Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Измерительные схемы aстатического уравновешивания.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Виды интерфейсов применяемых в авиационных приборах и ИВК. Опишите предложенную структуру передачи информации. Стандарт MIL STD-1553B Для локального многоточечного соединения распределенных подсистем специального назначения широко применяются стандартизированные интерфейсы последовательных мультиплексных (магистральных) каналов (МК) типа MIL-1553В, MIL-1773. Интерфейсы обеспечивают расширенные режимы адресации, включая широковещательный режим, защиту от помех и идентификацию ошибок передачи. В состав МК входят контроллер (К), оконечные устройства (OУ) в количестве до 32, линии передачи информации. Контроллер, обычно входящий в состав ЭВМ, управляет обменом информацией, осуществляет сопряжение с линией передачи и контроль передачи информации, состояния ОУ и самоконтроль. Оконечное устройство принимает и выполняет адресованные ему команды контроллера, осуществляет сопряжение подключенного оборудования с линией передачи информации, контролирует передачу информации, производит самоконтроль и передает результаты контроля в контроллер. Обмен информацией осуществляется по принципу команда-отчет с временным разделением сообщений. Информация передается в МК в виде сообщений, состоящих из командных (КС), информационных (ИС) и ответных слов (ОС). В МК предусмотрены три вида передач сообщений: от К к ОУ; от ОУ к К; от ОУ к ОУ. Порядок следования сообщений произвольный.
Стандарт ARINС – 429 Каналы ПК по АRINC-429 используются для передачи цифровых данных между элементами систем авиационной электроники. На бортах летательных аппаратов, гражданских и военных, до 75% цифрового межсистемного обмена приходится на каналы интерфейса ARINC-429, таким образом, этот интерфейс является основным «интеллектуальным» связующим звеном в системах авиаэлектроники. С введением новых систем и аппаратов функции каналов ARINC-429 частично передаются на мультиплексные каналы на основе стандарта МIL-STD-1553B (ГОСТ 26765.52-87), но и на долю каналов ARINC-429 работы хватит еще на добрый десяток лет. Стандарт АRINC-429 и его отечественные аналоги ГОСТ18977-79 и РТМ 1495-75 описывают вид, параметры сигналов, структуру кодов и протоколы сообщений. В основу интерфейса заложен вид биполярного двухфазного сигнала (в специальной литературе описывается как RZ-код), передаваемого по бифилярной экранированной линии связи. Передача осуществляется на стандартизованных частотах (период-Т), 32-х разрядными словами ПК, включающими адресную и информационную части, и 32-й разряд - бит контроля по четности (Sum). Слова разделяются обязательной «паузой» - отсутствием сигнала в линии в течение 4-40Т, которая определяет окончание слова ПК (см. рис. 1).
Рис.1. Вид сигналов и структура слова последовательного кода по ARING – 429
Биполярный сигнал RZ (рис. 1 ) обладает лучшими, по сравнению с униполярным RZ-кодом, энергетическими характеристиками. Единица представлена положительным уровнем напряжения, нуль—отрицательным. Средняя мощность равна A2/4R, т. е. половине средней мощности униполярного сигнала, хотя перепад уровней тот же самый. Код имеет два недостатка: Ретрансляторы и приемники способны надежно восстановить синхронизирующую временную сетку только тогда, когда паузы между импульсами не слишком велики. Появление очередного импульса после незначительной паузы позволяет каждый раз корректировать «ход часов» ретранслятора или приемника. С увеличением паузы надежность «службы времени» этих устройств падает. Например, после передачи серии из 10 тыс. нулей приемник не сможет точно определить, находится ли последующая единица на позиции 9999, 10000 или 10001. Другими словами, при передаче достаточно большой последовательности нулей приемник (или ретранслятор) теряет синхронизацию с передатчиком (или ретранслятором). Отсутствие возможности оперативной регистрации ошибок, таких, как пропадание пли появление лишних импульсов из-за помех. Эти недостатки ликвидируются введением избыточности, а именно скорость передачи сигналов по линии выбирается равной скорости передачи информации, однако вводятся дополнительные электрические уровни. В данном случае – «нулевого» уровня. А также использованием двух фаз. Интерфейс ARINC-429 называется радиальным, т.к. в интерфейсе обычно к одному каналу подключен только один передатчик, а каждая принимающая система должна иметь свою радиальную физическую линию связи с этим передатчиком (соединение типа звезда). Наличие в структуре кода 8-разрядной адресной части позволяет передавать в канале до 256 различных параметров. Адрес параметра, структура информационной части кода и протокол строго определяются стандартом.
