Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Датчики частоти обертання: тахогенераторні датчики частоти обертання; датчики частоти обертання з індукційними перетворювачами.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Датчики частоты вращения В судовых датчиках частоты вращения нашли применение тахогенераторы постоянного тока и индукционные преобразователи. Тахогенераторные датчики частоты вращения. Тахогенераторы постоянного тока представляют собой генераторы постоянного тока небольшой мощности с электромагнитным (рис. 16.1) или магнито-электрическим возбуждением. В режиме холостого хода при постоянном магнитном потоке возбуждения Фв выходное напряжение тахогенератора составляет:
Рис. 16.1.Схема тахогенератора постоянного тока
Uвых = Е = с Фвω =kω где ω — угловая скорость вала; k = сФв. При подключении нагрузки напряжение уменьшается на величину падения напряжения в цепи якоря. Выходное напряжение изменяется по линейному закону в функции частоты вращения. Наклон статической характеристики зависит от сопротивления нагрузки, так, статические нагрузки 2, 3 на рис. 16.2 соответствуют сопротивлениям Rн1,Rн2. Уменьшение сопротивления нагрузки (Rн2 < Rн1) приводит к уменьшению крутизны характеристики. На рис. 16.2 показана также статическая характеристика 1, соответствующая режиму холостого хода (Rн =∞). Принципиальная схема тахогенераторного датчика частоты вращения представлена на рис. 16.3 Выходной сигнал тахогенератора Uтг поступает на делитель напряжения, состоящий из резисторов R1, R2, R3, R4. Выходной сигнал делителя напряжения снимается с резистора R4. Подключение тахогенератора к клеммам 7, 8 или 9 зависит от значения напряжения на его выходе.
Рис. 16.2. Статические характеристики тахогенератора постоянного тока
Рис. 16.3 Принципиальная схема тахогенераторного датчика частоты вращения Напряжение с выхода делителя напряжения поступает на вход однополупериодного выпрямителя на операционном усилителе DA1. С выхода этого выпрямителя сигнал подается на вход апериодического звена первого порядка на операционном усилителе DA2. Схема на операционном усилителе DA2 используется в качестве фильтра нижних частот и служит для сглаживания динамических составляющих выходного напряжения тахогенератора. При номинальном значении напряжения тахогенератора выходное напряжение Uвых датчика частоты вращения равно 10 В. Датчики частоты вращения с индукционными преобразователями. Индукционный преобразователь состоит из П-образного магнитопровода, расположенного неподвижно около вала, и стальной перфорированной ленты, закрепленной на валу (рис. 16.4). Между валом и лентой по всей окружности походит резиновая лента. На одном из полюсов магнитопровода установлена обмотка возбуждения, питаемая от источника постоянного тока, на другом — измерительная обмотка. Обмотка возбуждения WB служит для создания постоянного магнитного потока; с измерительной обмотки Wи снимается выходное напряжение Uвых.
Рис.16.4. Индукционный преобразователь датчика частоты вращения.
Между лентой и полюсами есть воздушный зазор. При вращении вала происходит периодическое изменение магнитного сопротивления. Это изменение приводит к изменению магнитного потока обмотки возбуждения. При изменении магнитного потока в измерительной обмотке наводится ЭДС, равная
dФ е = Wн -------- dt Частота выходного сигнала определяется из выражения:
F = nZ / 60
где n — число оборотов гребного вала в минуту; Z— количество отверстий в перфорированной ленте. Из выражения понятно, что частота ЭДС преобразователя не зависит от внешних условий, поэтому точность измерения частоты вращения зависит только от точности измерения частоты ЭДС. Сам преобразователь не вносит погрешности в процесс измерения. В соответствии с выражениями (1.1), (1.2), наряду с частотой ЭДС при изменении частоты вращения происходит изменение и значения ЭДС. При малой частоте вращения ЭДС имеет небольшое значение, поэтому при измерении ее частоты возникают большие погрешности.
Рис 16.5. Индукционный преобразователь частоты вращения с постоянным магнитом.
