Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Объяснительная ценность динамической модели действияСодержание книги
Поиск на нашем сайте
До сих пор динамическая модель действия практически не становилась предметом эмпирических исследований. Это неудивительно, если учесть многообразие вводимых ею гипотетических величин и допущений, определяющих эти величины и их взаимосвязи. Хотя эта модель и вобрала в себя множество теоретических положений и фактических данных по психологии мотивации и вводимые ею величины вполне правдоподобны, тем не менее из-за сложности постулируемых взаимосвязей они требуют разносторонней проверки. Этому мешает существующее до сих пор пренебрежение безусловно трудной операционализацией и измерением различных гипотетических параметров. Моделирование на ЭВМ гипотетических случаев в конечном счете также не может заменить эмпирической проверки, какими бы интересными ни были результаты, выдаваемые компьютером при вводе в него планомерно варьируемых исходных величин. Однако машинное моделирование может иметь определенную значимость при проверке, скажем, необходимости известных предпосылок для наступления определенных результатов. Примером этого является проверка утверждения Энтвис-ла (Entwisle, 1972) о том, что основывающиеся на ТАТ методики измерения мотива достижения не могут быть валидными, поскольку получаемые значения для рассказов по отдельным картинкам не обладают какой-либо внутренней согласованностью. Аткинсон, Бонгорт и Прайс (Atkinson, Bongort, Price, 1977) ввели в программу модели динамики действия различные значения силы мотива и степени актуализации, создаваемой последовательностями картинок ТАТ для определения времени, затрачиваемого в случае описания каждой картинки и в целом на получение продукции воображения, тематика которой относится к достижению. Полученные данные показали, что затрачиваемое в целом время (как индикатор уровня мотива) точно соответствует вводимым различиям мотивов, хотя по отношению к отдельным картинкам такой согласованности не наблюдалось. В настоящее время динамическая модель действия имеет в основном эвристическое значение, объединяя различные теоретические подходы. Примером этого может служить приравнивание мотива к «семейству» функционально эквивалентных тенденций к действию или к недействию, внутри которого могут происходить замещение и оттеснение. Такого рода представление открывает широкое поле для эмпирических исследований зоны распространения (экстенсивности) какого-либо мотива и его границ с другими мотивами. Впрочем, в этой модели в качестве определений, соотносящих друг с другом ее переменные, без проверки принимается ряд сомнительных положений наподобие представления о боязни неудачи как чисто тормозящей силе (Г). Как и все детерминистские модели, модель динамики действия не позволяет решить проблему спонтанности деятельности. Кроме того, она предполагает, что человек постоянно активно действует и никогда не бывает пассивным. Впрочем, по сравнению со стимульно-реактивными моделями типа S—O—R (Word worth, 1918) она представляет собой определенный шаг вперед, поскольку в ней хотя и не • упраздняется, но все же значительно ограничивается детерминированность действия стимулом. Согласно этой модели, в неизменной ситуации может происходить смена одного действия другим и возобновление прежнего действия. Однако односторонность динамической модели в ее нынешнем виде определяется тем, что в отличие от других современных моделей мотивации в ней нет места для когнитивных образований. Как только под влиянием стимуляции, исходящей'от сложившейся ситуации, приводятся в движение побуждающие и тормозящие силы, дальнейшие процессы развертываются вслепую и индивид лишь обнаруживает себя осуществляющим то или иное действие. Какого-либо промежуточного когнитивного контроля, релевантных Я или просто самооценочных когнитивных образований, оказывающих Мотивационной воздействие, этой моделью не предусматривается. « Аткинсон и Берч (Atkinson, Birch, 1970, p. 333-334) осознавали эту проблему. В первоначальном варианте своей модели они трактовали когнитивные образования исключительно как процессы, проходящие параллельно динамике действия. Когнитивные образования не несли никакой каузальной функции, им отводилась лишь диагностическая функция, сигнализирующая о процессах динамики действия в собственном смысле слова. Первым шагом к модификации этой позиции стало придание когнитивным образованиям определенного значения. Об этом свидетельствовало указание на то, что исходные величины модели определяются когнитивной переработкой таких особенностей наличной ситуации, как привлекательность и вероятность успеха (в соответствии с моделью выбора риска) (Atkinson, Birch, 1974). На следующей стадии (Birch, Atkinson, Bongort, 1974) эти авторы пошли еще дальше, признав самостоятельную роль когнитивных образований внутри динамики действия. Таким образом, они утверждали, что активировать побуждающие и тормозящие силы или усиливать их могут не только ключевые стимулы окружения, но и не зависящие от наличной ситуации мысли и представления. Следующий шаг должен состоять в признании когнитивной опосредованности всех тенденций к действию. Авторы не исключают такой возможности (хотя в их модели она не может найти себе должного места), однако они не видят принципов, на основе которых эта возможность могла бы быть реализована. Впрочем, в когнитивных моделях мотивации уже сформулированы принципы, позволяющие в отличие от нерефлексивной динамической модели действия связать действие человека с рефлексией; это принципы типа личностного стандарта, получения выводов на основе каузальных схем и, прежде всего, самооценки. Первую попытку объединения динамической модели с когнитивными теоретическими подходами предпринял Куль (Kuhl, 1976). В частности, согласно его варианту, позитивная самооценка в случае успеха ведет к возрастанию консуматорной силы (О и силы сопротивления (R), а соответствующие тенденции к действию (Г) и к недействию (N) в данной ситуации уменьшаются. Эмпирическая проверка модели В качестве примера проверки этой модели мы рассмотрим исследование Блэнкен-ШИТГа (Blankenship, 1982). Оно посвящено вопросу о том, как два различных действия попеременно сменяют друг друга в ситуации, когда консуматорная ценность (с) одного из этих действий является либо высокой, либо низкой. Если она высока, то это действие должно быстрее сменять альтернативную деятельность, чем в том случае, когда она низка. Действием с высокой или низкой консуматорной ценностью была деятельность достижения (компьютерная игра на точность движений), в которой на тренировочной стадии испытуемые достигали либо 70%-го, либо 30%-го уровня успеха. Согласно рассматриваемой модели, при более высоком уровне успешности консумматорная ценность с также должна быть более высокой, что должно побуждать испытуемого перейти к альтернативной деятельности через более короткое время. Альтернативная деятельность состояла в оценке коротких шуток по степени их остроумности. В основном опыте испытуемые начинали с выполнения этого альтернативного задания и могли в любой момент вернуться к достиженческому заданию, с которым они уже ознакомились в тренировочном опыте в его легком или сложном варианте.
