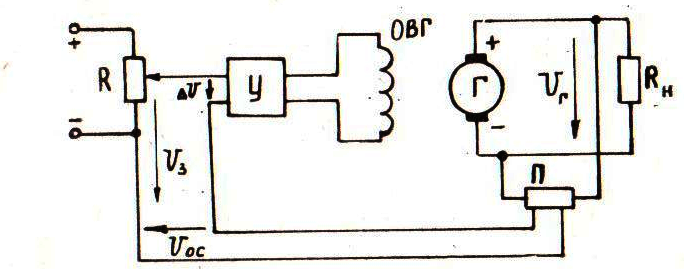
В отличие от разомкнутых САУ с принципом управления по возмущению, в данном случае ни одно из возмущающих воздействий не измеряется. Измеряется лишь одна величина — отклонение, при этом не важно, какими причинами оно вызвано. В этом заключается одно из основных достоинств САУ с принципом управления по отклонению. Другим достоинством рассматриваемых САУ является то, что данный принцип управления применим для объектов, точные характеристики и параметры которых определить трудно или невозможно. Благодаря своим достоинствам, рассматриваемые САУ получили наибольшее распространение в технике. Однако принцип управления по отклонению не дает возможности полностью устранить отклонение, т. к. управляющее воздействие появляется только при наличии отклонения. И, кроме того, в САУ с принципом управления по отклонению возникает проблема устойчивости, поскольку они замкнутые. Примером САУ с принципом управления по отклонению является автоматическая система стабилизации напряжения генератора постоянного тока. Управляемым объектом в данной системе является генератор постоянного тока с независимым возбуждением Г с нагрузкой Rн (рис. 5.2). Под действием изменения тока нагрузки, температуры окружающей среды, тока возбуждения изменяется напряжение генератора Uг.
Рис. 5.2. Принципиальная схема автоматической системы стабилизации напряжения генератора постоянного тока Разность между задающим значением Uз и значением напряжения обратной связи U ос, пропорционального Uг, в виде отклонения ΔU=Uз—Uoс подается на вход усилителя У. При увеличении Uг разность ΔU уменьшается, а при снижении — возрастает. Таким образом, при любых возмущающих воздействиях система стремится удержать напряжение генератора около заданного значения Uз с точностью до ΔU. Изменение заданного напряжения генератора достигается изменением положения движка потенциометра R. Принцип управления по возмущению справедлив для разомкнутых САУ и заключается в том, что для уменьшения или устранения отклонения управляемой величины от требуемого (предписанного) значения возмущающее воздействие измеряется и преобразуется в такое управляющее воздействие, которое компенсирует вызванное отклонение, обеспечивая тем самым требуемый закон управляемой величины. Функциональная схема САУ с принципом управления по возмущению показана на рис. 5.3.
Рис.5.3. Функциональная схема САУ с принципом управления по возмущению.
Возмущающее воздействие f(t) приводит к отклонению управляемой величины Хвых(t) от требуемого значения. Одновременно возмущение подается в АУУ, где происходит его измерение в измерительном элементе (ИЭ) и дальнейшее преобразование. В результате вырабатывается управляющее воздействие μ(t), которое противоположно по знаку и равно по величине возмущающему воздействию. АУУ должно обеспечивать независимость (инвариантность) управляемой величины от возмущающего воздействия. В САУ с принципом управления по возмущению управляющее воздействие является функцией возмущающих воздействий, т. е. μ (t) = F [ f(t) ]. Принцип управления по возмущению применяется в тех случаях, когда известны характеристики объекта и имеется возможность измерения возмущающих воздействий. Это системы автоматического контроля, дистанционного управления, автоматического включения и выключения освещения и т. п. Основным достоинством таких разомкнутых САУ является их простота и возможность полностью скомпенсировать основное возмущающее воздействие, которое измеряется и подается в АУУ. При наличии большого числа возмущающих воздействий и при изменении параметров АУУ (вследствие старения, внешних условий) Хвых(t) может значительно отличаться от требуемого закона ее изменения. Поэтому такие системы применяются для решения более простых задач автоматизации, там, где невысоки требования к точности управления и известны характеристики объекта управления. Примером САУ с принципом управления по возмущению может служить схема управления скоростью двигателя, представленная на рис.5. 4.