В индукционных преобразователях в качестве источника постоянного магнитного потока часто вместо обмотки применяют постоянные магниты, а вместо металлической ленты — выступающие детали вращающихся частей машины (рис. 10.5). Принципиальная схема датчика частоты вращения приведена на рис. 16.6. Выходное напряжение индукционного преобразователя (ИП), частота которого изменяется пропорционально частоте вращения вала, имеет произвольную форму. Напряжение произвольной формы индукционного преобразователя подается на формирователь импульсов (ФИ).
Рис. 16.6. Принципиальная схема датчика частоты вращения с индукционными преобразователями
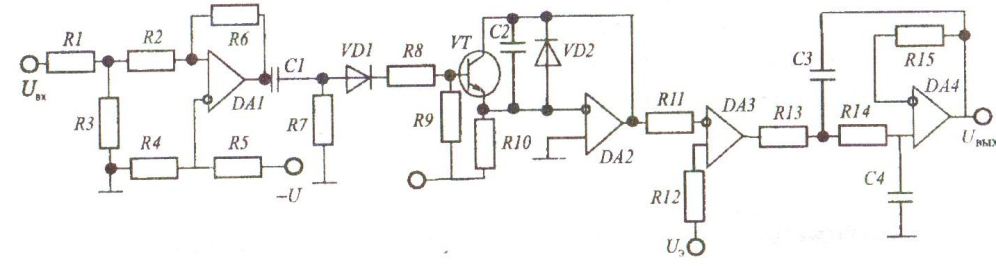
ФИ представляет собой релейное устройство с положительной обратной связью; у него входной сигнал с ИП подается на неинвертирующий вход операционного усилителя DA1. Наличие положительной обратной связи приводит к тому, что при изменении знака входного напряжения происходит скачкообразный переход операционного усилителя из одного насыщенного состояния в другое. Знак выходного напряжения совпадает со знаком входного. ФИ позволяет получить из входного напряжения произвольной формы выходное напряжение прямоугольной формы, с частотой импульсов, пропорциональной частоте вращения вала. Далее прямоугольные импульсы подаются на дифференцирующее звено, состоящее из конденсатора С1 и резистора R 7, которое преобразует прямоугольные импульсы в кратковременные разно-полярные. Подключение диода VD1 обеспечивает прохождение только положительных кратковременных импульсов. Полученные импульсы управляют генератором пилообразного напряжения (ГПН). ГПН основан на использовании интегрирующего устройства на операционном усилителе DA2 и транзистора VT. Выходное напряжение ГПН имеет пилообразную форму с постоянным наклоном и частотой, равной частоте выходного сигнала ИП. Выходной сигнал с ГПН подается на инвертирующий вход операционного усилителя DA3. На инвертирующий вход DA3 подается эталонное напряжение с постоянным значением Ur. Схема на DA3 представляет собой нуль-орган. На выходе нуль-органа появляются импульсы прямоугольной формы с постоянными амплитудой и длительностью, с частотой, пропорциональной частоте вращения вала. Напряжение с нуль-органа поступает на фильтр нижних частот (ФНЧ) второго порядка на операционном усилителе DA4. Выходное напряжение ФНЧ равно среднему значению прямоугольных импульсов нуль-органа, которое изменяется пропорционально их частоте и, следовательно, частоте вращения вала.
