Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Общие принципы построения интеллектуальных САУ с использованием нейронных сетей.Содержание книги
Похожие статьи вашей тематики
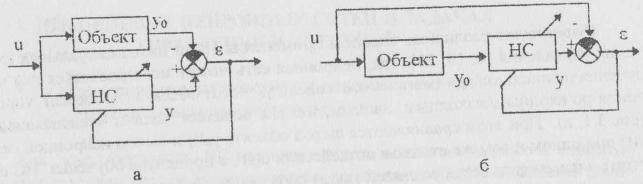
Поиск на нашем сайте НС начинают играть все более важную и заметную роль при создании систем автоматического управления (САУ) сложными техническими объектами и контроля за ними. К таким объектам относятся современные летательные аппараты, силовые и энергетические установки, роботы-манипуляторы и др. Для них характерны отсутствие точных математических моделей либо их чрезмерная сложность, высокая размерность пространства состояний и принимаемых решений по управлению, иерархичность, многообразие критериев качества, высокий уровень шумов и внешних возмущений. Существуют различные способы применения НС в интеллектуальных системах управления. Так, нейронная сеть может использоваться для получения нелинейной математической модели Другой вариант использования НС – получение инверсной (обратной) математической модели объекта управления (рис. 3.13, б). Здесь на вход нейронной сети подается выход объекта управления Возможно непосредственное включение НС в качестве регулятора в замкнутый контур управления объектом (рис. 3.13, в). При этом на вход нейронной сети подается сигнал ошибки управления Другой вариант использования НС – ее применение в качестве адаптера для подстройки параметров основного регулятора (рис. 3.13, г). Допустим, что уравнение динамики этого регулятора имеет вид
где Тогда обучение нейронной сети сводится в конечном итоге к формированию такого вектора параметров Возможны и другие варианты комбинированного применения НС наряду с традиционными алгоритмами управления. Так, на рис. 3.13, д нейронная сеть подключена параллельно линейному ПИ- или ПИД-регулятору, что позволяет в полной мере использовать преимущества обычных линейных регуляторов (высокая точность, простота, удобство доводки), а также существенно нелинейный характер, помехозащищенность и способность к обучению НС. На рис. 3.13, е нейронная сеть соединена последовательно с основным (линейным) регулятором. Ее назначение – линеаризация характеристик разомкнутой системы за счет построения инверсной модели объекта управления. Как и на рис. 3.13, в–г, целью обучения нейронной сети в последних двух случаях является приближение результирующих характеристик замкнутой системы к характеристикам эталонной модели, т.е. обеспечение желаемого вида уравнений САУ.
в
г
д
е Рис. 3.13. Схемы использования НС в САУ
|
||
|
|
Последнее изменение этой страницы: 2016-09-20; просмотров: 724; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.3 (0.011 с.) |

 объекта (процесса) управления по входным/выходным данным, т.е. для решения задачи идентификации (рис. 3.13, а). При этом сравниваются выход объекта
объекта (процесса) управления по входным/выходным данным, т.е. для решения задачи идентификации (рис. 3.13, а). При этом сравниваются выход объекта  и выход нейронной сети
и выход нейронной сети  при одном и том же входном воздействии
при одном и том же входном воздействии  , а процедура обучения НС состоит в изменении весов ее связей таким образом, чтобы уменьшить рассогласование
, а процедура обучения НС состоит в изменении весов ее связей таким образом, чтобы уменьшить рассогласование  до приемлемой (достаточно малой) величины.
до приемлемой (достаточно малой) величины. , а под желаемой реакцией НС понимается вход объекта
, а под желаемой реакцией НС понимается вход объекта  в процессе обучения НС, получаем в итоге
в процессе обучения НС, получаем в итоге  , т.е. обученная нейронная сеть воспроизводит нелинейную функциональную зависимость
, т.е. обученная нейронная сеть воспроизводит нелинейную функциональную зависимость  – инверсную модель объекта. Данный тип моделей используется, например, в задачах управления роботами-манипуляторами, когда требуется определить желаемый закон изменения управляющего воздействия
– инверсную модель объекта. Данный тип моделей используется, например, в задачах управления роботами-манипуляторами, когда требуется определить желаемый закон изменения управляющего воздействия  , обеспечивающий изменение вектора управляемых координат объекта
, обеспечивающий изменение вектора управляемых координат объекта  .
. , выход сети
, выход сети  одновременно является входом объекта, а цель обучения НС – уменьшить величину рассогласования
одновременно является входом объекта, а цель обучения НС – уменьшить величину рассогласования  между выходами объекта и эталонной модели системы. Таким способом достигается желаемая динамика САУ, причем в силу нелинейной природы НС возникает возможность высококачественного управления реальным объектом в широком диапазоне изменения режимов его работы и условий эксплуатации.
между выходами объекта и эталонной модели системы. Таким способом достигается желаемая динамика САУ, причем в силу нелинейной природы НС возникает возможность высококачественного управления реальным объектом в широком диапазоне изменения режимов его работы и условий эксплуатации. , (3.41)
, (3.41) ,
,  и
и  – соответственно коэффициенты усиления по пропорциональной, интегральной и дифференциальной составляющим (такой регулятор называется ПИД-регулятором).
– соответственно коэффициенты усиления по пропорциональной, интегральной и дифференциальной составляющим (такой регулятор называется ПИД-регулятором). основного регулятора, при котором обеспечивается минимальной рассогласование
основного регулятора, при котором обеспечивается минимальной рассогласование