Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Использование рлси сарп для обеспечения безопасного мореплавания.Содержание книги
Поиск на нашем сайте
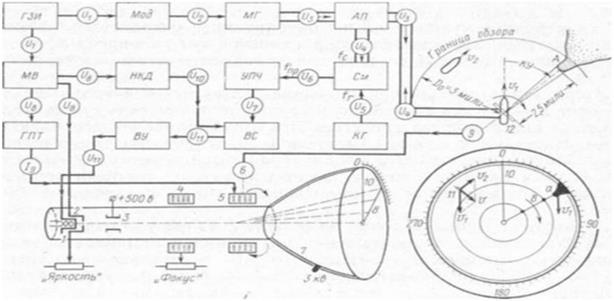
Принцип работы и погрешности РЛС. Радиолокационные станции (РЛС) предназначены для обнаружения местонахождения различ-ных объектов и наблюдения за окружающей надводной обстановкой в условиях плохой видимости. В РЛС используется явление отражения радиоволн от различных объектов, расположенных на пути их распространения, таким образом, в радиолокации используется явление эха. РЛС содержит передатчик, приемник, антенно-волноводное устройство, индикатор с экраном для визуального наблюдения эхо-сигналов. Принцип работы РЛС. Передатчик станции вырабатывает мощные высокочастотные импульсы электромагнитной энергии, которые с помощью антенны посылаются в пространство узким лучом. Отраженные от какого-либо объекта (судна, высокого берега и т. п.) радиоимпульсы возвращаются в виде эхо-сигналов к антенне и поступают в приемник. По направлению узкого радиолокационного луча, который в данный момент отразился от объекта, можно определить пеленг или курсовой угол объекта. Измерив промежуток времени между посылкой импульса и приемом отраженного сигнала, можно получить расстояние до объекта. Так как при работе РЛС антенна вращается, излучаемые импульсные колебания охватывают весь горизонт. Поэтому на экране индикатора судовой РЛС создается изображение окружающей судно обстановки. Принятые эхо-сигналы после преобразования и усиления в приемнике поступают в индикатор, снабженный электронно-лучевой трубкой. Экран электронно-лучевой трубки покрыт особым составом, обладающим свойством послесвечения, поэтому эхо-сигналы, возникающие на экране индикатора, угасают постепенно. Центральная светящаяся точка на экране индикатора РЛС отмечает место судна, а идущая от этой точки светящаяся линия показывает курс. Изображение различных объектов на экране индикатора "может быть ориентировано относительно диаметральной плоскости судна (стабилизация по курсу) или относительно истинного меридиана (стабилизация по норду). Направления на объекты определяются по азимутальному кругу соответственно ориентированного или по курсу, или по норду. В последнем случае азимутальный круг должен быть связан с репитером гирокомпаса. По светящимся на экране индикатора градуированным неподвижным кольцам дальности определяется расстояние до нужного объекта, который изображается светящимся пятном, если это одиночный предмет (судно, маяк), или волнистой линией (береговая черта и т. д.). Для точного измерения расстояния имеется дальномерное устройство с подвижным кругом дальности. «Дальность видимости» РЛС достигает нескольких десятков миль. Однако дальность обнаружения зависит от отражательной способности объектов. На дальность обнаружения РЛС, кроме технических данных станции, влияют гидрометеорологические факторы. Судовые РЛС позволяют осуществлять плавание в узкостях, расхождение судов и определение места судна по береговым ориентирам или радиолокационным маякам в условиях плохой видимости; за короткий промежуток времени определять курс и скорость встречного судна и избегать таким образом столкновения. Однако РЛС имеет ряд недостатков: ограниченная дальность действия; значительная «мертвая зона», т. е. минимальная дальность обнаружения, которая составляет от 30 до' 120 м по расстоянию и 1,8-1,1° по азимуту; сложность устройства РЛС, затрудняющая ремонт в судовых условиях. Структурная схема РЛС изображена на Рис.36
Рис.36. Структурная схема РЛС