Рис. 16.7. Принципиальная схема датчика частоты вращения со ждущим мультивибратором
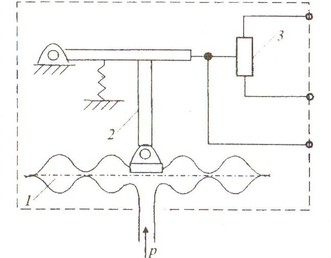
На рис. 16.7 показана принципиальная схема датчика, в котором для получения прямоугольных импульсов с постоянной амплитудой и длительностью применяется ждущий мультивибратор (одновибратор) на операционном усилителе DА2. Время импульса t определяется постоянной времени C2R10 и отношением R9/R8. Если R9/R8 = 10, t≈ O,1 (C2 х R10). Датчик частоты вращения, служащий также для определения направления вращения вала, состоит из двух индукционных преобразователей, смещенных один относительно другого по окружности вала на определенный угол. После предварительной обработки с выхода каждого преобразователя можно получить непрерывную последовательность импульсов. В зависимости от направления вращения вала одна из последовательностей импульсов опережает другую. Реверс вала приводит к изменению чередования последовательностей импульсов, которое определяется логической схемой. 17. Датчики тиску: потенціометрічні, індуктивні, диференційно-трансформаторні, емкісні, тензорезисторні. Магнитопружні і п’єзоелектричні перетворювачі. Датчики давления Датчики давления обычно состоят из двух измерительных преобразователей. Один из них — первый — служит для преобразования давления в механический параметр (перемещение, деформацию, силу, механическое напряжение). Второй преобразователь предназначен для преобразования механического параметра в электрический (изменение сопротивления, индуктивности, емкости, ЭДС, заряда). В качестве первого типа преобразователей используют упругие чувствительные элементы: мембраны, мембранные коробки, сильфоны, трубки Бурдона и др. В качестве второго типа применяют потенциометрические, индуктивные, трансформаторные, емкостные, тензорезисторные. магнитоупругие и пьезоэлектрические преобразователи. В датчике давления с потенциометрическим преобразователем (рис. 17.1) под действием давления происходит перемещение мембранной коробки 1, которое при помощи штока 2 приводит к перемещению движка потенциометрического преобразователя 3.
Рис.17.1. Датчик давления с потенциометрическим преобразователем. Датчик давления с индуктивным преобразователем (Рис 17.2) состоит из мембранного чувствительного элемента 3, к которому прикреплен якорь 5 индуктивного преобразователя 4. Контролируемое давление, поступающее по трубке 1 в полость 2, вызывает перемещение мембраны вместе с якорем, что приводит к изменению индуктивности преобразователя.
Рис. 17.2. Датчик давления с индуктивным преобразователем.
В датчике давления с дифференциально-трансформаторным преобразователем (рис. 17.3.) к свободному концу трубки Бурдона 1 прикреплен якорь 2 преобразователя. При изменении контролируемого давления происходит перемещение якоря, которое приводит к изменению выходного напряжения.
Рис. 17.3. Датчик давления с дифференциально-трансформаторным преобразователем.
В датчике давления с емкостным преобразователем (рис.17.4.) контролируемое давление, поступающее по трубке 3, приводит к перемещению мембраны 2. Мембрана и электрод / представляют собой обкладки емкостного преобразователя. Перемещение мембраны под действием давления вызывает изменение расстояния между обкладками преобразователя, что приводит к изменению его емкости. Датчики давления с тепзорезисторным преобразователем предназначены для измерения динамических давлений. Тензорезисторы могут быть проводниковыми и полупроводниковыми; проводниковые, в свою очередь, подразделяют на проволочные и фольговые (о них будет рассказано ниже). В качестве примера может служить датчик давления с тензорезисторным преобразователем GT-30, разработанный фирмой AUTRONICA и служащий для измерения давления топлива у форсунки. Обычно этот датчик используется только при индицировании двигателя. Диапазон измерений составляет 0...10² МПа. Рабочая температура 0 - 150˚С.
Рис.17.4. Датчик давления с емкостным преобразователем. Аналогичный датчик давления GT-20 предназначен для измерения давления в цилиндрах двигателей внутреннего сгорания. Он устанавливается на индикаторный кран. Диапазон измерения составляет 0...16 МПа. Рабочая температура 0...300 °С. Для обработки сигнала с тензорезисторным преобразованием применяется усилитель CE-11, входящий в состав датчика давления, принципиальная схема которого приведена на рис. 17.5.
Рис.17.5.Датчик давления с тензорезисторным преобразователем.