Канал измерения расхода Приборы и датчики, измеряющие расход топлива в единицу времени (расходомеры), применяются для выдерживания наиболее экономичного режима полета, отвечающего минимуму расхода горючего на километр пройденного пути (с учетом скорости полета). Эта же задача может решаться автоматически с помощью экстремального регулятора, воспринимающими устройствами которого служат датчик расхода топлива и датчик скорости полета.Зная запас топлива и его расход, можно вычислить возможную длительность и дальность полета, а также с учетом скорости полета и дальность. Тахометрические расходомеры Принцип действия тахометрических (скоростных или турбинных) расходомеров основан на зависимости скорости вращения расположенной в трубопроводе ненагруженной тангенциальной крыльчатки (турбины) от расхода жидкости. Достоинством метода является пропорциональная зависимость скорости вращения крыльчатки от расхода жидкости. Частота вращения крыльчатки зависит не только от величины расхода, но также от вязкости жидкости (температуры), что вызывает появление погрешностей прибора. В приборах мгновенного расхода сигнал тахогенератора (напряжение или частота) служит мерой измеряемого расхода. Математическая модель Частота вращения ненагруженной крыльчатки пропорциональна скорости потока, т. е.
где к – коэффициент, зависящий от параметров крыльчатки; ν – скорость потока, км/ч. Мгновенный объемный расход может быть выражен формулой
а мгновенный массовый расход
где ρ – плотность жидкости, гр/см3; S – сечение трубопровода, м2; Если воспользоваться формулами (2) и (4) получим
Курсовые системы типа КС Курсовые системы типа КС предназначены для определения и указания курса ЛА и углов его разворота, а также для указания пеленгов и курсовых углов радиостанции. Курсовые системы типа КС имеют три режима работы: гирополукомпаса (ГПК), магнитной коррекции (МК) и астрокоррекции (АК). Режим ГПК является основным режимом, Благодаря стабилизации гироузлов по крену в курсовых системах КС исключена карданная погрешность при кренах ЛА. В режиме ГПК система одновременно выдает гироскопический (ортодромический), магнитный и истинный курсы. Курсовые системы типа КСИ Курсовые системы типа КСИ предназначены для определения магнитного или гироскопического курса при любых углах крена и тангажа ЛА и определения курсовых углов и пеленгов радиостанций. Курс ЛА определяется с помощью датчика с индукционным чувствительным элементом. Благодаря стабилизации гироузлагироагрегата по крену и тангажу по сигналам гировертикали в курсовых системах типа КСИ исключена карданная погрешность. Основным режимом работы КСИ является режим гирополукомпаса. Режим МК (при нажатой кнопке согласования) используется для начальной выставки системы по магнитному меридиану. Курсовые системы типа ТКС-П Точная курсовая система ТКС-П предназначена для определения курса самолета, а также угла сноса, пеленга радиостанции и путевых углов самолета при работе соответственно с измерителем угла сноса и путевой скорости, автоматическим радиокомпасом (АРК) и навигационным вычислителем.
Курсовые системы типа ТКС-Ппо принципу действия аналогичны курсовым системам КС и от курсовых систем этого типа отличаются выгодно тем, что имеют в 2-3 раза меньше величины ухода гироскопов в азимуте (0,5- град/ч, в то время как у курсовых систем типа КС допускается 2 град/ч) [8]. Основные отличия курсовых систем типа ТКС-П и КС: а) в системах типа ТКС-П переключение потребителей с одного гироагрегата на другой выполняется отдельно от переключения канала коррекции, в системах типа КС — одновременно; б) независимо от положения переключателей при работе системы типа ТКС-П. в режиме ГПК оба гироскопа работают в режиме ГПК, а в системах типа КС гироскопы работают один в режиме ГПК, другой — в режиме МК. На рисунке изображена структурная схема курсовой системы, в которой на единый указатель работает магнитный датчик (МД), астрономический датчик (АД), гирополукомпаса ГА и радиокомпас АРК. Для уменьшения карданных ошибок наружная рамка гирополукомпаса стабилизируется от гировертикали (ГВ), коррекция которой отключается при длительно действующих горизонтальных, ускорениях с помощью выключателя коррекции (ВК). Для компенсации «уходов» в азимуте из-за вращения Земли гирополукомпас корректируется сигналами, пропорциональными вертикальной составляющей скорости вращения Земли. Комплексная (единая) курсовая система является также датчиком курсовых сигналов для различных ее потребителей на летательном аппарате (навигационный координатор, автопилот).