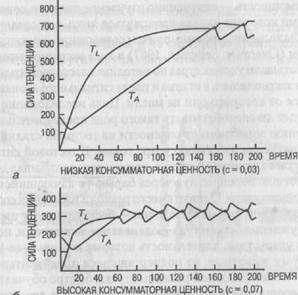
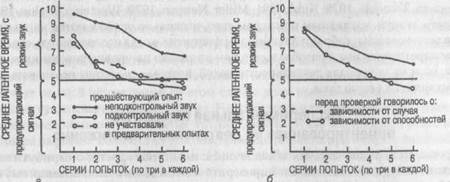
Рис, 15.6. Моделирование на компьютере начальной длительности работы над достиженческим заданием (Ц как функция низкой а) и высокой 6) вероятности успеха. TL- тенденция к продолжению работы над достиженческим заданием; ТА ~ тенденция к возвращению к альтернативному заданию; с - консуматорная ценность способности к достижению, на которую умножается тенденция к действию Г для получения консуматорной силы (по: Blankenship, 1982, S. 911) На рис. 15.6 показано, каких результатов следует ожидать, исходя из моделирования этой ситуации на компьютере. Смена исходной альтернативной деятельности (шутки) достиженческим заданием должна в обеих ситуациях происходить через один и тот же промежуток времени, так как побудительная сила первоначально должна быть одинаковой, поскольку обе субъективные вероятности успеха (0,30 и 0,70) отстоят одинаково далеко от максимальной (по модели выбора риска) мотивирующей ценности (0,50). Разумеется, это относится лишь к ориентированным на успех индивидам, в силу чего в опыте принимали участие лишь ориентированные на успех испытуемые (nAch > TAQ). Затем по мере осуществления деятельности должен проявиться предсказанный эффект различий в консуматорной ценности. Так и произошло в действительности. Группа, получившая легкое задание на ловкость, посвятила ему меньше времени и быстрее перешла к альтернативной деятельности, чем группа, получившая трудное задание на ловкость. Это различие, по-видимому, нельзя объяснить исходно более сильной побудительной тенденцией трудного задания на ловкость, поскольку латентное время перехода к этому заданию было одинаковым при обеих степенях сложности. Q других попытках проверить эту модель рассказывается в работе Куля и Блэнкеншипа (КиЫ, Blankenship, 1979a, b). Выученная беспомощность Выученная беспомощность — интенсивно изучаемое явление, совокупность условий возникновения которого начала проясняться лишь в последнее время. Впервые.это явление было зафиксировано, причем совершенно неожиданно, Овермайе-ром и Селигманом (Overmier, Seligman, 1967) в ходе экспериментов с животными. Эти авторы вырабатывали у собак страх по методике классического обусловливания: животные жестко закреплялись в станке и после сигнального звонка получали удар током, уклониться от которого они не могли. Цель исследования заключалась в проверке того, будет ли способствовать такого рода предварительный опыт более быстрому уклонению животного от опасности на тестовой стадии эксперимента, предполагавшей научение избеганию удара током. В тестовой ситуации включению тока предшествовал световой сигнал, причем свет вспыхивал достаточно рано с тем, чтобы животное, перепрыгнув через барьер (в качающийся ящик), могло избежать болезненного удара. Однако вместо реакции избегания собаки научались прямо противоположной форме поведения — беспомощному ожиданию удара, Вначале они возбужденно бегали туда-сюда, а затем ложились и, поскуливая, терпеливо выносили удары тока, длительность которых доходила до 1 мин. В противоположность этому животные, не подвергавшиеся предварительно процедуре выработки классической условной реакции страха, быстро обучались уклоняться от удара током, перепрыгивая через барьер. Аналогичные явления наблюдались у кошек, крыс и рыб (см.: Maier, Seligman, 1976; Seligman, 1975). С начала 1970-х гг. исследователи с переменным успехом пытались сформировать и продемонстрировать выученную беспомощность у человека (см. обзор: Miller, Norman, 1979). Там, где это удавалось, ее эффект оказывался очень небольшим по сравнению с проявлениями этого феномена в экспериментах с животными. Рассмотрим в качестве примера исследование Хирото (Hiroto, 1974), строившего свой опыт по образцу экспериментов с животными на обучение поведению избегания. Результаты Хирото дают представление о типичном влиянии наступ- ления неприятных субъекту событий, неподконтрольных его воле, на снижение эффективности его действий в аналогичных ситуациях. Неприятное событие заключалось в этом эксперименте не в ударе током, а в чрезмерно громком, визжащем звуке. Испытуемые были разделены на три группы. Члены одной из них могли на первом этапе опыта отключать звуковой сигнал, нажав на специальный рычаг. Неприятное событие было в этом случае