Тензорезисторный преобразователь R.T включен в мостовую схему с резисторами Rl—R4. Потенциометр R3 служит для балансировки мостовой схемы. Схема на операционном усилителе (ОУ) DA1 представляет собой дифференциальный усилитель, на неинвертирующий вход которого подается постоянное напряжение, определяемое потенциометром R3. На инвертирующий вход DA1 подаются два напряжения: одно из них определяется тензорезистором Rt, второе — поступает с повторителя напряжения на ОУ DA3. Выходной сигнал с DA1 подается на неинвертирующий усилитель DA2, выходной сигнал которого, в зависимости от измеряемого давления, изменяется в диапазоне 0...5 В. При отсутствии давления выходной сигнал при помощи потенциометра R3 делается равным 1 В. Конденсатор СУ и компаратор на ОУ DA4 служат для выделения составляющей выходного сигнала, соответствующей динамическому давлению. Операционные усилители DA5, DA6 и транзисторы VT1, VT2 служат для преобразования выходного напряжения в токовый сигнал, который изменяется в диапазоне 1...5 мА. Оба выхода — по напряжению и по току — могут нагружаться одновременно. Необходимо рассмотреть более подробно принцип действия тензорезисторных преобразователей. Принцип действия тензоре-зисторного преобразователя основан на явлении тензоэффекта. Этот эффект заключается в изменении активного сопротивления проводниковых и полупроводниковых материалов при их механической деформации. В судовых системах применяются, в основном, проводниковые тензорезисторы. Под воздействием внешней силы происходит деформация проводников: как в направлении действия силы, так и в перпендикулярном ей направлении. Активное сопротивление проводника при его неизменной температуре определяегся из следующего выражения: l R = ρ --- S где ρ — удельное сопротивление материала проводника; S — площадь поперечного сечения; l — длина проводника. Изменение сопротивления проводника под воздействием внешней силы обусловлено изменением его длины и поперечного сечения, а также изменением удельного сопротивления материала проводника. Для увеличения чувствительности тензорезисторов для изготовления их выбирают материалы с высоким коэффициентом тензочувствителыюсти, большим удельным сопротивлением; кроме того, их делают с малым поперечным сечением. Наиболее широкое применение в тензорезисторах нашел константан. Этот материал имеет незначительный температурный коэффициент сопротивления, что уменьшает погрешность, вызываемую колебаниями температуры. В тензорезисторах, изготовленных из константана, в широком диапазоне температур сохраняется линейная зависимость между относительной деформацией и изменением сопротивления. Для работы при повышенных температурах рекомендуется использовать тензорезисторы из нихрома. Как было упомянуто выше, проводниковые тензорезисторы подразделяют на проволочные и фольговые. Конструктивное исполнение обоих типов может быть различным. В общем случае проволочный тензорезистор (рис. 17.6, а) представляет собой тонкую тензочувствительную проволоку, уложенную зигзагообразно между двумя электроизоляционными подложками. К концам проволоки присоединяются выводные концы. Для изготовления тензорезисторов применяют проволоку диаметром 0,01...0,05 мм. Электроизоляционные подложки выполняют из папиросной бумаги, лаковой пленки или цемента, скрепляемых клеем или лаком. Зигзагообразную часть тензорезистора называют решеткой, а его продольный размер — базой. Проволочные тензорезисторы обладают сопротивлением 10...1000 Ом и имеют размеры 2...100 мм.
Рис.17.6. Схемы тензорезисторов: а- проволочный; б- фольговый.