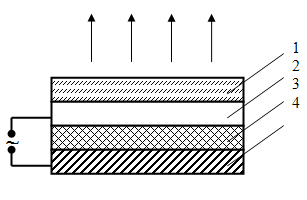
Электролюминесцентные УОИ В основу электролюминесценции положено свойство некоторых кристаллических веществ—люминофоров—излучать свет под действием электрического поля. Электролюминесцентное свечение свойственно некоторым кристаллическим веществам, у которых под действием поля атомы переходят в возбужденное состояние. Широко применяют порошковые люминофоры на основе сульфидов цинка—кристаллофосфоры. Они являются полупроводниками с примесной проводимостью. Атомы примесей могут входить в кристаллическую решетку путем внедрения или замещения. В основу электролюминесцентных индикаторов (ЭЛИ) положен плоский конденсатор, диэлектриком которого служит связующее вещество — композиция органической смолы и люминофора, как на рис. 1. Один из электродов 2 конденсатора прозрачный, другой— металлический 4. В качестве прозрачного электрода, используют окись кадмия или двуокись олова. Металлический электрод имеет форму знака, который должен, отображаться УОИ. Под воздействием поля, создаваемого источником переменного напряжения возникает свечение участков люминофора 3, контактирующих с металлическим электродом. Стекло 1 выполняет защитную роль ЭЛИ.
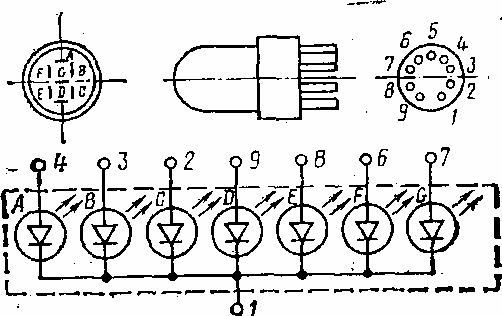
Рис. 1. Устройство электролюминесцентного индикатора: 1-стекло; 2-прозрачный электрод; 3-люминофор; 4- металлический электрод. Спектр света, испускаемого электролюминесцентными источниками, лежит в видимой части излучения и зависит от вида применяемого активатора: добавка меди вызывает голубое свечение, меди и алюминия - зеленое и т. д. С увеличением величины возбуждающего напряжения и частоты спектральный состав ЭЛИ смещается в более высокую область. Наибольшая яркость у ЭЛИ с зеленым свечением. Светодиодные УОИ Индикаторы, построенные на светодиодах, компактны, имеют большой угол обзора и совместимы с интегральными схемами. Для дешифрации четырехразрядного двоичного кода и управления таким индикатором достаточно двенадцать корпусов интегральных схем серии 155 и семь германиевых диодов. Для управления индикаторами на светодиодах, порошковыми ЭЛИ и другими используют оптроны—приборы, состоящие из источника и приемника излучения, оптически связанных между собой и находящихся в одном корпусе. В оптроне происходит преобразование «электрический — световой — электрический» сигналы. Семисегментныйцифросинтезирующий индикатор типа КЛ-104 А представлен на рис. 5. Диоды-сегменты имеют общий катод1, соединенный с внешним выводом. Диоды находятся в вакууме. Баллон имеет линзу, обеспечивающую увеличение изображения. Мощность, потребляемая одним сегментом, около 0,03 Вт. Световые характеристики таких индикаторов довольно стабильны во времени. Срок службы составляет около 105 ч, причем за это время яркость уменьшается на 50%. Яркость изображения можно регулировать, изменяя величину напряжения питания. В качестве источника излучения применяют светодиоды, а функции приемника выполняют фоторезисторы и фоточувствительные приборы с р-п-переходом.
