
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Разработка и моделирование отдельных несложных модулей и мехатронных системСодержание книги
Поиск на нашем сайте
Имени Гагарина Ю.А.» Профессионально-педагогический колледж
Методические рекомендации по выполнению ПРАКТИЧЕСКИХ рАбот по дисциплине Разработка и моделирование отдельных несложных модулей и мехатронных систем Для специальности Автоматизация технологических процессов и производств (по отраслям)
УТВЕРЖДАЮ Заместитель директора _________Л.И. Рожкова «___»_______2015 г.
Методические рекомендации разработаны на основе Федерального государственного образовательного стандарта (далее ФГОС) по специальностям среднего профессионального образования далее (СПО) для специальности 15.02.07 Автоматизация технологических процессов и производств (по отраслям)
Разработчик: Цыбина Татьяна Васильевна, преподаватель ППК СГТУ имени Гагарина Ю.А.
СОГЛАСОВАНО
Зам. Директора ППК СГТУ имени Гагарина Ю.А. _________________ Л.И. Рожкова
Начальник НМО ППК СГТУ имени Гагарина Ю.А. _________________ Н.М. Лисицкая
Начальник учебного отдела ППК СГТУ имени Гагарина Ю.А. __________ О.В. Зимкова
Зав. отделением ППК СГТУ имени Гагарина Ю.А. ________________ И.В. Алексеева
Председатель МК Технических специальностей ________________ Е.В. Панфирова
Содержание
Пояснительная записка Практические занятия по дисциплине «Разработка и моделирование отдельных несложных модулей и мехатронных систем» состоят из обязательных аудиторных занятий по специальности 15.02.07 Автоматизация технологических процессов и производств (по отраслям) в количестве 60 часов. Данные работы дают возможность студентам приобрести навыки разработки и моделирования несложных систем автоматизации с учетом специфики технологических процессов. Тематика и содержание практических занятий соответствуют рабочей программе, разработанной в соответствии с ФГОС по специальностям СПО. В результате освоения учебной дисциплины обучающийся должен иметь практический опыт: - разработки и моделирования несложных систем автоматизации и несложных функциональных блоков мехатронных устройств и систем. уметь: - определять наиболее оптимальные формы и характеристики систем управления; - составлять структурные и функциональные схемы различных систем автоматизации, компонентов мехатронных устройств и систем управления; - применять средства разработки и отладки специализированного программного обеспечения для управления технологическим оборудованием, автоматизированными и мехатронными системами; - составлять типовую модель АСР (автоматической системы регулирования) с использованием информационных технологий; - рассчитывать основные технико-экономические показатели, проектировать мехатронные системы и системы автоматизации с использованием информационных технологий; знать: - назначение элементов и блоков систем управления, особенности их работы, возможности практического применения, основные динамические характеристики элементов и систем элементов управления; - назначение функциональных блоков модулей мехатронных устройств и систем, определение исходных требований к мехатронным устройствам путем анализа выполнения технологических операций; - технические характеристики, принципиальные электрические схемы; - физическую сущность изучаемых процессов, объектов и явлений, качественные показатели реализации систем управления, алгоритмы управления и особенности управляющих вычислительных комплексов на базе микроконтроллеров и микроЭВМ; - основы организации деятельности промышленных организаций; - основы автоматизированного проектирования технических систем.
