Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Тема: построение и анализ схем интегральных автоматических регуляторов.Содержание книги
Поиск на нашем сайте Цель работы: построить и проанализировать схему интегральных автоматических регуляторов. Общие положения: Интегральный регуляторы. Автоматические регуляторы, у которых одному и тому же значению регулируемой величины могут соответствовать различные положения регулирующего органа, называется интегральными, или астатическими (astatos – неустойчивый, беспокойный). Скорость перемещения регулирующего органа этих регуляторов, тем больше, чем больше отклонение регулируемой величины от заданного значения. Рассмотрим принцип работа регулятора на примере принципиальной схемы гидравлического И-регулятора косвенного действия (рис.1). При изменении давления p в трубопроводе изменяется давление на сильфон 1, дно которого перемещается, что ведет к повороту рычага АВС относительно точки А и перемещению поршней золотника 2 вверх или вниз. Когда p больше заданного, тогда дно сильфона переместится вниз, рычаг АВС повернется по часовой стрелке, поршни золотника отпустятся также вниз и масло под давлениемначнет поступать из камеры e цилиндра золотникового устройства в полость m цилиндра исполнительного механизма 7. Поршнь исполнительного механизма (ИМ), связанный штоком с регулирующим органом (шибер) 6, начнет перемещаться вверх, увеличивая степень открытия шибера; это поведет к снижению давленият p. В результате снижения давления сильфон 1 разжимается, возвращая рычаг АВС в исходном положение, поршни золотника перекрывают доступ масла в цилиндр ИМ, регулирующее действие прекращается. Во время перемещения поршня ИМ вверх масло из полости n цилиндра вытесняется по трубке через камеру d цилиндра золотникового устройства и срабатывается на слив 5. Слившееся масло очищается и вновь подается в камеру e специальной насосной установкой.
Рис.1. Принципиальная схема И–регулятора косвенного действия:
Если предположить, что давление p стало ниже заданного, то дно сильфона 1 переместится вверх, рычаг АВС повернется против часовой стрелки, переместив поршни золотника вверх, и масло через полoсть e будет поступать в полость n цилиндра ИМ. Это поведет к закрытиюшибера и увеличению давления p. При этом масло из полости цилиндра ИМ через полость f цилиндра золотникового устройства поступает на слив. Заданное значение регулируемой величины устанавливается с помощью задатчика 8. Когда усилия, развиваемые сильфоном и пружиной задатчика, равны рычаг АВС находится в нейтральном положении и масло из камеры e не поступает в цилиндр ИМ. В И-регуляторах отсуствует обратная связь, они просты по устройству. Важнейшей их особенностью является то, что независимо от величины нагрузки регулируемого объекта они приводят регулируемую величину к заданному значению. И-регуляторы имеют некоторые недостатки, обусловлеными их динамическими свойствами. Малое отклонение регулируемой величины от заданного значения, И-регулятор продолжать перемещать регулирующий орган вплоть до положения полного открытия или закрытия.Перемена направления движения РО наступает лишь тогда, когда регулируемая величина проходит заданное значение. Закон регулирования предусматривает воздействие регулятора со скоростью, пропорционально отклонению регулируемой величины, и описывается уравнением.
Здесь S0 –специально рассчитываемый настроечный параметр регулятора. Знак минус означает, что при положительном отклонении регулируемой величины РО перемещается в сторону закрытия, а при отрицательном отклонении (уменшения против заданного значения) – в сторону открытия. Уравнение регулятора в интегральной форме:
Передаточная функция регулятора имеет вид
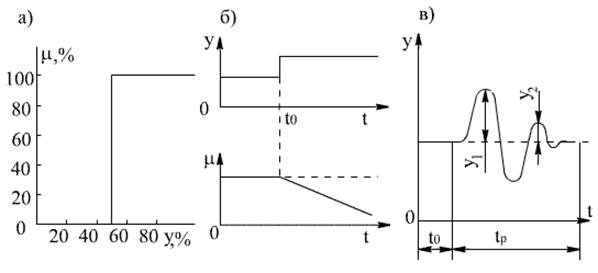
На рис.2,а показана статическая характеристика И-регулятора. Когда регулируемая величина y ниже заданного значения, регулирующий орган m находится в крайнем нижнем положения. Как только регулируемая величина достигнет заданного значения, РО начнет перемещатся в сторону открытия и может остановиться в любой точке вертикального отрезка характеристик. Начиная с момента t0, когда регулируемая величина y скачкообразно изменилась, РО перемещается с постоянной скоростью, изменяя приток (рис.2, б).
В результате действия регулятора регулируемая величина y приходит к заданному значению через некоторое время tр называемое временем регулирования; причем переходный процесс является колебательным, затухающим (рис.2, в). И–регулятор применяется только в системах самовыравниванием, в противном случае система будет неустойчивой.
Рис.3. Принципиальная схема (а) и динамическая характеристика (б) И –регулятора прямого действия:
На рис3,а показано схема И-регулятора прямого действия. На трубопроводе 1 с помощью фланцевых и болтовых соединений укреплен корпус регулятор 7. Если регулируемая величина – давления p после регулятора – будет изменяться, изменение давления через импульсную линию 8 и вентиль 9 будет передаваться на мембрану 4 ИМ, связанную с РО 6 с помощью штока 5. В точке m имеется шарнир, соединяющий шток с рычагом 3, на котором укреплен груз 2, являющийся задающим устройством. Регулируемое давлание p зависит от притока среды, т.е. от степени открытия РО 6. Когда p равно заданному значению, усилия, развиваемые мембранной 4 и грузом 2, равны, и шток 5 неподвижен. При увеличении или уменьшении давления по сравнению с задданным шток и РО 6 будет перемещатся соответственно вниз или вверх. Скорость перемешения пропорцинальна отклонению фактической величины регулируемого давлания от заданной. Как видно из графика (рис.3,б) при изменении нагрузки x объекта в момент t0 начинает изменяться регулируемая величина y и перемещаться регулирующий орган. Изменение перемещения регулирующего органа происходит в момент перемены знака регулируемой величины (точки t1,t2). Порядок работы: 1. Ознакомиться с руководством по выполнению практической работы, получить задание у преподавателя. 2. Изучить материалы методических указаний и литературы. 3. Подготовить отчет. Отчет по работе должен содержать: 1. Тему и цель работы. 2. Выполненное задание Рекомендуемая литература: Основная литература: 1. Афонин, А. М. Теоретические основы разработки и моделирования систем автоматизации: Учебное пособие для сред. проф. образования / А.М. Афонин, Ю.Н. Царегородцев, А.М. Петрова и др. - М.: Форум: ИНФРА-М, 2014. - 192 с. 2. Иванов, А.А. Автоматизация технологических процессов и производств: Учебное пособие для высш. учеб. заведений.- 2-e изд., испр. и доп. - М.: Форум: ИНФРА-М, 2015. - 224 с. Дополнительная литература: 1. Шишмарев В.Ю. Автоматика: Учебник для сред. проф. образования.- М.: Автоматика, 2005.- 288 с. Практическая работа №3
|
||
|
|
Последнее изменение этой страницы: 2016-04-23; просмотров: 582; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.169 (0.006 с.) |