
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Общие принципы построения интеллектуальных систем управления на основе нечеткой логики.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте Применение нечеткой логики обеспечивает принципиально новый подход к проектированию систем управления, “дорыв'' в новые информационные технологии, гарантирует возможность решения широкого круга проблем, в которых данные, цели и ограничения даются слишком сложными или плохо определенными и в силу этого не поддаются точному математическому описанию. Возможны различные ситуации, в которых могут использоваться нечеткие модели динамических систем: - когда имеется некоторое лингвистическое описание, которое отражает качественное понимание (представление) процесса и позволяет непосредственно построить множество нечетких логических правил; - имеются известные уравнения, которые (хотя бы грубо) описывают поведение управляемого процесса, но параметры этих уравнений не могут быть точно идентифицированы; - известные уравнения, описывающие процесс, являются слишком сложными, но они могут быть интерпретированы нечетким образом для построения лингвистической модели; - с помощью входных/выходных данных оцениваются нечеткие логические правила поведения системы. Первые результаты практического применения алгоритмов нечеткой к у правлению реальными техническими объектами были опубликованы в 1974 г. в работах профессора Лондонского Королевского колледжа Э.Х.Мамдани, посвященных проблеме регулирования парогенератора для электростанции. В этих работах была предложена сегодня классической структурная схема системы нечеткого управления в соответствии с рисунком 3.1. Под нечетким управлением (Fuzzy Control) в данном случае понимается стратегия управления, основанная на эмпирически приобретённых знаниях относительно функционирования объекта (процесса), представленных в лингвистической форме в виде некоторой совокупности правил.
Рисунок 3.1 - Структурная схема системы нечеткого управления На рисунке 3.1 ДФ - динамический фильтр, выделяющий, помимо сигналов ошибок управления x1=r1-y1 и x3=r2-y2,производные от этих сигналов x2=x1 и x4=x3;
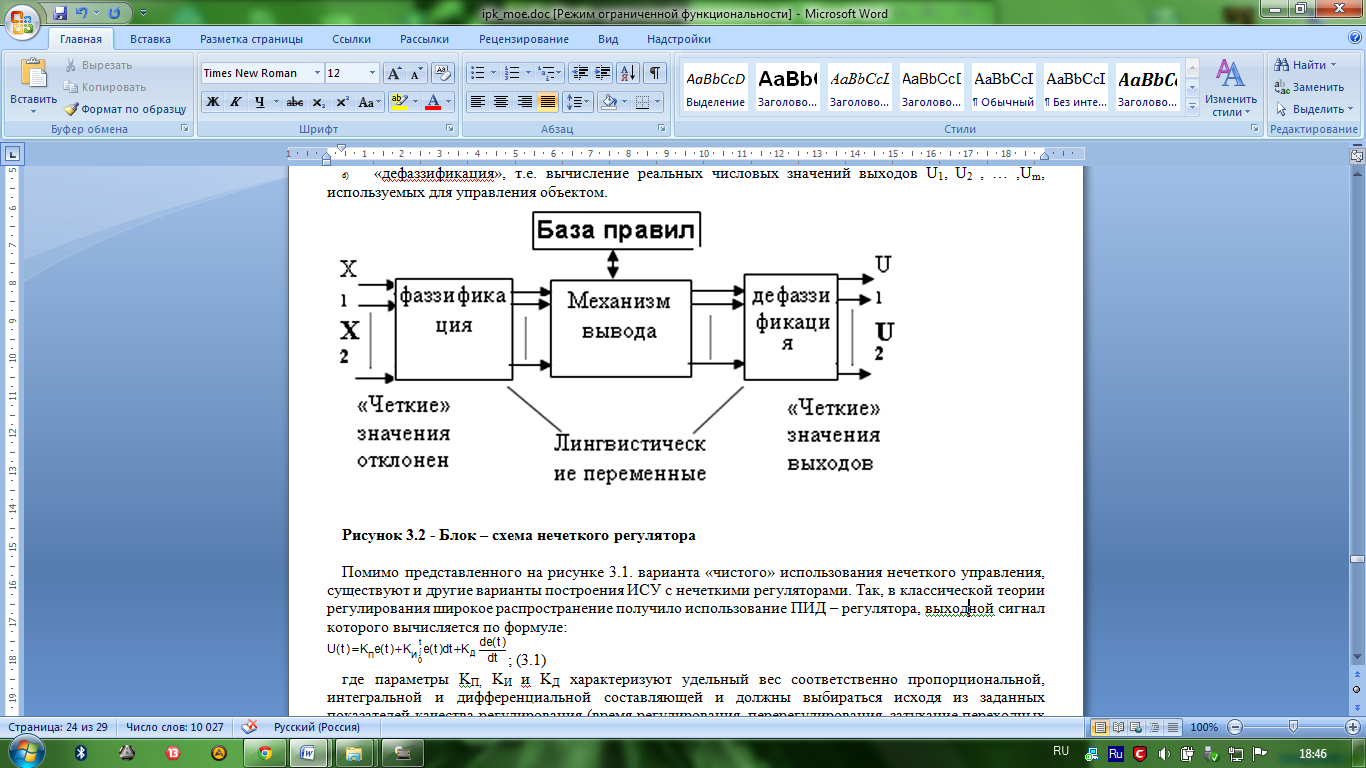
РНЛ- регулятор на основе нечеткой логики (“нечеткий регулятор”)включающий в себя базу знаний (конкретнее – базу правил) и механизм логического вывода; r=(r1,r2)Т,x=(x1,x2,x3,x4)Т, u=(u1,u2)Т и y=(y1,y2)Т - соответственно векторы задающих воздействий (уставок),входов и выходов РНЛ, а также выходов объекта управления; т-операция транспонирования вектора. В качестве входов и выходов РНЛ выступают: x1=Pe-отклонение