хотя и неизбежным, но подконтрольным субъекту (иными словами, после того, как оно наступало, его можно было прекратить). Для испытуемых второй группы событие было и неизбежным, и неподконтрольным: независимо от нажатия на рычаг звук включался на определенное время. Третья (контрольная) группа не принимала участия в первой фазе опытов. На втором этапе — при проверке формирования выученной беспомощности — испытуемые всех групп могли, попеременно повернув направо или налево рычаг уже на другом аппарате (ящик с рычагами), выключить длящийся 5 с электрозвонок, перед включением которого тоже на 5 с загорался свет. Если испытуемый поворачивал рычаг в момент, когда свет еще горел, звук можно было отключить. Результаты вполне соответствовали данным экспериментов с животными. Испытуемые, которые на стадии обучения вынуждены были терпеть неподконтрольный им звук, оказались более беспомощными, чем те, кто имел дело с контролируемым звуком или же не сталкивался с ним вообще. Как видно из приведенного на рис. 15.7, а графика динамики латентного времени, эти испытуемые научались выключать звук лишь с запозданием и не смогли (за время, которое потребовалось испытуемым двух других групп) научиться совсем его избегать, используя предвосхищающий сигнал.
Рис. 15.7. Зависимость среднего латентного времени избегания или выключения резкого звука, появление которого за 5 с предваряет световой сигнал, от а) предшествующего опыта испытуемых и от 6} дававшейся перед тестовым опытом инструкции. Приведены данные по 6 последовательным сериям, каждая из которых состояла из трех попыток (Hiroto, 1974, р. 190-191) Помимо влияния предшествующего неприятного и неподконтрольного опыта Хирото удалось выделить еще два фактора, способствующие возникновению беспомощности. Первым было введение перед тестовым опытом дополнительной инструкции, указывающей на зависимость контроля над звуком либо от случая, лиоо от способностей испытуемых. При навязывании экспериментатором атрибуции первого типа латентное время выключения звука оказывалось большим, чем при атрибуции второго типа (см. рис. 15.7, б). Вторым значимым фактором явились индивидуальные различия по роттеровской шкале внутреннего—внешнего локуса контроля: испытуемые с внешним локусом контроля обучались медленнее. Все три фактора — неподконтролыюсть звука в предварительном опыте, предполагаемая зависимость его выключения от случая и внешний локус контроля как личностная характеристика — аддитивным образом влияли на замедление научения устранению и избеганию звука. Действие этих трех факторов было столь сходным, что складывается впечатление, что все они суть формы проявления одного и того же базового процесса формирования беспомощности. Эти и аналогичные результаты были сведены Селигманом и его коллегами к единому теоретическому «знаменателю»: опыт субъекта, если он состоит в том, что его действия никак не влияют на ход событий и не приводят к желательным результатам, усиливает ожидание неподконтрольное^ субъекту результатов его действия (исходов), вследствие чего возникает тройственный — мотивационный, когнитивный и эмоциональный — дефицит. Мотивационный дефицит проявляется в торможении попыток активного вмешательства в ситуацию. Когнитивный — в трудности последующего научения тому, что в аналогичных ситуациях (на самом деле подконтрольных субъекту) действие может оказаться вполне эффективным. Эмоциональный же дефицит проявляется в возникающем из-за бесплодности собственных действий подавленном (или даже депрессивном) состоянии. Однако проведенные исследования с людьми вскоре показали недостаточность этих положений. Последовавшая за тем разработка теории, значительно расширившейся благодаря включению в рассмотрение атрибутивных процессов (Abramson, Seligman, Teasdale, 1978; Kuhl, 1981; Miller, Norman, 1979; Wortman, Brehm, 1975), может служить наглядным примером того, насколько усложняются наши представления о каком-либо мотивационном феномене, когда исследователь стремится воспроизвести его и разобраться в нем не только на уровне поведения животных, но и на материале деятельности людей, которые способны осознавать свои действия и их результаты.
|
||||
|
|
Последнее изменение этой страницы: 2016-04-18; просмотров: 237; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.219.255.63 (0.013 с.) |