Перечень практических работ
Практическая работа №1 Практическая работа №2 Интегральный регуляторы. Автоматические регуляторы, у которых одному и тому же значению регулируемой величины могут соответствовать различные положения регулирующего органа, называется интегральными, или астатическими (astatos – неустойчивый, беспокойный). Скорость перемещения регулирующего органа этих регуляторов, тем больше, чем больше отклонение регулируемой величины от заданного значения. Рассмотрим принцип работа регулятора на примере принципиальной схемы гидравлического И-регулятора косвенного действия (рис.1). При изменении давления p в трубопроводе изменяется давление на сильфон 1, дно которого перемещается, что ведет к повороту рычага АВС относительно точки А и перемещению поршней золотника 2 вверх или вниз. Когда p больше заданного, тогда дно сильфона переместится вниз, рычаг АВС повернется по часовой стрелке, поршни золотника отпустятся также вниз и масло под давлениемначнет поступать из камеры e цилиндра золотникового устройства в полость m цилиндра исполнительного механизма 7. Поршнь исполнительного механизма (ИМ), связанный штоком с регулирующим органом (шибер) 6, начнет перемещаться вверх, увеличивая степень открытия шибера; это поведет к снижению давленият p. В результате снижения давления сильфон 1 разжимается, возвращая рычаг АВС в исходном положение, поршни золотника перекрывают доступ масла в цилиндр ИМ, регулирующее действие прекращается. Во время перемещения поршня ИМ вверх масло из полости n цилиндра вытесняется по трубке через камеру d цилиндра золотникового устройства и срабатывается на слив 5. Слившееся масло очищается и вновь подается в камеру e специальной насосной установкой.
Рис.1. Принципиальная схема И–регулятора косвенного действия:
Если предположить, что давление p стало ниже заданного, то дно сильфона 1 переместится вверх, рычаг АВС повернется против часовой стрелки, переместив поршни золотника вверх, и масло через полoсть e будет поступать в полость n цилиндра ИМ. Это поведет к закрытиюшибера и увеличению давления p. При этом масло из полости цилиндра ИМ через полость f цилиндра золотникового устройства поступает на слив. Заданное значение регулируемой величины устанавливается с помощью задатчика 8. Когда усилия, развиваемые сильфоном и пружиной задатчика, равны рычаг АВС находится в нейтральном положении и масло из камеры e не поступает в цилиндр ИМ. В И-регуляторах отсуствует обратная связь, они просты по устройству. Важнейшей их особенностью является то, что независимо от величины нагрузки регулируемого объекта они приводят регулируемую величину к заданному значению. И-регуляторы имеют некоторые недостатки, обусловлеными их динамическими свойствами. Малое отклонение регулируемой величины от заданного значения, И-регулятор продолжать перемещать регулирующий орган вплоть до положения полного открытия или закрытия.Перемена направления движения РО наступает лишь тогда, когда регулируемая величина проходит заданное значение. Закон регулирования предусматривает воздействие регулятора со скоростью, пропорционально отклонению регулируемой величины, и описывается уравнением.
Здесь S0 –специально рассчитываемый настроечный параметр регулятора. Знак минус означает, что при положительном отклонении регулируемой величины РО перемещается в сторону закрытия, а при отрицательном отклонении (уменшения против заданного значения) – в сторону открытия. Уравнение регулятора в интегральной форме:
Передаточная функция регулятора имеет вид
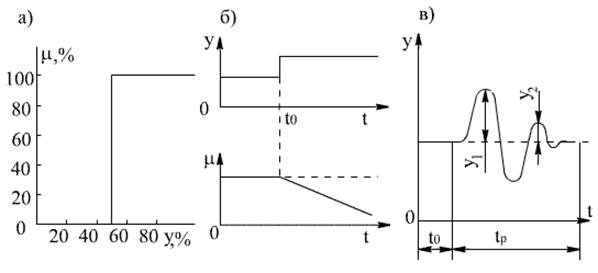
На рис.2,а показана статическая характеристика И-регулятора. Когда регулируемая величина y ниже заданного значения, регулирующий орган m находится в крайнем нижнем положения. Как только регулируемая величина достигнет заданного значения, РО начнет перемещатся в сторону открытия и может остановиться в любой точке вертикального отрезка характеристик. Начиная с момента t0, когда регулируемая величина y скачкообразно изменилась, РО перемещается с постоянной скоростью, изменяя приток (рис.2, б).