давления в паровом котле (y1) по отношению к его требуемому значению (r1); x2=Cpe-скорость изменения Pe; x3=Se-отклонение скорости изменения давления (y2) по отношению к его заданному значению (r2); x4=Cse - скорость изменения Se; u1=Hc-изменение степени подогрева пара; u2=Tc- изменение положения дросселя. Мамдани предложил рассматривать эти величины как лингвистические переменные, каждая из которых может принимать одно из следующих значений из множества L={NB, NM, NS, NO, PO, PS, PM, PB}. Здесь 1-я буква в обозначении указывает знак числовой переменной и соответствует английскому слову Negative (“отрицательное”) или Positive (“положительное”), 2-я буква говорит об абсолютном значении переменной: Big, Middle, Small или O (“близкое к нулю”).На пример, символ Ns означает ”отрицательное малое”. Блок – схема нечеткого регулятора в общем случае принимает вид, изображенный на рисунок 3.2. Как видно из данной схемы, формирование управляющих воздействий U1, U2 , …,Um включает в себя следующие этапы: a) Получение отклонений управляемых координат и скоростей их изменения - X1, X2 , …,Xn; b) «Фаззификация» этих данных, т.е. преобразование полученных значений к нечеткому виду, в форме лингвистических переменных; c) определение нечетких (качественных) значений выходных переменных U1, U2 , …,Um (в виде функций их принадлежности их соответствующим нечетким подмножествам) на основе заранее сформулированных правил логического вывода, записанных в базе правил; d) «дефаззификация», т.е. вычисление реальных числовых значений выходов U1, U2 , …,Um, используемых для управления объектом.
Рисунок 3.2 - Блок – схема нечеткого регулятора Помимо представленного на рисунке 3.1. варианта «чистого» использования нечеткого управления, существуют и другие варианты построения ИСУ с нечеткими регуляторами. Так, в классической теории регулирования широкое распространение получило использование ПИД – регулятора, выходной сигнал которого вычисляется по формуле:
где параметры KП, KИ и KД характеризуют удельный вес соответственно пропорциональной, интегральной и дифференциальной составляющей и должны выбираться исходя из заданных показателей качества регулирования (время регулирования, перерегулирования, затухание переходных процессов). Возможное использование нечеткого регулятора для автоматической настройки (адаптации) указанных параметров ПИД – регулятора показано на рисунке3.3.
Рисунок 3.3 - Структура ИСУ с нечетким регулятором
|
||
|
|
Последнее изменение этой страницы: 2016-09-20; просмотров: 975; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.5 (0.012 с.) |



 ; (3.1)
; (3.1)