Рис. 5. Внешний вид и схема индикатора КЛ-104А Индикаторы на светодиодах изготовляются двух типов: сегментные (цифровые) и матричные (универсальные). Семисегментный индикатор позволяет воспроизводить все десять цифр (и точку) и некоторые буквы.
Матричный индикатор содержит 7^5 светодиодов (светящихся точек) и позволяет воспроизводить все цифры, буквы и знаки стандартного кода для обмена информацией. Принцип работы Сигнал с термопары сравнивается с сигналом задатчика построенного на делителе сопротивлении R1, R2, R2’, R2” систочником эталонного напряжения - стабилитроном. Погрешность всего регулятора во многом определяется погрешностью задатчика, поэтому он строится из самых стабильных элементов. Резисторы R1 и R2 также должны обладать малым температурным уходом. Полученный сигнал разности усиливается МДМ усилителем, обладающим малым дрейфом нулевого уровня. Усиленный сигнал поступает на нелинейное корректирующее звено, имеющее при DТт*£[DТто*] передаточную функции W1(s) = k, и при DТт*>[DТто*] передаточную функциюW2(s) = k(Ts+1)/(ts+1). Значение порога переключения [DТто*] выбирается экспериментально и составляет 15...25° С. Величина постоянной времени Т равна постоянной времени термопары (в случае ее рассмотрения в виде одноемкостного звена): t» 0,1Т. Необходимость применения нелинейного корректирующего контура вызвана тем, что при больших забросах температуры необходимо скомпенсировать инерционность термопары и обеспечит быстрый слив топлива, а на режимах стабилизации отключение производной позволяет обеспечить устойчивость и помехозащищенность канала регулирования температуры газа. Нелинейная характеристика получается за счет использования диода VD, рабочая характеристика которого смещена счет напряжения Е2, обеспечивая формирование порога [DТто*].
Сформированный сигнал с помощью модулятора преобразуется в широтно-импульсные посылки, коэффициент заполнения которых пропорционален управляющему напряжению. Работа исполнительного механизма в широтно-импульсном режиме позволяет исключить вредное влияние «плавания» нулевого положения штока исполнительного механизма на работу системы, а также произвести линеаризацию характеристик узлов «сопло – заслонка» и «сервомотор». При достаточно большой частоте квантования передаточную функцию ШИМ –II аппроксимируют безинерционным звеном. Сигнал с ШИМ поступает на усилитель мощности, в нагрузку которого включены обмотки исполнительного механизма. От схемы усилителя мощности во многом зависят динамические характеристики исполнительной части. Как правило, усилитель мощности запитывается от источника тока со схемой форсирования, что позволяет увеличить крутизну нарастания ток в обмотках исполнительного механизма и расширить его полосу пропускания. Шток исполнительного механизма совместно с соплом, установленным на гидравлическом агрегате, образуют управляющий элемент исполнительного сервомотора
Двоичный код Двоичный код является важнейшим кодом в цифровых системах, поскольку он является универсальным. Благодаря ограничению, в соответствии с которым применяются только символы 1 и 0, становится возможной обработка сигналов с помощью схемных элементов, работающих как переключатели. Двоичный код позволяет также пользоваться арифметикой, аналогичной арифметике десятичных систем. Двоичную систему счисления можно рассматривать как кодирование десятичной системы. Двоичное число состоит из слова, которое образовано символом Ci ZB=cn-1cn-2···c1c0,c-1c-2···c-m+2c-m+1c-m (2.1)
Двоичное число имеет n разрядов перед запятой и m разрядов после запятой. Отдельным битам присвоены, в соответствии с их позицией i в слове, весовые коэффициенты 21. На основе этого можно рассчитать эквивалентное десятичное число z10: zD=g(zB)=cn-12n-1+ cn-22n-2+ … + c121+ c222+ c-12-1+ … + c-m2-m (2.2)
Двоичный (или дуальный) код обозначается как взвешенный код, поскольку стоящие дальше влево биты обладают более высокими весовыми коэффициентами. Уравнение (2.2) можно рассматривать, как правило, в соответствии с которым производится преобразование двоичных чисел в десятичные числа.