В результате действия регулятора регулируемая величина y приходит к заданному значению через некоторое время tр называемое временем регулирования; причем переходный процесс является колебательным, затухающим (рис.2, в). И–регулятор применяется только в системах самовыравниванием, в противном случае система будет неустойчивой.
Рис.3. Принципиальная схема (а) и динамическая характеристика (б) И –регулятора прямого действия:
На рис3,а показано схема И-регулятора прямого действия. На трубопроводе 1 с помощью фланцевых и болтовых соединений укреплен корпус регулятор 7. Если регулируемая величина – давления p после регулятора – будет изменяться, изменение давления через импульсную линию 8 и вентиль 9 будет передаваться на мембрану 4 ИМ, связанную с РО 6 с помощью штока 5. В точке m имеется шарнир, соединяющий шток с рычагом 3, на котором укреплен груз 2, являющийся задающим устройством. Регулируемое давлание p зависит от притока среды, т.е. от степени открытия РО 6. Когда p равно заданному значению, усилия, развиваемые мембранной 4 и грузом 2, равны, и шток 5 неподвижен. При увеличении или уменьшении давления по сравнению с задданным шток и РО 6 будет перемещатся соответственно вниз или вверх. Скорость перемешения пропорцинальна отклонению фактической величины регулируемого давлания от заданной. Как видно из графика (рис.3,б) при изменении нагрузки x объекта в момент t0 начинает изменяться регулируемая величина y и перемещаться регулирующий орган. Изменение перемещения регулирующего органа происходит в момент перемены знака регулируемой величины (точки t1,t2). Порядок работы: 1. Ознакомиться с руководством по выполнению практической работы, получить задание у преподавателя. 2. Изучить материалы методических указаний и литературы. 3. Подготовить отчет. Отчет по работе должен содержать: 1. Тему и цель работы. 2. Выполненное задание Рекомендуемая литература: Основная литература: 1. Афонин, А. М. Теоретические основы разработки и моделирования систем автоматизации: Учебное пособие для сред. проф. образования / А.М. Афонин, Ю.Н. Царегородцев, А.М. Петрова и др. - М.: Форум: ИНФРА-М, 2014. - 192 с. 2. Иванов, А.А. Автоматизация технологических процессов и производств: Учебное пособие для высш. учеб. заведений.- 2-e изд., испр. и доп. - М.: Форум: ИНФРА-М, 2015. - 224 с. Дополнительная литература: 1. Шишмарев В.Ю. Автоматика: Учебник для сред. проф. образования.- М.: Автоматика, 2005.- 288 с. Практическая работа №3 Практическая работа №4 Косвенные измерения При прямых измерениях не всегда удается получить значение всех исследуемых величин (токов, напряжений, мощности, фазы и др.) методом прямого измерения. Это обусловливается отсутствием специальных приборов прямого измерения или невозможностью подключения прибора к некоторым элементам цепи и другими причинами. Кроме того, не всегда целесообразно производить непосредственное измерение всех интересующих величин, если они могут быть получены с достаточной точностью из функциональных зависимостей, связывающих их с измеряемыми величинами. Это позволяет проводить эксперимент быстрее и с меньшими аппаратурными затратами за счет уменьшения числа измерений. Измерение тока с помощью электронных вольтметров. Косвенный метод измерения тока с помощью электронного вольтметра заключается в следующем. В ветвь, в которой необходимо измерить ток, последовательно с нагрузкой включают образцовый резистор R 0. Падение напряжения на этом резисторе измеряют с помощью электронного вольтметра, так как он работает в широком диапазоне частот и потребляет от измеряемой цепи малую мощность, что способствует обеспечению минимума методической погрешности. Ток, текущий через резистор R 0, а следовательно, и по всей цепи (рис.6), определяется законом Ома:
Рис.6. Измерение тока с помощью электронного вольтметра
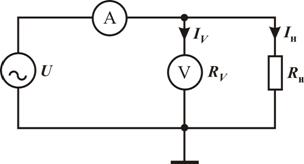
