
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Кинематика и синтез механизмовСодержание книги
Поиск на нашем сайте
С низшими кинематическими парами Задачи исследования кинематики. Исходные данные. Методы исследования В этом разделе изучается движение звеньев механизма и их точек вне зависимости от причин, вызывающих это движение. Основной задачей раздела является определение закона преобразования движения в механизме. Эта задача распадается на следующие. 1. Определение положений звеньев и траекторий отдельных их точек. 2. Определение угловых скоростей звеньев и линейных скоростей их точек и аналогов скоростей. 3. Определение угловых ускорений звеньев и линейных ускорений их точек и аналогов ускорений. И с х о д н ы е д а н н ы е. 1. Кинематическая схема механизма со всеми кинематическими размерами его звеньев. 2. Закон движения ведущего (входного) звена (как правило, М е т о д ы и с с л е д о в а н и я. 1. Аналитический метод. 2. Метод планов положений, скоростей и ускорений (графо-аналитический метод). 3. Метод кинематических диаграмм (метод графического дифференцирования). 4. Экспериментальный метод.
Кинематические и передаточные функции механизмов
Под стрелками указаны параметры входа:
Зависимости параметров выхода от времени являются законом движения выходного звена и называются также кинематическими функциями. Они представляются в форме Зависимость параметров выхода механизма от параметров входа характеризует внутреннее свойство механизма преобразовать движение независимо от времени. Первой зависимостью такого рода является функция положения механизма, устанавливающая связь между перемещением выходного звена и углом поворота (то есть перемещением) входного звена, то есть
Вторая производная функции положения по параметру
Нетрудно установить связь между кинематическими функциями и их аналогами. Для этого необходимо иметь в виду, что
откуда следует, что аналог скорости является отношением скорости выходного звена к угловой скорости входного, и
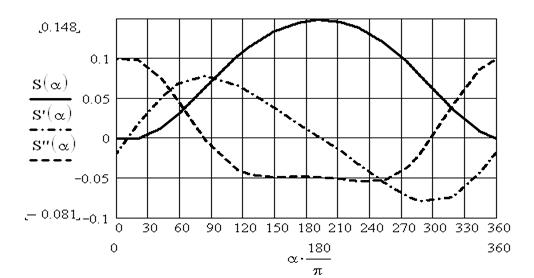
Из этого выражения видно, что аналог ускорения представляет собой отношение ускорения выходного звена к квадрату угловой скорости входного звена. Поэтому можно утверждать, что аналоги скоростей и ускорений являются внутренними характеристиками механизма, отражающими закон преобразования движения и не зависящими от времени. Аналитический метод Метод заключается в определении математических выражений, описы-вающих функциональную связь между входными и выходными параметрами механизма. Для этого служат различные приёмы и методы, такие как метод векторных контуров, который образуется заменой кинематических размеров звеньев векторами, с последующим проецированием этого контура на оси системы координат и получением на этой основе соответствующих уравнений, описывающих кинематику данного механизма. Этой же цели служит метод разбиения схемы механизма на прямо- или косоугольные треугольники, решая которые, получают необходимые математические выражения. Для составления некоторого первоначального представления о методе рассмотрим кинематику двух несложныхмеханизмов. С и н у с н ы й м е х а н и з м (рис. 3.2) состоит из кривошипа, вращающегося вокруг неподвижной точки О, конец А которого образует вращательную кинематическую пару с ползуном 2. Ползун движется по вертикальному элементу ведомого звена 3, которое движется вдоль неподвижных горизонтальных направляющих. На первом этапе определяется зависимость перемещения S ведомого звена от угла α поворота ведущего кривошипа 1. Из рис. 3.2 видно, что
Дифференцируя по
дифференцируя во второй раз, получаем аналог ускорения ведомого звена
Для расчёта скорости и ускорения ведомого звена необходимо воспользоваться выражениями