Рис. 5.4. Принципиальная схема управления скоростью двигателя с принципом управления по возмущению
Скорость вращения ротора электродвигателя n является управляемой величиной. Возмущающее воздействие (момент нагрузки Мн) измеряется с помощью моментной муфты ММ, напряжение на выходе которой Uн пропорционально Мн. Обмотка управления ОУ2 электромашинного усилителя ЭМУ является простейшим преобразователем. Магнитный поток, создаваемый этой обмоткой, пропорционален подводимому напряжению нагрузки Uн. Магнитный поток ОУ2 складывается с магнитным потоком обмотки ОУ1 к которой подводится задающее воздействие Uзад. Таким образом, ЭМУ выполняет функцию сумматора и усилителя одновременно. Увеличение момента нагрузки на валу управляемого объекта двигателя (Д) приводит обычно к понижению его скорости вращения. В такой системе при увеличении Мн растет Uн, а следовательно, возрастает магнитный поток ОУ2 и результирующее магнитное поле ЭМУ. Это, в свою очередь, приводит к увеличению напряжения двигателя Uд, а следовательно, и к увеличению вращающего момента Мвр. Увеличение вращающего момента Мвр приводит к тому, что двигатель преодолевает возросший Mн при прежней скорости вращения. Таким образом достигается независимость управляемой величины— скорости вращения ротора электродвигателя — от возмущающего воздействия — момента нагрузки — в установившемся режиме. Принцип комбинированного управления сочетает принципы управления по возмущению и по отклонению. В комбинированных системах принцип управления по отклонению реализуется с помощью главной обратной связи, а по возмущению — с помощью связей по возмущению в автоматическом управляющем устройстве. Функциональная схема системы с комбинированным принципом управления показана на рис. 5.5. Независимость управляемой величины Xвых(t) от основных возмущающих воздействий обеспечивается их подачей в АУУ. Цепь обратной связи ГОС ликвидирует влияние всех других возмущающих воздействий. Управляющее воздействие μ (t) в комбинированных системах является функцией отклонения и возмущающих воздействий: μ(t) = F [ θ (t), f(t) ]. В комбинированных системах проявляются достоинства и компенсируются недостатки рассмотренных выше систем. Комбинированные САУ являются наиболее совершенными системами с высокой точностью управления.
Рис. 5.5. Функциональная схема САУ с принципом комбинированного управления.
Примером такой системы может служить схема амплитудно-фазового компаундирования судового синхронного генератора типа МСС, устанавливаемого на транспортных судах постройки 60-х годов.. Данная схема выполнена по принципу амплитудно-фазового компаундирования с электромагнитным сложением составляющих тока и напряжения на суммирующей обмотке ОС трансформатора фазового компаундирования ТФК (рис.5. 6). Трехстержневой трансформатор ТФК имеет четыре обмотки (первичные — токовую ОТ и напряжения ОН, а вторичные — сопротивления ОС и питания ОП), а также магнитный шунт для создания потока рассеяния и увеличения индуктивного сопротивления обмотки ОН, необходимого для сдвига фаз между током и напряжением на 90°. В представленной схеме принцип управления по возмущению осуществляется с помощью токовой обмотки ОТ ТФК, которая трансформирует токовую (компаундирующую) составляющую напряжения на выходе обмотки сопротивления ОС ТФК, включенной на кремниевый выпрямитель В1. Принцип управления по отклонению реализуется цепью обратной связи через обмотку напряжения ОН ТФК. Дроссель отбора (ДО) является регулируемой нагрузкой, включенной на обмотку ОС параллельно выпрямителю В1. При уменьшении управляемой величины (напряжения) на выходе генератора снижается вторичное напряжение на обмотке питания (ОП) цепей управления. Уменьшится также напряжение на выходе выпрямителя В2 и обмотке управления (ОУ) дросселя. При уменьшении насыщения сердечников сопротивление рабочих обмоток ОР дросселя увеличится, что вызовет увеличение напряжения на входе выпрямителя В1. Следовательно, увеличится ток в обмотке возбуждения ОВГ, который является управляющим воздействием, и восстановится напряжение генератора. При увеличении напряжения на выходе между выпрямителем В1 и дросселем ДО в обратном направлении. Резисторы СР и СУ предназначены для регулирования напряжения генератора соответственно при холостом ходе и при работе генератора под нагрузкой.
Рис. 5.6. Принципиальная схема системы амплитудно-фазового компаундирования судового синхронного генератора типа МСС с корректором напряжения.
|
||
|
|
Последнее изменение этой страницы: 2016-04-08; просмотров: 659; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.146.255.206 (0.011 с.) |