Магнетрон генерирует зондирующий импульс мощностью 70—80 квт длиной волны 1=3, 2 см, частотой /с = 9400Мгц. Импульс магнетрона через антенный переключатель (АП) по специальному волноводу подводится к антенне и излучается в пространство узким направленным лучом. Ширина луча в горизонтальной плоскости 1—2°, а вертикальной около 20°. Антенна, вращаясь вокруг вертикальной оси со скоростью 12—30 об/мин, облучает все окружающее судно пространство. fПР=fГ—fС=60 Мгц, которая затем поступает на усилитель промежуточной частоты (УПЧ), он усиливает отраженные импульсы. С помощью детектора, стоящего на выходе УПЧ, усиленные импульсы преобразуются в видеоимпульсы, которые через видеосмеситель (ВС) поступают на видеоусилитель. Здесь они усиливаются и поступают на катод электроннолучевой трубки (ИКО). Погрешности РЛС. Основными составляющими погрешности измерения направления являются: - погрешность визирования (зависит от размера отметки, положения ее относительно центра экрана и конструкции визира),носящая случайный характер; -погрешность системы передачи угла с антенны на индикатор (зависит от типа системы), носящая систематический характер; - погрешность центровки начала развертки на индикаторе (только для механического визира), имеющая систематический характер; - погрешность передачи курса от гирокомпаса, имеющая систематический характер. Погрешность измерения, указанная в паспорте РЛС, соответствует условиям наблюдения объекта на краю экрана (более 2/3 радиуса) при отсутствии качки судна. Учитывая уменьшение точности вблизи центра экрана, рекомендуется выполнять пеленгование при положении отметки объекта на расстоянии больше половины радиуса экрана. При больших значениях качки (бортовой до 12°, килевой до 6°) ошибка пеленгования может увеличиться на 0,5°. Требования ИМО к РЛС Ассамблея, принимая во внимание Статью 16 (j) Конвенции о Международной морской организации, касающуюся функций Ассамблеи, принимая во внимание Правило 12 Главы 5 Международной конвенции по охране человеческой жизни на море 1974 г., с учетом уточнений, принимая во внимание Резолюцию А.222(7),- ЗАМЕНЕНА НА А.477(12) касающуюся технико-эксплуатационных параметров РЛС, признавая желательным согласовать такие требования к технико-эксплуатационным параметрам судовых РЛС с технико-эксплуатационными требованиями к САРП (Резолюция А.839(19) принимает Рекомендации по технико-эксплуатационным требованиям к параметрам судовых РЛС, которые указаны в приложении к настоящей Резолюции ТАКОЙ РЕЗОЛЮЦИИ НЕТ рекомендует Правительствам, чтобы: технико-эксплуатационные параметры судового радиолокационного оборудования, устанавливаемого с 1 января 1984 г., не уступали параметрам, указанным в приложении к настоящей Резолюции технико-эксплуатационные параметры судового радиолокационного оборудования, установленного до 1 января 1984 г., по крайней мере удовлетворяли параметрам, указанным в Резолюции А477(12) Область применения. 1.1.Данные технико-эксплуатационные требования относятся ко всему судовому радиолокационному оборудованию, установленному с 1 января 1984 г. В соответствии с правилом 12 (в уточненной редакции) Главы 4 Международной конвенции по охране человеческой жизни на море 1974 г. 1.2.РЛС, установленные до 1 января 1984 г., должны по крайней мере удовлетворять технико-эксплуатационным требованиям, рекомендуемым Резолюцией А.222(7). ----На А.477(12) Назначение. Радиолокационная станция (РЛС) должна обеспечивать индикацию относительного положения судов, других надводных объектов, буев, береговой черты и навигационных знаков так, чтобы способствовать навигации и предупреждению столкновений. Требования. Все РЛС должны соответствовать следующим минимальным требования. 3.1.Максимальная дальность. При нормальных условиях распространения, когда антенна РЛС расположена на высоте 15 м над уровнем моря, при отсутствии помех от моря РЛС должна обеспечивать четкую индикацию: 3.1.1.Береговой черты - при высоте берега до 60 м на расстоянии 20 миль при высоте берега до 6 м на расстоянии 7 миль 3.1.2.