К р и в о ш и п н о-п о л з у н н ы й м е х а н и з м (рис. 3.3) широко известен тем, что применяется во многих областях техники, например в качестве основного механизма двигателей внутреннего сгорания, поршневых насосов, компрессоров, в полиграфической технике – в станках для обработки стереотипов и др. Схему механизма возьмём в наиболее общем виде, когда направляющая точки B не проходит через центр вращения кривошипа O 1, а располагается от неё на расстоянии e, называемом эксцентриситетом. В данной схеме эксцентриситет принимается отрицательным, так как отложен вниз от точки O 1. Если он отложен вверх, то считается положительным. В связи с наличием e механизм называется эксцентричным или нецентральным. Он состоит из кривошипа 1, вращающегося относительно стойки 0 вокруг точки O 1 с угловой скоростью ω 1, так что точка A описывает окружность радиусом r. От кривошипа движение передаётся с помощью шатуна 2 длиной l на ползун 3, который движется возвратно-поступательно вдоль горизонтальных направляющих. В крайнем правом положении точка B ползуна занимает положение B 0. При этом кривошип 1 и шатун 2 выстраиваются в одну прямую O 1 B 0, образующую угол ν (ню) с горизонталью, синус которого определяется формулой
Как видно из рис. 3.3, перемещение точки B от крайнего положения B 0 можно выразить как S=DB 0 – DB, причём, DB 0, согласно теореме Пифагора, определяется как Для определения угла денные выражения, получаем
Или
Для перехода к аналогам скорости и ускорения необходимо это выражение продифференцировать дважды по
С привлечением для вычислительного процесса такого математического пакета, как MathCAD, нет необходимости выводить расчётные зависимости
Пример. Рассмотрим составление программы и решение по ней задачи исследования кинематики кривошипно-ползунного механизма в математическом пакете MathCAD 2001i Professional (Листинг 3.1)
Так как угол удобнее брать в градусах, а программа MathCAD требует применения угла в радианной мере, то на графиках ось абсцисс обозначена формулой перевода угла α из радианной меры в градусную. Для получения численных результатов анализа необходимо ввести ранжированную переменную
Для расчёта скоростей и ускорений точки B ползуна достаточно воспользоваться следующими формулами перехода
При этом те же графики, но с другими масштабами по осям ординат будут графиками изменения указанных кинематических функций. Численные значения кинематических функций можно получить также с помощью введения ранжированной переменной.
3.4. Метод планов положений, скоростей и ускорений
О п р е д е л е н и е ф у н к ц и и п о л о ж е н и я. При использовании графоаналитического метода определение функции положения механизма производится с помощью разметки механизма. Разметка механизма – это ряд последовательных его положений, построенных в зависимости от положений входного звена, охватывающих весь цикл его движения (как правило, один оборот). Каждый механизм в соответствии с его кинематической схемой имеет свои особенности в построении разметки. Для примера на рис. 3.4 приведена разметка кривошипно-ползунного механизма. Она строится в некотором масштабе µl, начиная от одного из крайних положений, отмечаемого нулевым номером. Затем окружность, описываемая концом A входного звена (кривошипа), делится на двенадцать равных частей, которые обозначаются номерами в направлении угловой скорости A 0, A 1, A 2, …, A 12. После этого строятся положения остальных звеньев механизма, и траектории заданных точек. В частности, положения точки B строятся раствором циркуля, игла которого ставится в точках A, а карандашом делаются засечки на направляющей точки B радиусом, равным длине шатуна l в масштабе построения. В результате этих действий получаются точки B 0, B 1, B 2, …, B 12.