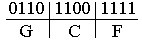
Шестнадцатеричный код На практике наряду c двоичным кодом внедрился шестнадцатеричный код, поскольку он обеспечивает лучшее обозрение длинных двоичных чисел. Шестнадцать шестнадцатеричных цифр определены в табл. 2.4. Шестнадцатеричные цифры больше девяти представлены буквами A-F. Для преобразования двоичных в шестнадцатеричные числа объединяют по четыре цифры двоичного числа, которые интерпретируются как шестнадцатеричный разряд. Благодаря этому шестнадцатеричное число занимает только четверть разрядов, занимаемых двоичным числом одинаковой величины. Например:
Итак, справедливо выражение 01100110011112 = GCF16. Таблица 2.4. Шестнадцатеричные числа.
В качестве обозначения шестнадцатеричного числа используется индекс Н. Преобразование шестнадцатеричного числа в десятичное число и обратно проще всего производить через соответствующее двоичное число. Также возможно производить преобразование с помощью алгоритма, как при преобразовании двоичного числа в десятичное число. Обратное преобразование производится аналогично представленному уравнением (2.2).
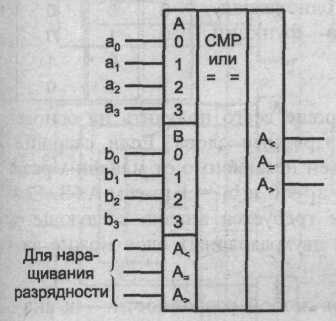
Цифровые компараторы. Компараторы (устройства сравнения) определяют отношения между двумя словами. Основными отношениями, через которые можно выразить остальные, можно считать два — "равно" и "больше". Функции, вырабатываемые компараторами: они принимают единичное значение (истинны), если соблюдается условие, указанное в индексе обозначения функции. Например, функция Fa - в = 1, если А = В и принимает нулевое значение при А ≠В. Приняв в качестве основных отношения "равно" и "больше", для остальных можно записать: fa≠b= fa = b; fa<b = fb>a; fa;>b=fb>a; fa≤b=fa>b Эти отношения используются как логические условия в микропрограммах, в устройствах контроля и диагностики ЭВМ и т. д. В сериях цифровых элементов обычно имеются компараторы с тремя выходами: "равно", "больше" и "меньше" (рис.34.1). Для краткости записей в индексе выходных функций указывается только слово А.
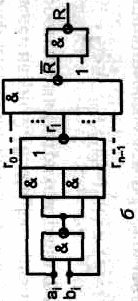
Рис.34.1. Условное обозначение компаратора с тремя выходами Устройства сравнения на равенство строятся на основе поразрядных операций над одноименными разрядами обоих слов. Слова равны, если равны все одноименные их разряды, т. е. если в обоих нули или единицы. Признак равенства разрядов: ri = aibi \/ aibi = aibi \/ aibi = aibi aibi = ai + bi. Признак неравенства разрядов: ri = aibi \/ aibi = aibi \/ aibi = aibi aibi = ai + bi Признак равенства слов: R = rn-1 rn-2...r0. Схема компаратора на равенство в базисе И-НЕ показана на рис.34.2, а.
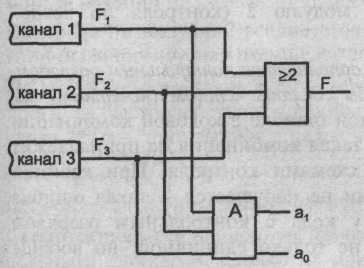
Рис.34.2. Схемы компараторов на равенство (а, б) Схема без парафазных входов (рис.34.2, б) основана на выражениях для гi, преобразованных следующим образом: ri = aibi \/ aibi = ai(ai \/ bi) \/ bi (ai \/ bi) = aiaibi \/ biaibi Цифровые компараторы применяются для выявления нужного числа (слова) в цифровых последовательностях, для отметки времени в часовых приборах, для выполнения условных переходов в вычислительных устройствах, а также в адресных селекторах. Схемы контроля ЦУ. В некоторых случаях контроль жизненно важен (авиационные приборы, управление мощными энергетическими установками, мониторинг пациентов в клиниках и др.). Причинами нарушения нормальной работы ЦУ могут быть отказы (т. е. нарушения из-за возникших неисправностей, имеющих постоянный характер) и сбои (т. е. нарушения из-за проявлений неблагоприятных факторов, в частности, помех, которые в дальнейшем могут и не проявиться). Цели и задачи контроля, диагностики и исправления ошибок в ЦУ могут быть разными. Задачи выявления ошибок решаются разными методами. Можно, например, воспользоваться дублированием ЦУ и сравнением результатов работы двух идентичных устройств. Несовпадение результатов в этом случае рассматривается как признак ошибки (хотя вероятность того, что ошибка появилась в контролируемом устройстве, а не в