Надводных объектов - судов валовой вместимостью 5000 т на расстоянии 7 миль независимо от ракурса небольшого судна длиной 10 м на расстоянии 3 мили объектов, аналогичных навигационному бую, имеющих эффективную поверхность рассеивания приблизительно 10 кв.м на расстоянии 2 мили Параметры РЛС должны быть такими, чтобы при бортовой и килевой качках ±10° характеристики обнаружения удовлетворяли этим требованиям. 3.2.Минимальная дальность. Надводные объекты, указанные в п. 3.1.2. настоящих Рекомендаций, должны быть четко видны с минимального расстояния 50 м до расстояния 1 миля при неизменном положении органов управления, кроме переключателя шкал дальности. 3.3.Индикатор. 3.3.1.Без применения внешних увеличительных устройств индикатор должен обеспечивать отображение относительного движения при ориентации относительно диаметральной плоскости судна без стабилизации на экране с эффективным диаметром не менее чем 180 мм для судов валовой вместимостью от 500 до 1600 т. 250 мм для судов валовой вместимостью от 1600 до 10000 т. 340 мм при наличии на судне одного индикатора и 250 мм в случае установки второго индикатора для судов валовой вместимостью 10000 т и выше. (Обеспечиваются на ЭЛТ с диаметром 9, 12 и 16 дюймов соответственно) 3.3.2.Индикатор должен предусматривать один из двух наборов шкал дальности: 1.5, 3, 6, 12 и 24 мили и одна шкала с номиналом более 0.5 и менее 0.8 мили либо 1, 2, 4, 8, 16 и 32 мили Могут быть предусмотрены дополнительные шкалы. 3.3.3.В любое время должна предусматриваться четкая индикация выбранной шкалы дальности и интервала между кольцами дальности. 3.4.Измерение дальности. 3.4.1.Для измерения дальности должны быть предусмотрены неподвижные электронные кольца дальности; Для набора шкал, соответствующих требованию подпункта 3.3.2.1, на шкале с номиналом более 0.5 и менее 0.8 мили должно обеспечиваться, по крайней мере 2 кольца дальности и для каждой из остальных шкал - по 6 колец дальности Для набора шкал дальности, соответствующих требованию подпункта 3.3.2.2, на каждой шкале должно быть 4 кольца дальности 3.4.2.Подвижный электронный маркер дальности должен иметь цифровой отчет. 3.4.3.Неподвижные кольца дальности и неподвижный маркер дальности должны обеспечивать измерения дальности до объекта с погрешностью, не превышающей 1.5% от максимального значения используемой шкалы или 70 м, в зависимости от того, что больше. 3.4.4.Должна быть предусмотрена возможность изменения яркости подвижных колец дальности и неподвижного маркера дальности до полного снятия с экрана. 3.5.Отметка курса. 3.5.1.Курс судна должен указываться на экране с максимальной погрешностью не более ±1є. Ширина линии отметки курса должна быть не более 0.5є. 3.5.2.Должны быть приняты меры для выключения отметки курса с помощью переключателя, который не может оставаться постоянно в положении < Отметка курса выключена>. 3.6.Измерение направлений. 3.6.1.Должны быть приняты меры для быстрого измерения направления на любой объект, отметка которого появляется на экране. 3.6.2.Средства, предусмотренные для измерения направлений, должны обеспечивать измерение направления на объект, отметка которого расположена на краю экрана, с погрешностью, не превышающей ± 1°. 3.7.Разрешающая способность. 3.7.1.Индикатор должен обеспечивать на шкале дальности 2 мили или менее раздельное отображение двух одинаковых целей малого размера на расстояниях, равных 50 - 100 % от номинала используемой шкалы дальности и находящихся на одном направлении, если расстояние между целями не менее 50 м. 3.7.2.Индикатор должен обеспечивать раздельное отображение двух одинаковых целей малого размера, находящихся на одном расстоянии между 50 и 100 % от номинала шкалы < 1.5 > или < 2 > мили и их угловом положении, различающемся 2.5°. 3.8.Вращение антенны. Должно быть предусмотрено непрерывное и автоматическое вращение антенны почасовой стрелки в пределах 360° по азимуту. Частота вращения антенны должна быть не менее 12 об/мин. 3.9.