Рисунок 3.4
Для построения траектории точки S 2 шатуна необходимо взять в масштабе расстояние от точки A до точки S 2 и отложить это расстояние во всех положениях шатуна в направлении к точке B. Затем соединить последовательно полученные на шатуне точки. С помощью разметки легко определить путём измерений перемещения точки В ведомого звена, соответствующие углам поворота кривошипа, и представить их в виде графика или таблицы. Это и будет функция положения механизма. Необходимые действия можно представить в такой форме
где n – количество положений механизма в цикле, в большинстве случаев О с н о в ы т е о р и и м е т о д а п л а н о в с к о р о с т е й и у с к о -
Построение плана скоростей сводится к реализации известного положения теоретической механики, согласно которому при плоско-параллельном (или сложном) движении твёрдого тела (звена) абсолютная скорость любой его точки равна векторной сумме скорости в переносном движении вместе с другой точкой, принятой в качестве полюса, и скорости её в относительном движении относительно этого полюса, то есть
В первом случае и переносным, и относительным движениями является поступательное (рис. 3.5, а). При этом составляется векторное уравнение на основе упомянутого выше положения вида
Во втором случае переносным движением является поступательное, а относительным – вращательное (рис. 3.5, б). Первое векторное уравнение требуется в виде В третьем случае переносным движением является вращательное, а относительным – поступательное (рис. 3.5, в). Векторное уравнение для построения плана ускорений записывается в таком виде Рассмотрим построение планов скоростей и ускорений механизмов с группами Ассура второго класса в порядке их усложнения.
М е х а н и з м с г р у п п о й А с с у р а 2-го к л а с с а 5-г о в и д а. Примером механизма, содержащим группу Ассура 2-го класса 5-го вида в простейшем её виде, является ранее рассмотренный синусный механизм (рис. 3.6). Изобразим его снова в некотором масштабе
Точка A движется вместе с кулисой в переносном поступательном движении и относительно кулисы в относительном движении. Свяжем движение точки A с движением точки A 3 и запишем уравнение В последнем уравнении Построение плана скоростей начинается с выбора масштаба μV и произвольной точки П (прописная греческая буква «пи»), принимаемой в качестве полюса плана (рис. 3.6 б). Из этой точки строится отрезок Переходим к построению плана ускорений. Векторное уравнение ускорений записывается аналогично соответствующему уравнению скоростей Выбираем произвольную точку π (рис. 3.6 в) в качестве полюса и масштаб В заключение в соответствии с масштабами планов вычисляем величины искомых скоростей и ускорений:
– абсолютная скорость кулисы – скорость кулисы относительно камня – абсолютное ускорение кулисы – ускорение кулисы относительно камня Рассмотрим построение планов скоростей и ускорений на примере криво-шипно-ползунного механизма, в составе которого имеется одна группа Ассура, а именно, группа Ассура 2-го класа 2-го вида (рис. 3.7, а). Схема механизма должна быть изображена в масштабе Её скорость по величине равна произведению угловой скорости
Скорость точки В определяется векторным равенством Построение вектора скорости центра масс шатуна
в которой все члены записаны в виде отрезков. Из этой пропорции следует, что отрезок Построение плана ускорений производится в той же последовательности, что и плана скоростей. При этом используется векторное равенство Определение ускорения центра масс S 2производится точно так же, как это делалось для определения его скорости согласно теореме подобия. Используя планы, легко найти физические величины скоростей и ускорений, для чего необходимо измерить отрезки в миллиметрах, выражающие скорости и ускорения, и умножить их на соответствующий масштаб: – абсолютная скорость ползуна 3 (точки В): – относительная скорость точки В: – абсолютная скорость центра масс S 2 шатуна 2: – угловая скорость шатуна 2: – абсолютное ускорение ползуна 3 (точки B): – тангенциальное ускорение точки В относительно точки А:
– полное относительное ускорение точки B: – абсолютное ускорение центра масс S 2 шатуна 2: – угловое ускорение шатуна 2: М е х а н и з м с г р у п п о й А с с у р а 2-г о к л а с с а 1-г о в и д а. Как было отмечено в разделе структуры механизмов, группа Ассура 1-го вида состоит из двух звеньев и трёх вращательных кинематических пар. Механизм с такой группой является четырёхшарнирным механизмом (рис. 3.8, а). Векторное уравнение для построения плана скоростей составляется так же, как и в предыдущем механизме, и записывается
к которому необходимо добавить ещё одно в силу недостаточности количества известных величин
| |||||||||||
|
| Поделиться: |

 ).