контролирующем равна всего 50%). Для выявления ошибок используются специальные коды, более сложные, чем двоичные. Можно ставить задачи маскирования (исправления) ошибок. В этом случае наличие ошибок определенного типа и количества не нарушает работу устройства, поскольку их влияние устраняется автоматически. В этой области используется, например, троекратное резервирование устройств с выработкой результата путем "голосования" с помощью мажоритарных элементов. Эти элементы вырабатывают выходные данные "по большинству" входных. Если из трех устройств одно стало работать неправильно, это не скажется на результате. Только ошибка в двух из трех каналов проявляется в результате. Отметим, что добавление к функциям устройств функций контроля всегда связано с избыточностью — платой за новые возможности будут дополнительные аппаратные или временные затраты. Вводимая избыточность — это цена контроля. В частности, метод дублирования ценен своей универсальностью, но дорог, для него избыточность составляет около 100%. К таким схемам контроля ЦУ относятся мажоритарные элементы, схемы контроля по модулю 2 и схемы кодирования-декодирования для кодов Хемминга. Мажоритарные элементы. Задача мажоритарного элемента — произвести "голосование" и передать на выход величину, соответствующую большинству из входных. Ясно, что мажоритарный элемент может иметь только нечетное число входов. Практически выпускаемые элементы имеют по три входа или по пять входов. Функционирование мажоритарного элемента, на входы которого поступают величины F1, F2, и F3 и по результатам голосования вырабатывается выходная величина F, представлено в табл.34.1. Если имеется в виду контроль многоразрядных слов, то в каждом разряде ставится элемент рассматриваемого типа. Кроме выхода F, в таблице даны и выходы а1, а0 — старший и младший разряды двухразрядного кода, указывающего номер отказавшего канала (рис.34.3).
Рис.34.3. Схема голосования с мажоритарным элементом. Из таблицы легко получить функции, которые после несложных преобразований приводятся к следующим: F = F1F2\/F1F3\/ F2F3, al = F2 + F3, а0 = F1 + F3. В схемах типа рис.34.3 от мажоритарного элемента требуется особенно высокая надежность, т. к. его отказ делает бесполезной всю схему резервирования.
Регистровые файлы Из статических регистров составляются блоки регистровой памяти — регистровые файлы. В микросхеме типа ИР26 (серии КР1533, К555 и др.) можно хранить 4 четырехразрядных слова с возможностью независимой и одновременной записи одного слова и чтения другого. Информационные входы регистров соединены параллельно. Входы адресов записи WA и WB (от Write) дают четыре комбинации, каждая из которых разрешает "защелкнуть" данные, присутствующие в настоящее время на выводах D1_4. Содержимое файла (регистра) вызывается на выходы блока Q1-4 с помощью дешифратора считывания (адресных входов мультиплексора) адресами RA и RB (от английского Read). Таких адресов четыре. Если на входе разрешения записи WE (Write Enable) действует активный низкий уровень, то данные поступают в соответствующий регистр, при высоком уровне WE входы для данных и адресов запрещены. Выходные данные выдаются в прямом коде.
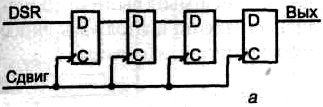
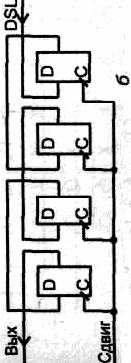
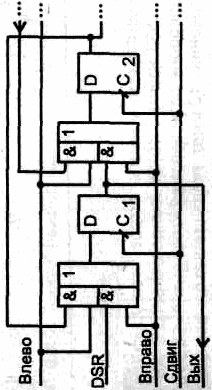
Сдвигающие регистры Последовательные (сдвигающие) регистры представляют собою цепочку разрядных схем, связанных цепями переноса. В однотактных регистрах со сдвигом на один разряд вправо (рис. 3.39, а) слово сдвигается при поступлении синхросигнала. Вход и выход последовательные (DSR — Data Serial Right). На рис. 3.39, б показана схема регистра со сдвигом влево (вход данных DSL — Data Serial Left), а на рис. 3.39, в иллюстрируется принцип построения реверсивного регистра, в котором имеются связи триггеров с обоими соседними разрядами, но соответствующими сигналами разрешается работа только одних из этих связей (команды "влево" и "вправо" одновременно не подаются).