Фольговые тензорезисторы (рис. 17.6, б) в принципе аналогичны проволочным. Решетка выполняется из фольги толщиной 0,004...0,012 мм. Эта решетка закреляется между пленками из лака. Фотохимический способ изготовления таких тензорезисто-ров позволяет создать любой рисунок решетки, что является существеным преимуществом фольговых тензорезисторов. Максимальный ток через тензорезистор ограничивается допустимой мощностью, которая зависит от площади охлаждающей поверхности. По сравнению с проволочными фольговые тепзорезисторы имеют большую площадь поперечного сечения проводника при одинаковых размерах резистора, поэтому они могут пропускать больший ток. Максимальная сила тока в проводниковых тензорс-зисторах достигает нескольких десятков миллиампер. В датчиках давления с тензорезисторными преобразователями тензорезисторы наклеиваются на упругие чувствительные элементы в виде колпачков и полусфер. Под действием приложенного давления происходит деформация упругого элемента, которая приводит к изменению сопротивления тензорезистора. Для измерения деформации тензорезистор наклеивается на поверхность контролируемой части механизма таким образом, чтобы его продольная ось совпадала с направлением измеряемой деформации. Прикрепленный к контролируемому объекту, тензорезистор является датчиком деформации. Свойства такого датчика зависят не только от самого тензорезистора, но и от качества его закрепления, которое обычно осуществляют приклеиванием с использованием органических веществ (которые отверждаются вследствие полимеризации). Приклеивание тензорезисторов приводит к тому, что тензоре-зисторные датчики представляют собой датчики разового действия, т.е. могут быть использованы только один раз и не подлежат демонтажу и повторной установке. Градуировка неприклеенного тензорезистора практически невозможна. По этой причине обычно градуируют несколько тензорезисторов из одной партии, приклеивая их на специальную тарировочную балку; другим тензорезисторам той же партии присваивают усредненные характеристики, полученные на нескольких образцах. На современных судах широко применяются магнитоупругие и пьезоэлектрические преобразователи — в автоматических системах измерения давления главных двигателей внутреннего сгорания (ДВС). В состав автоматической системы измерения давления с магнитоупругими преобразователями входят: датчики давления с магнитоанизотропными преобразователями; индукционные преобразователи частоты вращения; схема обработки выходных сигналов; микро-ЭВМ (рис. 17.7). Датчики давления устанавливаются постоянно на индикаторных кранах цилиндров ДВС. Выходные сигналы датчиков подаются на усилители У, с которых сигналы поступают на мультиплексор MUX. В зависимости от команды, поступающей от микро-ЭВМ, мультиплексор подключает выходной сигнал выбранного датчика давления к микро-ЭВМ (см. рис. 17.7).
Рис 17.7. Система автоматического измерения давления с магнитоупругими преобразователями.
Рис.17.8.Магнитоанизотропный преобразователь.
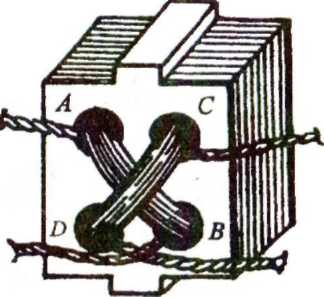
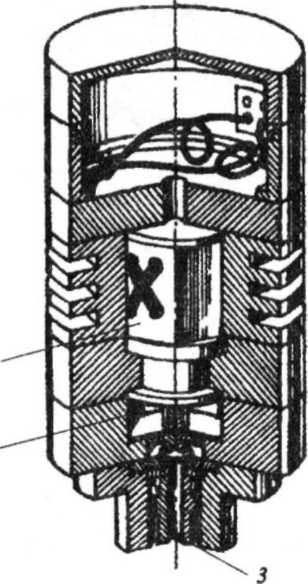
МАП представляет собой разновидность магнитоупругих преобразователей, в которых используется магнитоупругий эффект. Этот эффект заключается в изменении магнитных Свойств ферромагнитных материалов под действием упругих механических напряжений. На рис. 17.8 представлена конструкция магнитоанизотропного преобразователя. Магнитопровод преобразователя представляет собой пакет, набранный из пластин трансформаторного железа. На диагоналях пакета симметрично расположены четыре отверстия. В каждой паре отверстий А, В и С, D) находится обмотка. Обмотки расположены взаимно перпендикулярно. В одну из них (обмотку возбуждения) подается питание из сети переменого тока. Со второй обмотки (измерительной) снимается выходной сигнал. Обмотка возбуждения создает переменное электромагнитное поле. При отсутствии внешнего усилия Р магнитный поток, создаваемый обмоткой возбуждения, не пересекает витки измерительной обмотки, поэтому выходной сигнал равен нулю. При наличии внешнего усилия Р, вследствие изменения магнитных свойств магнитопровода преобразователя, часть магнитного потока пересекает витки измерительной обмотки, что вызывает появление выходного сигнала, представляющего собой напряжение переменного тока. На рис. 17.9 показан датчик давления с магнитоанизотропным преобразователем. Контролируемое давление по индикаторному крану поступает во внутреннюю полость 3 датчика деления и воздействует на мембрану 2, которая сжимает магнитопровод магнитоанизотропного преобразователя 1. Сжатие магнитопровода приводит к изменению выходного напряжения преобразователя. Такой датчик дав
Рис. 17.9. Датчик давления с магнитоанизотропным преобразователем Такой датчик давления предназначен для измерения давления до 30 МПа. Выходное напряжение магнитоупругого преобразователя изменяется пропорционально давлению в цилиндре — от 0 до 100 мВ при изменении давления от 0 до 30 МПа. Для индикации зависимости давления от времени (рис. 17.10.) выходное напряжение подается на осциллограф.