). Как известно, в любом механизме имеется входное звено, в технологических машинах совпадающее с ведущим звеном, и выходное звено, связанное с исполнительным органом машины. На рис. 3.1 в блочном представлении изображён произвольный механизм. Стрелками на рисунке показаны входное и выходное звенья.
Как известно, в любом механизме имеется входное звено, в технологических машинах совпадающее с ведущим звеном, и выходное звено, связанное с исполнительным органом машины. На рис. 3.1 в блочном представлении изображён произвольный механизм. Стрелками на рисунке показаны входное и выходное звенья. – угол поворота ведущего звена и
– угол поворота ведущего звена и  – его угловая скорость, и выхода, для наиболее часто встречающегося случая поступательного движения выходного звена: S – перемещение, V – скорость и
– его угловая скорость, и выхода, для наиболее часто встречающегося случая поступательного движения выходного звена: S – перемещение, V – скорость и  ,
,  , называемой скоростью, и
, называемой скоростью, и  , называемой ускорением.
, называемой ускорением. . Первая производная функции положения по
. Первая производная функции положения по  .
. .
. . Тогда последние два выражения можно переписать так:
. Тогда последние два выражения можно переписать так: ,
, .
. .
.
 ,
, .
.

 , и точка A занимает положение A 0 на линии O 1 B 0. В текущем положении кривошип 1 повернут относительно его крайнего положения на угол α в сторону вращения. При этом точка B переместилась от её крайнего положения на величину S.
, и точка A занимает положение A 0 на линии O 1 B 0. В текущем положении кривошип 1 повернут относительно его крайнего положения на угол α в сторону вращения. При этом точка B переместилась от её крайнего положения на величину S. Задача исследования кинематики механизма состоит в определении функции положения
Задача исследования кинематики механизма состоит в определении функции положения  , а
, а  .
. выразим длину вертикального отрезка
выразим длину вертикального отрезка  двумя путями, получая двойное равенство: имеем
двумя путями, получая двойное равенство: имеем  , от-куда
, от-куда  , или
, или  , где
, где  , является одной из геометрических характеристик механизма и находится обычно в пределах
, является одной из геометрических характеристик механизма и находится обычно в пределах  , а
, а  . Имея в виду соотношение между синусом и косинусом, получаем
. Имея в виду соотношение между синусом и косинусом, получаем  . Подставляя в S все най-
. Подставляя в S все най- .
. .
. и
и  .
. и
и  , так как сама программа по соответствующей команде выведет необходимые выражения и выполнит по ним расчёт.
, так как сама программа по соответствующей команде выведет необходимые выражения и выполнит по ним расчёт.


 , которой нужно задать пределы изменения от 0 до
, которой нужно задать пределы изменения от 0 до  и шаг. Необходимо также ввести эту переменную как аргумент для изменения
и шаг. Необходимо также ввести эту переменную как аргумент для изменения  .
. и
и  .
.
 , м
, м  ,
, . Si обозначает натуральное значение перемещения точки B,
. Si обозначает натуральное значение перемещения точки B,  – перемещение в том же положении, но в масштабе разметки.
– перемещение в том же положении, но в масштабе разметки. , где
, где  – вектор абсолютной скорости точки, то есть её скорости относительно стойки;
– вектор абсолютной скорости точки, то есть её скорости относительно стойки;  – вектор скорости точки в переносном движении вместе с полюсом;
– вектор скорости точки в переносном движении вместе с полюсом;  – вектор её скорости относительно полюса. Рассуждая формально, можно заключить, что согласно приведённому векторному равенству, план скоростей представляет собой некий треугольник, который необходимо построить. Построение треугольника возможно в следующих случаях: если известны все три его стороны, если известны две стороны и угол между ними и, наконец, если известна одна сторона и направления двух других сторон. Последний случай чаще всего и встречается в практике построения планов скоростей. Причём известной стороной искомого треугольника (плана скоростей) является вектор
– вектор её скорости относительно полюса. Рассуждая формально, можно заключить, что согласно приведённому векторному равенству, план скоростей представляет собой некий треугольник, который необходимо построить. Построение треугольника возможно в следующих случаях: если известны все три его стороны, если известны две стороны и угол между ними и, наконец, если известна одна сторона и направления двух других сторон. Последний случай чаще всего и встречается в практике построения планов скоростей. Причём известной стороной искомого треугольника (плана скоростей) является вектор  С ускорениями задача более сложна. Здесь приходится учитывать, какое по характеру движение относится к переносному и какое – к относительному.