Включать резистор R 0следует в разрыв проводника, идущего от корпуса генератора. В этом случае корпусная точка измерительного прибора соединяется с корпусом генератора, что обеспечивает меньшее влияние помех и стабильность работы вольтметра. Минимум методической погрешности обеспечивается при правильном выборе сопротивления резистора R 0. Чем меньше сопротивление R 0, тем меньше оно оказывает влияние на ток, протекающий в искомой ветви. С другой стороны, чем меньше падение напряжения на резисторе, тем труднее его точно измерить, поскольку больше сказывается влияние различных наводок, увеличение погрешности вольтметра на малых пределах измерения. Поэтому сопротивление R 0, а, следовательно, падение напряжения на нем должны быть наибольшими. В этом случае принимают компромиссное решение, выбирая сопротивление R 0 по условию: R 0 < 0,1 Z Н, здесь Z Н– модуль сопротивления ветви в том месте, где измеряется ток. В этом случае ток в ветви при включении резистора R 0изменится незначительно. Значение сопротивления цепи Z Н можно определить с помощью приближенного предварительного расчета или экспериментально. В лабораторных стендах имеются эталонные резисторы, сопротивление которых составляет 1 Ом, или любые другие, набранные с помощью магазинов сопротивления. Для этих целей можно использовать также резисторы цепи с известным сопротивлением. Косвенный метод измерения тока наиболее широко применяется в цепях переменного тока с частотой от 500 Гц до 10 МГц. Измерение мощности. Сущность косвенного измерения мощности в цепях постоянного тока заключается в измерении с помощью вольтметра и амперметра напряжения U и тока I цепи, в вычислении мощности по ранее приведенной формуле P = UI. Анализ показывает, что погрешность измерения мощности будет минимальной при включении измерительных приборов по схеме, приведенной на рис. 7,а, если выполняется условие
где
а) б) Рис.7. Электрическая схема для измерения мощности Учитывая, что RV является весьма большим, а RА – весьма малым, можно считать I ≈ I н, U ≈ U н. Для известного сопротивления нагрузки R н потребляемая им мощность определяется из выражения P= I 2 R н. Для измерения мощности косвенным методом в цепях переменного тока применяются амперметр, вольтметр и фазометр. При этом активная мощность Р определяется по формуле Если прямым методом измерены значения напряжения U, тока I и мощности P, величина cosφ определяется расчетным путем: сosφ = Измерение параметров электрической цепи R, С, L, Z. Основными элементами электрической цепи с сосредоточенными параметрами являются: резистор, конденсатор, катушка индуктивности. Им соответствуют основные параметры: активное сопротивление электрическому току R, емкость С, индуктивность L. Метод амперметра-вольтметра. Этот метод основан на раздельном измерении тока I в цепи измеряемого сопротивления RХ и напряжения U на его зажимах и на последующем вычислении значения RХ по показаниям измерительных приборов: RХ = При измерении малых сопротивлений порядка 0,01…100 Ом постоянному току применяют схему, показанную на рис. 8.8,а. С помощью реостата R 1 устанавливают приемлемое значение тока в цепи.
а)
б) Рис.8. Измерение параметров электрической цепи
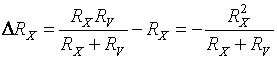
В схеме (см. рис.8,а) вольтметр показывает значение напряжения на зажимах RХ (U = UХ), амперметр – сумму токов IА = IV + I, следовательно
где IV – ток, проходящий через вольтметр; RV – внутреннее (входное) сопротивление вольтметра RV >> RX, то RХ ≈ Абсолютная методическая погрешность Δ RХ определяется по формуле
а относительная погрешность (в %)
Для измерения больших сопротивлений (до сотен кОм и более) применяют схему (рис.8,б), где амперметр регистрирует значение тока в цепи RХ (I = IА), а вольтметр – сумму падений напряжений (U + UA). По показаниям приборов можно вычислить результат измерения
где RА – внутреннее сопротивление амперметра. Абсолютная погрешность Учитывая, что RА << RX, можно считать U ≈ UV. Нужно иметь в виду, что погрешность измерения методом вольтметра и амперметра всегда больше суммы приведенных погрешностей используемых приборов. Однако, считая, что знак погрешностей измерения известен, их можно всегда учесть. Метод амперметра-вольтметра можно применять для измерения на переменном токе модуля полного сопротивления цепи ZХ по схеме, представленной на рис.9.