Рис. 17.10. Кривые давления в цилиндре ДВС
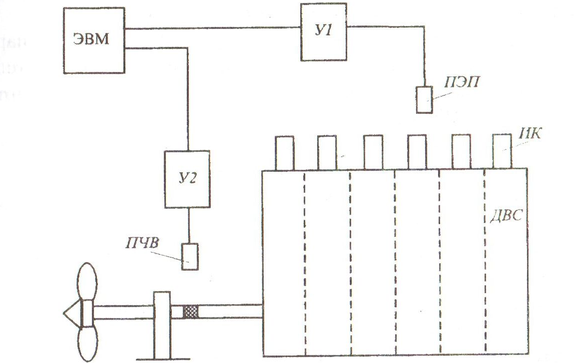
Происходит преобразование временной зависимости р = p(t) в индикаторную диаграмму, представляющую собой зависимость давления в цилиндре от хода поршня р = р(h), где h — ход поршня. Это осуществляется при помощи микро-ЭВМ на основе информации, поступающей с индукционных преобразователей частоты ПЧВ1 и ПЧВ2 (см. рис. 17.7.). Преобразователь ПЧB1 состоит из перфорированной ленты, установленной на валу, и полюсов. Посредством ПЧВ1 отмечают положение вала. Преобразователь ПЧВ2 состоит из полюсов, установленных около маховика. За один оборот маховика с ПЧВ2 поступает сигнал, отмечающий прохождение поршнем первого цилиндра верхней мертвой точки. При использовании подобной системы можно определять следующие параметры ДВС: среднее индикаторное давление; максимальное давление; индикаторную мощность; частоту вращения пила; давление продувочного воздуха; давление сжатия; давление расширения: соответствующее углу 36° после верхней мертвой точки; угол, соответствующий максимальному давлению относительно верхней мертвой точки. Автоматическая система измерения давления с пьезоэлектрическим преобразователем состоит из пьезоэлектрического преобразователя давления {НЭП), индукционного преобразователя частоты вращения ПЧВ, усилителей У1, У2 и ЭВМ
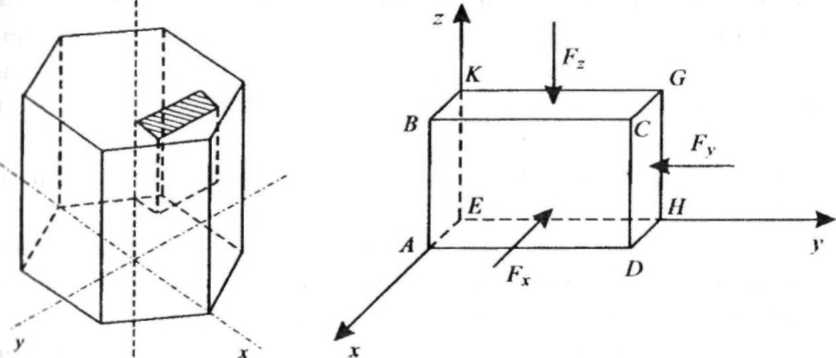
Рис. 17.11. Система автоматического измерения давления с пьезоэлектрическим преобразователем При измерении давления пьезоэлектрический преобразователь (ПЭП) устанавливается на индикаторный кран (ИК) соответствующего цилиндра ДВС. Во время работы ПЭП предусмотрено его охлаждение сжатым воздухом. Сигнал от ПЭП поступает на усилитель, выходное напряжение которого изменяется пропорционально давлению в цилиндре — от 0 до 7,5 В при изменении давления от 0 до 15 МПа. Преобразование временной зависимости р =р (t) в зависимость р = р(h) осуществляется с помощью ЭВМ на основе информации, поступающей от индукционного преобразователя частоты вращения (ПЧВ). Преобразователь (ПЧВ) состоит из ленты с зубцами и полюсов, устанавливаемых с зазором 0,5 мм относительно зубцов. Лента крепится на валу и имеет 30 зубцов, посредством которых отмечается положение вала через каждые 12°. Один из зубцов имеет специальную, отличающуюся от других форму и отмечает прохождение поршнем первого цилиндра верхней мертвой точки. Для индикации кривой p (t) в системе предусмотрен осциллограф. Рассмотренная система позволяет определять такие же параметры ДВС, как и система с магнигоупругими преобразователями. Такая автоматическая система измерения давления разработана фирмой AUTRONiKA. Необходимо остановиться