С ускорениями задача более сложна. Здесь приходится учитывать, какое по характеру движение относится к переносному и какое – к относительному.  , в котором
, в котором  – вектор абсолютного ускорения данной точки;
– вектор абсолютного ускорения данной точки;  – вектор переносного ускорения;
– вектор переносного ускорения;  – вектор относительного ускорения. Вектор
– вектор относительного ускорения. Вектор  , в которой
, в которой  есть
есть  точки в её относительном вращательном движении на радиусе вращения
точки в её относительном вращательном движении на радиусе вращения  , или через угловую скорость
, или через угловую скорость  этого вращения по формулам
этого вращения по формулам  . Этот вектор направлен к центру относительного вращения точки по радиусу
. Этот вектор направлен к центру относительного вращения точки по радиусу  тангенциальной составляющей полного относительного ускорения направляется перпендикулярно радиусу относительно вращения
тангенциальной составляющей полного относительного ускорения направляется перпендикулярно радиусу относительно вращения  , где двумя чертами подчёркнуты векторы, известные по величине и по направлению, одной – только по направлению. Вектор левой части уравнения может быть известен по направлению, и тогда план ускорений строится без затруднений. Если его направление неизвестно, то должна быть возможность составления второго аналогичного уравнения, которое совместно с первым составит систему двух уравнений с четырьмя неизвестными, которая решается путём построения плана ускорений.
, где двумя чертами подчёркнуты векторы, известные по величине и по направлению, одной – только по направлению. Вектор левой части уравнения может быть известен по направлению, и тогда план ускорений строится без затруднений. Если его направление неизвестно, то должна быть возможность составления второго аналогичного уравнения, которое совместно с первым составит систему двух уравнений с четырьмя неизвестными, которая решается путём построения плана ускорений. . В этом уравнении второе слагаемое правой части представляет собой Корио′лисово ускорение. Его величина находится по формуле
. В этом уравнении второе слагаемое правой части представляет собой Корио′лисово ускорение. Его величина находится по формуле  , в которой
, в которой  – угловая скорость переносного движения,
– угловая скорость переносного движения,  в сторону переносной угловой скорости
в сторону переносной угловой скорости  имеет неизвестную величину, а направлен параллельно вектору относительной скорости
имеет неизвестную величину, а направлен параллельно вектору относительной скорости  . В правой части этого уравнения вектор
. В правой части этого уравнения вектор  определяется как и все нормальные составляющие ускорений и, таким образом, известен и по величине, и по направлению (подчёркнут двумя чертами), а вектор
определяется как и все нормальные составляющие ускорений и, таким образом, известен и по величине, и по направлению (подчёркнут двумя чертами), а вектор  известен по направлению линии действия (подчёркнут одной чертой). Эти уравнения и составляют систему, которая позволяет определить
известен по направлению линии действия (подчёркнут одной чертой). Эти уравнения и составляют систему, которая позволяет определить  с помощью построения плана ускорений.
с помощью построения плана ускорений. в произвольном положении (рис. 3.6, а). На рисунке буквой O 1 отмечен центр вращения кривошипа 1, вращающегося с угловой скоростью ω 1 в направлении, указанном стрелкой. В данный момент его положение определяется произвольным углом α. Геометрический центр вращательной кинематической пары A обозначен в скобках A1 и A 2, так как эта точка принадлежит одновременно и звену 1, и звену 2. Кулисный камень 2 движется относительно вертикального участка звена 3 (кулисы), которое движется относительно неподвижных направляющих в горизонтальном направлении. Буквой A 3 обозначена точка кулисы 3, совпадающая в данный момент с точкой A. Задача исследования кинематики механизма заключается в определении скорости и ускорения кулисы 3, т. е. её точки A 3. Что касается положения кулисы, то оно полностью определяется углом поворота кривошипа α.