Рис.9. Электрическая схема для измерения модуля полного сопротивления цепи
где R, X – соответственно активная и реактивная составляющие сопротивления. Для обеспечения минимальной погрешности измерения входное сопротивление вольтметра на частоте измерения должно удовлетворять условию Z вх >> ZХ. Из предыдущего выражения следует, что метод амперметра-вольтметра можно применять для измерения активного сопротивления резистора переменному току R, когда его индуктивными и емкостными составляющими сопротивления можно пренебречь; а также для измерения индуктивности L катушки и емкости С конденсатора, отличающихся высокой добротностью (т.е. когда активное сопротивление катушки RL чрезвычайно мало, а сопротивление изоляции конденсатора весьма велико). В этом случае
где f – частота питающего напряжения.
Порядок работы: 1. Ознакомиться с руководством по выполнению практической работы, получить задание у преподавателя. 2. Изучить материалы методических указаний и литературы. 3. Подготовить отчет. Отчет по работе должен содержать: 1. Тему и цель работы. 2. Выполненное задание.
Рекомендуемая литература: Основная литература: 1. Афонин, А. М. Теоретические основы разработки и моделирования систем автоматизации: Учебное пособие для сред. проф. образования / А.М. Афонин, Ю.Н. Царегородцев, А.М. Петрова и др. - М.: Форум: ИНФРА-М, 2014. - 192 с. 2. Иванов, А.А. Автоматизация технологических процессов и производств: Учебное пособие для высш. учеб. заведений.- 2-e изд., испр. и доп. - М.: Форум: ИНФРА-М, 2015. - 224 с. Дополнительная литература: 1. Шишмарев В.Ю. Автоматика: Учебник для сред. проф. образования.- М.: Автоматика, 2005.- 288 с. Практическая работа №5 Практическая работа №6 Датчики температуры
Биметаллический датчик температуры сделан из двух разнородных металлических пластин, скрепленных между собою. Различные металлы имеют различный коэффициент расширения при той или иной температуре. Например, константан практически не расширяется при температуре, железо, напротив испытывает заметное расширение. Если полоски из этих металлов скрепить между собой и нагреть (или охладить), то они изогнутся. В биметаллических датчиках пластинки замыкают или размыкают контакты реле, или двигают стрелку индикатора. Диапазон работы биметаллических датчиков от -40 С до +550 С. Биметаллические датчики используют для измерения поверхности твердых тел, реже для измерения температуры жидкости. Основным преимуществом датчиков является простота и надежность конструкции, возможность работы без электрического тока, низкая стоимость. Вместе с тем, биметаллические датчики температуры имеют большой разброс характеристик, а так же большой гистерезис переключения, особенно при низких температурах. Основные области применения биметаллических температурных датчиков – автомобильная промышленность, системы отопления и нагрева воды.
Термопары представляют собой две проволоки из различных металлов, сваренных между собой на одном из концов. Термоэлектрический эффект открыл немецкий физик Зеебек в первой половине 19-го века. Он открыл, что если соединить два проводника из разнородных металлов таким образом, что бы они образовывали замкнутую цепь и поддерживать места контактов проводников при разной температуре, то в цепи потечет постоянный ток. Экспериментальным путем были подобраны пары металлов, которые в наибольшей степени подходят для измерения температуры, обладая высокой чувствительностью, временной стабильностью, устойчивостью к воздействию внешней среды. Это например пары металлов хромель-аллюмель, медь-константан, железо-константан, платина-платина/родий, рений-вольфрам. Каждый тип подходит для решения своих задач. Термопары хромель-алюмель (тип К) имеют высокую чувствительность и стабильность и работают до температур вплоть до 1300 С в окислительной или нейтральной атмосфере. Это один из самых распространенных типов термопар. Термопара железо-константан (тип J) работает в вакууме, восстановительной или инертной атмосфере при температурах до 500 С. При высоких температурах до 1500 С используют термопары платина- платина/родий (тип S или R) в керамических защитных кожухах. Они прекрасно измеряют температуру в окислительной, нейтральной среде и вакууме.