более подробно на принципе действия пьезоэлектрических преобразователей. Они основаны на использовании пьезоэлектрического эффекта (пьезоэффекта), который характерен для некоторых кристаллов. Различают пьезоэффекты прямой и обратный. Прямой заключается в том, что под действием механических напряжений на гранях кристалла возникают электрические заряды. Образный пьезоэффект состоит в том, что под действием электрического поля происходит изменение геометрических размеров кристалла. На использовании прямого пьезоэффекта основаны преобразователи усилий, давлений, ускорений. Явление обратного пьезоэффекта нашло применение в ультразвуковых генераторах, вибраторах и т.д. Наиболее сильно пьезоэффект проявляется у кварца, турмалина, а также у сегнетоэлектриков: сегнетовой соли, титаната бария и др. На рис. 17.12 изображен кристал кварца с соответствующими осями симметрии: z — главная или оптическая ось; х — электрическая ось; y — механическая или нейтральная ось. Пьезочувствительный элемент (рис. 17.13) вырезают из кристалла кварца. Он имеет форму параллелепипеда, грани которого ориентированы относительно осей кристалла соответствующим образом.
Рис. 17.12. Кристалл кварца Рис. 17.13. Пьезочувствительный элемент
При действии силы Fx вдоль электрической оси x на гранях ABCD) и ЕКGН, перпендикулярных оси х, возникают разнонолярые электрические заряды (см. рис. 17.13). Величина таких зарядов gx не зависит от геометрических размеров пьезочувствителыюго элемента Пьзомодуль характеризует чувствительность пьезоэлектрического материала и определяет величину электрического заряда, возникающего при приложении определенной силы. Изменение знака приложенной силы Fх приводит к изменению знака зарядов. Такой эффект называется продольным пьезоэффектом. При действии силы Fy, направленной вдоль оси у, на тех же гранях возникают также разнополярные заряды gy, величина которых зависит от приложенной силы и геометрических размеров граней. Это явление известно как поперечный пьезоэффект. При поперечном пьезоэффекте знак зарядов противоположен знаку зарядов, возникающих при продольном пьезоэффекте под воздействием сил того же направления. При действии силы Fz вдоль оси z пьезоэффект не наблюдается. При сжатии датчика вдоль оси у тонкая кристаллическая пластина легко изгибается, поэтому явление поперечного пьезоэффекта крайне редко применяется в датчиках давления и высокочувствительных датчиках усилий. Следует также отметить, что для измерения зарядов требуется усилитель с большим входным сопротивлением.
|
||||
|
|
Последнее изменение этой страницы: 2016-04-08; просмотров: 1108; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.171.136 (0.014 с.) |