Рис. 3.39. Схемы регистров сдвига вправо (а), влево (б) и реверсивного (в) Многотактные сдвигающие регистры управляются несколькими синхро-последовательностями. Из их числа наиболее известны двухтактные с основным и дополнительным регистрами, построенными на простых одноступенчатых триггерах, управляемых уровнем Универсальные регистры В сериях ИС и библиотеках БИС/СБИС программируемой логики имеется много вариантов регистров (в схемотехнике ТТЛШ их около 30). Среди них многорежимные (многофункциональные) или универсальные, способные выполнять набор микроопераций. Многорежимность достигается композицией в одной и той же схеме частей, необходимых для выполнения различных операций. Управляющие сигналы, задающие вид выполняемой в данное время операции, активизируют необходимые для этого части схемы. Регистры, имеющие разнотипные вход и выход, служат основными блоками преобразователей параллельных кодов в последовательные и обратно. Шинные формирователи Шинные формирователи (ШФ), называемые также приемопередатчиками, шинными драйверами или магистральными вентиль-буферами, включаются между источником информации и шиной. Они усиливают сигналы по мощности при работе на шину, отключают источник информации от шины, когда он не участвует в обмене, формируют при необходимости требуемые уровни сигналов логической 1 или 0. Двунаправленные ШФ позволяют в зависимости от сигнала управления передавать сигналы в шину или, напротив, принимать их с шины и передавать приемнику данных. Различные ШФ отличаются не только разрядностью, но и передачей сигналов в прямом или инвертированном виде (ШФИ), а также прямыми или инверсными сигналами разрешения работы. Отличаются они и электрическими характеристиками.
Буферные регистры Буферные регистры служат для подключения к магистрали внешнего устройства. В отличие от ШФ, буферные регистры способны хранить данные. Благодаря этому они могут выполнять временную буферизацию данных, что составляет важнейшую функцию портов. Буферные каскады с тремя состояниями на выходах регистра обеспечивают портам возможность отключения от магистрали под действием управляющих сигналов, а также необходимую нагрузочную способность. Через порты ввода данные от ВУ поступают в магистраль, а через порты вывода данные с магистрали передаются тому или иному модулю. Порты ввода-вывода могут выполнять обе указанные операции. Шинные формирователи и буферные регистры связывают, как правило, выходы МП с внешней средой, поскольку нагрузочная способность МП недостаточна.
Классификация счетчиков Понятие "счетчик" является очень широким. К счетчикам относят автоматы, которые под действием входных импульсов переходят из одного состояния в другое, фиксируя тем самым число поступивших на их вход импульсов в том или ином коде. Классификация счетчиков По способу кодирования внутренних состояний различают двоичные счетчики, счетчики Джонсона, счетчики с кодом "1 из N" и др. По направлению счета счетчики делятся на суммирующие (прямого счета), вычитающие (обратного счета) и реверсивные (с изменением направления счета). По принадлежности к тому или иному классу автоматов говорят о синхронных или асинхронных счетчиках (более подробную классификацию по этому признаку не затрагиваем, учитывая реальный состав микросхем счетчиков). Счетчики строятся из разрядных схем, имеющих межразрядные связи. Соответственно организации этих связей различают счетчики с последовательным, параллельным и комбинированными переносами. Возможные режимы работы счетчика: § регистрация числа поступивших на счетчик сигналов; § деление частоты. Как и любой автомат, счетчик можно строить на триггерах любого типа, однако удобнее всего использовать для этого триггеры типа Т (счетные) и JK, имеющие при J = К = 1 счетный режим. Состояние счетчика читается по выходам разрядных схем как слово Qn-1 Qn-2...Q0, входные сигналы поступают на младший разряд счетчика. Двоичным счетчиком назовем счетчик, имеющий модуль М = 2n, где n — целое число, и естественную последовательность кодов состояний (его состояния отображаются последовательностью двоичных чисел, десятичными эквивалентами которых будут числа 0, 1, 2, 3,..., М-1).