в произвольном положении (рис. 3.6, а). На рисунке буквой O 1 отмечен центр вращения кривошипа 1, вращающегося с угловой скоростью ω 1 в направлении, указанном стрелкой. В данный момент его положение определяется произвольным углом α. Геометрический центр вращательной кинематической пары A обозначен в скобках A1 и A 2, так как эта точка принадлежит одновременно и звену 1, и звену 2. Кулисный камень 2 движется относительно вертикального участка звена 3 (кулисы), которое движется относительно неподвижных направляющих в горизонтальном направлении. Буквой A 3 обозначена точка кулисы 3, совпадающая в данный момент с точкой A. Задача исследования кинематики механизма заключается в определении скорости и ускорения кулисы 3, т. е. её точки A 3. Что касается положения кулисы, то оно полностью определяется углом поворота кривошипа α.
 . В результате сложения этих двух прямолинейных движений получается абсолютная скорость точки A. Так как требуется определить
. В результате сложения этих двух прямолинейных движений получается абсолютная скорость точки A. Так как требуется определить  , то это уравнение удобнее представить в виде
, то это уравнение удобнее представить в виде  . Но
. Но  , поэтому
, поэтому  .
. – вектор абсолютной скорости точки A 3 (следовательно, и самой кулисы), направленный по горизонтали и подчёркнутый одной чертой, как известный по направлению;
– вектор абсолютной скорости точки A 3 (следовательно, и самой кулисы), направленный по горизонтали и подчёркнутый одной чертой, как известный по направлению;  – вектор абсолютной скорости точки A, определяемой формулой
– вектор абсолютной скорости точки A, определяемой формулой  . Направлена она перпендикулярно кривошипу в данном его положении, как скорость точки, вращающейся относительно другой, неподвижной точки (O 1). Так как об этом векторе известно всё, то он подчёркнут в уравнении двумя чертами. Второе слагаемое правой части
. Направлена она перпендикулярно кривошипу в данном его положении, как скорость точки, вращающейся относительно другой, неподвижной точки (O 1). Так как об этом векторе известно всё, то он подчёркнут в уравнении двумя чертами. Второе слагаемое правой части  является, по существу, вектором относительной скорости точки A 3 относительно точки A. Он направлен вдоль вертикального элемента кулисы 3 и подчёркнут одной чертой, так как известен один его параметр (направление).
является, по существу, вектором относительной скорости точки A 3 относительно точки A. Он направлен вдоль вертикального элемента кулисы 3 и подчёркнут одной чертой, так как известен один его параметр (направление). , выражающий скорость точки A конца кривошипа и направленный перпендикулярно кривошипу. Из его конца, согласно правилу сложения векторов, проводится линия действия вектора относительной скорости
, выражающий скорость точки A конца кривошипа и направленный перпендикулярно кривошипу. Из его конца, согласно правилу сложения векторов, проводится линия действия вектора относительной скорости  в соответствующем направлении. Затем из полюса П проводится линия действия вектора
в соответствующем направлении. Затем из полюса П проводится линия действия вектора  до пересечения с предыдущей вертикальной прямой. Точка пересечения a 3даёт величины и направления скоростей
до пересечения с предыдущей вертикальной прямой. Точка пересечения a 3даёт величины и направления скоростей  .