Термометры сопротивления это резисторы, изготовленные из платины, меди или никеля. Это могут быть проволочные резисторы, либо металлический слой может быть напыленным на изолирующую подложку, обычно керамическую или стеклянную. Платина чаще всего применяется в термометрах сопротивления из-за ее высокой стабильности и линейности изменения сопротивления с температурой. Медь используется в основном для измерения низких температур, а никель в недорогих датчиках для измерения в диапазоне комнатных температур. Для защиты от внешней среды платиновые термометры сопротивления помещают в защитные металлические чехлы и изолируют керамическими материалами, такими как оксид алюминия или оксид магния. Такая изоляция снижает так же воздействие вибрации и ударов на датчик. Однако вместе с дополнительной изоляцией растет и время отклика датчика на резкие температурные изменения. Платиновые термометры сопротивления одни из самых точных датчиков температуры. Кроме того, они стандартизированы, что значительно упрощает их использование. Стандартно производятся датчики сопротивлением 100 и 1000 Ом. Изменение сопротивления таких датчиков с температурой дается в любых тематических справочниках в виде таблиц или формул. Диапазон измерений платиновых термометров сопротивления составляет -180 С +600 С. Несмотря на изоляцию, стоит оберегать термометры сопротивления от сильных ударов и вибрации.
Термисторы. В этом классе датчиков используется эффект изменения электрического сопротивления материала под воздействием температуры. Обычно в качестве термисторов используют полупроводниковые материалы, как правило, оксиды различных металлов. В результате получаются датчики с высокой чувствительностью. Однако большая нелинейность позволяет использовать термисторы лишь в узком диапазоне температур. Термисторы имеют невысокую стоимость и могут изготавливаться в миниатюрных корпусах, позволяя увеличить тем самым быстродействие. Существует два типа термисторов, использующих положительный температурный коэффициент – когда электрическое сопротивление растет с повышением температуры и использующих отрицательный температурный коэффициент – здесь электрическое сопротивление падает при повышении температуры. Термисторы не имеют определенной температурной характеристики. Она зависит от конкретной модели прибора и области его применения. Основными достоинствами термисторов является их высокая чувствительность, малые размеры и вес, позволяющие создавать датчики с малым временем отклика, что важно, например, для измерения температуры воздуха. Безусловно, невысокая стоимость так же является их достоинством, позволяя встраивать датчики температуры в различные приборы. К недостаткам можно от
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-23; просмотров: 1783; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.169 (0.011 с.) |







 , где U 0 – показание вольтметра, включенного параллельно резистору R 0.
, где U 0 – показание вольтметра, включенного параллельно резистору R 0.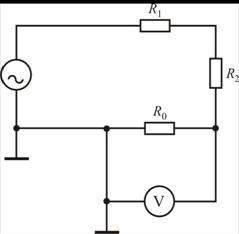
 ,
, – сопротивление нагрузки; RА – сопротивление амперметра;
– сопротивление нагрузки; RА – сопротивление амперметра;  – сопротивление вольтметра, или по схеме рис. 7,б при условии
– сопротивление вольтметра, или по схеме рис. 7,б при условии .
.

 .
.
 .
.

 ,
, .
. ,
, .
. ,
, и относительная (в %)
и относительная (в %)  .
.
 В этом случае
В этом случае ,
, ,
,  ,
,