Антенна должна быть работоспособна при относительной скорости ветра до 100уз. Должны быть приняты меры для возможности азимутальной стабилизации РЛС от гирокомпаса, для чего в РЛС должен быть предусмотрен соответствующий вход. 3.9.1.Погрешность согласования с гирокомпасом должна быть в пределах 0.5° при скорости вращения датчика гирокомпаса 2 об/мин. 3.9.2.РЛС должна работать удовлетворительно при ориентации изображения по курсу без стабилизации изображения, когда связь с гирокомпасом отсутствует. 3.10.Контроль работоспособности. Должны быть предусмотрены средства для быстрого определения во время работы станции значительного ухудшения ее работоспособности относительно калиброванного значения, принятого при установке РЛС, а также для правильной настройки в случае отсутствия целей. 3.11.Устройства для защиты от помех. Должны быть предусмотрены средства для подавления нежелательных отражений от моря, дождя и других осадков, облаков и самумов (песчаных бурь). Должна быть предусмотрена возможность ручной плавной регулировки органов управления средств помехозащиты. Орган управления в крайнем положении против часовой стрелки должен отключаться. Могут быть предусмотрены дополнительные автоматические органы помехозащиты, однако должна быть возможность их отключения. 3.12.Работа станции. 3.12.1.Должно быть предусмотрено включение станции и управление ею с индикатора. 3.12.2.Рабочие органы управления должны быть доступны, легко различимы и удобны в эксплуатации. Если используются символы, то они должны выполнятся в соответствии с Рекомендациями ИМО для органов управления морского навигационного радиолокационного оборудования. 3.12.3.РЛС должна быть полностью в рабочем состоянии в течении 4 минут после ее включения. На современных РЛС картинка появляется через 6 сек. после включения станции. 3.12.4.Должно быть предусмотрено положение предварительной готовности, из которого станция может быть приведена полностью в рабочее состояние за 15 сек. 3.13.Стабилизация относительно воды и грунта (индикатор истинного движения). 3.13.1.При использовании стабилизации изображения относительно воды или грунта точность и разрешающая способность должны быть по крайней мере равными требованиям настоящих Рекомендаций. 3.13.2.Перемещение начала развертки, кроме индикаторов с ручным возвратом, должно ограничиваться кругом радиусом не более 75 % от радиуса экрана. 3.14.Антенна. Антенна должна быть установлена таким образом, чтобы существенно не ухудшалась эффективность РЛС. 3.15.Работа с радиолокационными маяками. 3.15.1.Все РЛС, работающие в диапазоне 3 см, должны работать горизонтально поляризованным излучением. 3.15.2.Должна быть предусмотрена возможность выключения устройства обработки сигналов, которые могут исключить изображение сигналов маяка на экране РЛС. Установка нескольких РЛС. 4.1.На судах, где требуется установка двух РЛС, они должны быть размещены таким образом, чтобы каждая РЛС могла работать самостоятельно и обе могли работать одновременно независимо друг от друга. Каждая РЛС должна иметь возможность подключения к аварийному источнику питания, если такой предусмотрен в соответствии с требованиями Правил 1 Главы 11 Конвенции СОЛАС-74. 4.2.При установке двух РЛС может быть предусмотрено устройство взаимного переключения приборов для повышения гибкости и готовности радиолокационной установки. Оно должно быть установлено так, чтобы неисправность любой РЛС не вызывало отключения электропитания или другого нарушения в работе РЛС. Все РЛС должны удовлетворять вышеперечисленным требованиям для обеспечения безопасности мореплавания, в противном случае не допускается установка и эксплуатация таких станций.
|
||||
|
|
Последнее изменение этой страницы: 2016-12-30; просмотров: 3117; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.135.194.138 (0.01 с.) |