. , в котором
, в котором  является вектором абсолютного ускорения точки A 3 кулисы, а следовательно, и самой кулисы. Это ускорение направлено вдоль горизонтальной направляющей, т. е. известно по направлению линии действия, поэтому подчёркнуто одной чертой. Первое слагаемое правой части
является вектором абсолютного ускорения точки A 3 кулисы, а следовательно, и самой кулисы. Это ускорение направлено вдоль горизонтальной направляющей, т. е. известно по направлению линии действия, поэтому подчёркнуто одной чертой. Первое слагаемое правой части  есть ускорение точки A конца кривошипа, по величине равное
есть ускорение точки A конца кривошипа, по величине равное  (оно представляет собой нормальную составляющую ускорения точки A, в то время как тангенциальная составляющая ускорения этой точки равна нулю в силу постоянства угловой скорости кривошипа). Это ускорение направлено от точки A к центру O 1 вращения кривошипа. Таким образом, это слагаемое полностью известно и подчёркнуто в уравнении двумя чертами. Второе слагаемое правой части
(оно представляет собой нормальную составляющую ускорения точки A, в то время как тангенциальная составляющая ускорения этой точки равна нулю в силу постоянства угловой скорости кривошипа). Это ускорение направлено от точки A к центру O 1 вращения кривошипа. Таким образом, это слагаемое полностью известно и подчёркнуто в уравнении двумя чертами. Второе слагаемое правой части  представляет собой вектор относительного ускорения точки A 3 относительно точки A. Он пока неизвестен по величине, а что касается направления, то о нём можно сказать, что оно известно по положению линии действия, направленной параллельно вертикальному элементу кулисы 3. Поэтому данный вектор в уравнении ускорений подчёркнут одной чертой.
представляет собой вектор относительного ускорения точки A 3 относительно точки A. Он пока неизвестен по величине, а что касается направления, то о нём можно сказать, что оно известно по положению линии действия, направленной параллельно вертикальному элементу кулисы 3. Поэтому данный вектор в уравнении ускорений подчёркнут одной чертой. . Из полюса параллельно кривошипу, в направлении от его точки A к центру вращения кривошипа O 1 направляем вектор
. Из полюса параллельно кривошипу, в направлении от его точки A к центру вращения кривошипа O 1 направляем вектор  в виде отрезка
в виде отрезка  . Из его конца a проводим вертикальную прямую, имея в виду, что на ней должен лежать вектор
. Из его конца a проводим вертикальную прямую, имея в виду, что на ней должен лежать вектор  определяет величины и направления искомых векторов
определяет величины и направления искомых векторов  и
и  .
. ;
; (
( – отрезок плана скоростей);
– отрезок плана скоростей); ;
; (
( кривошипа 1 на его радиус
кривошипа 1 на его радиус  , т. е.
, т. е.  и направлена перпендикулярно кривошипу в сторону движения точки А. Ускорение точки А по величине равно произведению квадрата угловой скорости кривошипа также на его радиус, то есть
и направлена перпендикулярно кривошипу в сторону движения точки А. Ускорение точки А по величине равно произведению квадрата угловой скорости кривошипа также на его радиус, то есть  и направлено от точки А к точке О 1, так как совпадает с нормальной составляющей полного ускорения точки А из-за равенства нулю тангенциальной составляющей ускорения (угловое ускорение кривошипа принимается равным нулю). Точка А принадлежит не только кривошипу, но и шатуну 2 и принимается в качестве полюса относительного вращения точки В. Так что в данном механизме переносным движением точки B является её поступательное движение вместе с точкой A, а относительным движением – её вращательное движение относительно этой точки.
и направлено от точки А к точке О 1, так как совпадает с нормальной составляющей полного ускорения точки А из-за равенства нулю тангенциальной составляющей ускорения (угловое ускорение кривошипа принимается равным нулю). Точка А принадлежит не только кривошипу, но и шатуну 2 и принимается в качестве полюса относительного вращения точки В. Так что в данном механизме переносным движением точки B является её поступательное движение вместе с точкой A, а относительным движением – её вращательное движение относительно этой точки.
 , то есть скорость точки В равна скорости точки А плюс скорость точки В относительно точки А. В этом равенстве первое слагаемое правой части известно по величине и направлению (подчёркнуто двумя чертами), второе слагаемое направлено перпендикулярно шатуну 2 в данном положении, то есть известно только по направлению (подчёркнуто одной чертой), и, наконец, вектор левой части направлен параллельно направляющим ползуна (также подчёркнут одной чертой). При этих условиях треугольник скоростей легко строится в предварительно выбранном масштабе
, то есть скорость точки В равна скорости точки А плюс скорость точки В относительно точки А. В этом равенстве первое слагаемое правой части известно по величине и направлению (подчёркнуто двумя чертами), второе слагаемое направлено перпендикулярно шатуну 2 в данном положении, то есть известно только по направлению (подчёркнуто одной чертой), и, наконец, вектор левой части направлен параллельно направляющим ползуна (также подчёркнут одной чертой). При этих условиях треугольник скоростей легко строится в предварительно выбранном масштабе  (рис. 3.7, б) по правилу сложения векторов.
(рис. 3.7, б) по правилу сложения векторов.
 выполняется следующим образом. Согласно теореме подобия, фигура, образованная векторами относительных скоростей звена на плане скоростей, подобна фигуре звена на плане механизма. Исходя из этого, можно записать пропорцию
выполняется следующим образом. Согласно теореме подобия, фигура, образованная векторами относительных скоростей звена на плане скоростей, подобна фигуре звена на плане механизма. Исходя из этого, можно записать пропорцию ,
, . Построив этот отрезок на плане скоростей, получим точку
. Построив этот отрезок на плане скоростей, получим точку  , соединив которую с полюсом плана, находим вектор
, соединив которую с полюсом плана, находим вектор  , в котором первый вектор правой части известен полностью, второй неизвестен ни по величине, ни по направлению. Вектор левой части известен по направлению – он направлен параллельно направляющим ползуна.
, в котором первый вектор правой части известен полностью, второй неизвестен ни по величине, ни по направлению. Вектор левой части известен по направлению – он направлен параллельно направляющим ползуна.  . Первое слагаемое представляет собой относительное нормальное ускорение, направленное от точки В к точке А и равное по величине частному от деления квадрата относительной скорости на длину шатуна, то есть
. Первое слагаемое представляет собой относительное нормальное ускорение, направленное от точки В к точке А и равное по величине частному от деления квадрата относительной скорости на длину шатуна, то есть  . Второе слагаемое, относительное тангенциальное ускорение направлено перпендикулярно шатуну 2 и неизвестно по величине. Теперь план ускорений строится без затруднений с применением заранее выбранного масштаба
. Второе слагаемое, относительное тангенциальное ускорение направлено перпендикулярно шатуну 2 и неизвестно по величине. Теперь план ускорений строится без затруднений с применением заранее выбранного масштаба  . План ускорений данного механизма представлен на рис. 3.7, в.
. План ускорений данного механизма представлен на рис. 3.7, в. ,
,  ;
; ,
,  ;
; ,
,  ;
; ,
,  ;
; ,
,  ;
; ,
,  ;
; ,
,  ,
,  ;
; ,
,  .
. . Треугольник скоростей строится так же, как и ранее для группы второго вида, но вектор скорости точки B направляется перпендикулярно звену 3 (рис. 3.8, б). Векторы скоростей центров масс S 2 шатуна 2 и S 3 коромысла 3 находятся по теореме подобия, как описано выше.
. Треугольник скоростей строится так же, как и ранее для группы второго вида, но вектор скорости точки B направляется перпендикулярно звену 3 (рис. 3.8, б). Векторы скоростей центров масс S 2 шатуна 2 и S 3 коромысла 3 находятся по теореме подобия, как описано выше. План ускорений строится согласно векторному уравнению
План ускорений строится согласно векторному уравнению ,
, . В результате получается система двух уравнений с четырьмя неизвестными, которая легко решается графическим путём. Величины, подчёркнутые двумя чертами, вычисляются следующим образом:
. В результате получается система двух уравнений с четырьмя неизвестными, которая легко решается графическим путём. Величины, подчёркнутые двумя чертами, вычисляются следующим образом: ,
, 