Двоичные счетчики Схему двоичного счетчика можно получить с помощью формального синтеза, однако более наглядным путем представляется эвристический. Таблица истинности двоичного счетчика — последовательность двоичных чисел от нуля до М—1. Наблюдение за разрядами чисел, составляющих таблицу, приводит к пониманию структурной схемы двоичного счетчика. Состояния младшего разряда при его просмотре по соответствующему столбцу таблицы показывают чередование нулей и единиц вида 01010101..., что естественно, т. к. младший разряд принимает входной сигнал и переключается от каждого входного воздействия. В следующем разряде наблюдается последовательность пар нулей и единиц вида 00110011.... В третьем разряде образуется последовательность из четверок нулей и единиц 00001111... и т.д. Из этого наблюдения видно, что следующий по старшинству разряд переключается с частотой, в два раза меньшей, чем данный. Представление счетчика цепочкой Т-триггеров справедливо как для суммирующего, так и для вычитающего вариантов, поскольку закономерность по соотношению частот переключения разрядов сохраняется как при просмотре таблицы сверху вниз (прямой счет), так и снизу вверх (обратный счет). Различия при этом состоят в направлении переключения предыдущего разряда, вызывающего переключение следующего. При прямом счете следующий разряд переключается при переходе предыдущего в направлении 1-0, а при обратном— при переключении 0-1. Следовательно, различие между вариантами заключается в разном подключении входов триггеров к выходам предыдущих. Если схема строится на счетных триггерах с прямым динамическим управлением, то характер подключения следующих триггеров к предыдущим для получения счетчиков прямого и обратного счета будет соответствовать рис. 3.43, б.
40. Запоминающие устройства. Основные параметры. Запоминающие устройства (ЗУ) служат для хранения информации и обмена ею с другими ЦУ. Микросхемы памяти в общем объеме выпуска ИС занимают около 40% и играют важнейшую роль во многих системах различного назначения. Микросхемы и системы памяти постоянно совершенствуются как в области схемотехнологии, так и в области развития новых архитектур. В настоящее время созданы и используются десятки различных типов ЗУ. Важнейшие параметры ЗУ находятся в противоречии. Так, например, большая информационная емкость не сочетается с высоким быстродействием, а быстродействие в свою очередь не сочетается с низкой стоимостью. Поэтому системам памяти свойственна многоступенчатая иерархическая структура, и в зависимости от роли того или иного ЗУ его реализация может быть существенно различной. В наиболее развитой иерархии памяти ЭВМ можно выделить следующие уровни: - регистровые ЗУ, находящиеся в составе процессора или других устройств (т. е. внутренние для этих блоков), благодаря которым уменьшается число обращений к другим уровням памяти, реализованным вне процессора и требующим большего времени для операций обмена информацией; - кэш-память, служащая для хранения копий информации, используемой в текущих операциях обмена. Высокое быстродействие кэш-памяти повышает производительность ЭВМ; - основная память (оперативная, постоянная, полупостоянная), работающая в режиме непосредственного обмена с процессором и по возможности согласованная с ним по быстродействию. Исполняемый в текущий момент фрагмент программы обязательно находится в основной памяти; - специализированные виды памяти, характерные для некоторых специфических архитектур (многопортовые, ассоциативные, видеопамять и др.); - внешняя память, хранящая большие объемы информации. Эта память обычно реализуется на основе устройств с подвижным носителем информации (магнитные и оптические диски, магнитные ленты и др.). В настоящем пособии устройства внешней памяти не рассматриваются. Важнейшие параметры ЗУ Информационная емкость — максимально возможный объем хранимой информации. Выражается в битах или словах (в частности, в байтах). Бит хранится запоминающим элементом (ЗЭ), а слово — запоминающей ячейкой (ЗЯ), т. е. группой ЗЭ, к которым возможно лишь одновременное обращение. Добавление к единице изм
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-09-20; просмотров: 519; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.91.130 (0.289 с.) |

 (2)
(2) (3)
(3)
 (4)
(4)

 (5)
(5)
 {0,1}. Символы Ci одного слова называют в цифровой технике битами. Слово z в двоичном представлении формируется путем последовательного присоединения отдельных битов, как это показано ниже:
{0,1}. Символы Ci одного слова называют в цифровой технике битами. Слово z в двоичном представлении формируется путем последовательного присоединения отдельных битов, как это показано ниже: