Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Основные кинематические и силовые отношения в передачахСодержание книги
Поиск на нашем сайте
1.4. В механических передачах ведомыми звеньями называют детали передач (катки, шкивы, зубчатые колеса и т. п.), получающие движение от ведущих звеньев.
Рис. 1.8. Трехступенчатая передача
Рис. 1.9. Кинематика цилиндрической передачи В машиностроении принято обозначать угловые и окружные скорости, частоту вращения, диаметры вращающихся деталей ведущих валов индексами нечетных цифр, ведомых — четными. Например, для колес трехступенчатой передачи (рис. 1.8) обозначения частот вращения следующие: л, — ведущего вала I; п3 — ведущей шестерни вала II; п5 — ведущей шестерни вала III; п2 — промежуточного ведомого вала II; п4 — ведомого колеса вала III; п6 — ведомого колеса вала IV. Начертите в конспекте трехступенчатую передачу (рис. 1.8) и обозначьте диаметры ведущих и ведомых катков буквой D с соответствующим'индексом.
1.5. Все механические передачи характеризуются передаточным числом или отношением. Рассмотрим работу двух элементов передачи (рис. 1.9), один из которых будет ведущим, а второй —.ведомым. Введем следующие обозначения: ω1 и п1 — угловая скорость и частота вращения ведущего вала, выраженные соответственно рад/с и об/мин; ω2 и п2 — угловая скорость и частота вращения ведомого вала; D1 и D2 - диаметры вращающихся деталей (шкивов, катков и т. п.); v1 и v2 — окружные скорости, м/с. Отношение диаметров ведомого элемента передачи к ведущему называют передаточным числом u = D2/D1. (1.1) Если известны параметры передачи — диаметры D1 и D2 или числа зубьев z1 и z2, передаточное число и определяем следующим образом. Для зубчатых передач передаточное число и — отношение числа зубьев ведомого колеса к числу зубьев ведущего колеса, т. е. и = z2 /z1, где z2 и z1 — числа зубьев соответственно ведомого и ведущего колеса. Итак, передаточное число U=ω1/ω2=n1/n2=D2/D1=z2/z1 (1.2) (обратите внимание на индексы у букв ω, п, D и z.); фрикционной передаче без учета скольжения. Если и> 1, передачу называют понижающей, если и < 1 — повышающей. В приводах с большим передаточным числом (до и= 1000 и выше), составленных из нескольких последовательно соединенных передач (многоступенчатые передачи), передаточное число равно произведению передаточных чисел каждой ступени передачи, т. е.
Uобщ=u1·u2·…un. (1.3) Запишите в конспект формулу для определения передаточного числа одноступенчатой передачи, если известны диаметры колес передачи и их угловые скорости.
1.6. Передача мощности от ведущего вала к ведомому всегда сопровождается потерей части передаваемой мощности вследствие наличия вредных сопротивлений (трения в движущихся частях, сопротивления воздуха и др.). Если Р, — мощность на ведущем валу, Р2 — на ведомом валу, то Р1 > Р2. Отношение значений мощности на ведомом валу к мощности на ведущем валу называют механическим коэффициентом полезного действия (КПД) и обозначают буквой η: η = Р2/Р1. (1.4) Общий КПД многоступенчатой последовательно соединенной передачи определяют по формуле ηобщ=η1·η2·…·ηn, (1.5) где η1·η2·…·ηn — КПД, учитывающие потери в отдельных кинематических парах передачи. Исходя из условия (1.4), Р2 = Р1η, определите зависимость между вращающими моментами Т1 и T2 (запишите в конспект формулу).
1.7. Прежде чем перейти к изучению следующего параграфа, Вам необходимо проверить свои знания по контрольной карточке 1.2.
Контрольная карточка 1.2
§ 4. Механизмы преобразования одного вида движения в другой (общие сведения) В данном учебнике «Детали машин» в пределах учебной программы рассматриваются рычажные, кулачковые и храповые механизмы: назначение, принцип работы, устройство, область применения. Подробно тема § 4 изучается в курсе «Теория механизмов и машин». Рычажные механизмы. Рычажные механизмы предназначены для преобразования одного вида движения в другое, колебательное вдоль или вокруг оси. Наиболее распространенные рычажные механизмы — шарнирный четырехзвенный, кривошип-но-ползунный и кулисный.
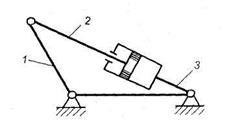
Шарнирный четырехзвенный механизм (рис. 1.10) состоит из кривошипа 7, шатуна 2 и коромысла 3. В зависимости от соотношения длин рычагов 1, 2, 3 механизм и его звенья будут выполнять разные функции. Механизм, изображенный на рис. 1.10, со звеном 1, наиболее коротким из всех, называется однокривошипным. При вращении кривошипа. 1 вокруг оси О, коромысло 3 совершает колебательное движение вокруг оси О2, шатун 2 совершает сложное плоскопараллельное движение. Кривошипно-ползунный механизм получают из шарнирного четырехзвен-ника при замене коромысла 3 ползуном 3 (рис. 1.11). При этом вращение кривошипа 1, ползун 3 совершает колебательное прямолинейное движение вдоль направляющей ползуна. В двигателях внутреннего сгорания, таким ползуном, является поршень, а направляющей — цилиндр. Кулисные механизмы служат для преобразования равномерно-вращательного движения кривошипа в качательное движение кулисы или неравномерное прямолинейное колебательное (возвратно-поступательное) движение ползуна. Кулисные механизмы используются в строгальных станках, когда рабочий ход (снятие стружки) происходит медленно, а нерабочий ход (возвращение резца) — быстро. На рис. 1.12 показана схема кулисного механизма с входным поршнем на шатуне. Такая схема используется в механизмах гидронасосов ротационного типа с вращающимися лопастями, а также в различных гидро- или пневмоприводах механизма с входным поршнем 3 на шатуне, скользящем в качающемся (или вращающемся) цилиндре.
Рис. 1.10. Шарнирный четырехзвенный механизм: 1 — кривошип; 2 — шатун; 3 — коромысло
Рис. 1.11. Кривошипно-шатунный механизм: 1 — кривошип; 2 — шатун; 3 — ползун
Рис. 1.12. Кулисный механизм: / — кривошип; 2 — шатун; 3 — поршень
Кулачковые механизмы. Кулачковые механизмы предназначены для преобразования вращательного движения ведущего звена (кулачка) в заведомо заданный закон возвратно-поступательного движения ведомого звена (толкателя). Широко применяются кулачковые механизмы в швейных машинах, двигателях внутреннего сгорания, автоматах и позволяют получить заведомо заданный закон движения толкателя, а также обеспечить временные остановы ведомого звена при непрерывном движении ведущего. На рис. 1.13 приведены плоские кулачковые механизмы. Кулачковый механизм состоит из трех звеньев: кулачка /, толкателя 2 и стойки (опоры) 3. Для уменьшения трения в кулачковый механизм вводится ролик. Ведущим звеном в кулачковом механизме является кулачок. Кулачок может совершать как вращательное движение, так и поступательное. Движение ведомого звена — толкателя — может быть поступательным и вращательным.
Рис. 1.13. Кулачковые механизмы: / — кулачок; 2 — толкатель; 3 — стойка (опора) Недостатки кулачковых механизмов: высокие удельные давления, повышенный износ звеньев механизма, необходимость обеспечения замыкания звеньев, что приводит к дополнительным нагрузкам на звенья и к усложнению конструкции. Храповые механизмы.
Храповые механизмы относятся к механизмам прерывистого действия, которые обеспечивают движения ведомого звена в одном направлении с периодическими остановками. Конструктивно храповые механизмы делятся на нереверсивные с внутренним зацеплением и с храповым колесом, а также реверсивные в виде зубчатой рейки.
Нереверсивный храповый механизм с внутренним зацеплением (рис. 1.14).Ведущим звеном может быть как храповое колесо внутреннего зацепления /, соединенное с зубчатым колесом внешнего зацепления, так и втулка 4 с закрепленной на ней собачкой 3, подпружиненной к зубьям храпового колеса 1 пружиной 2.
Рис. 1.14. Нереверсивный храповый механизм с внутренним зацеплением: 1 — храповое колесо; 2 — пружина; 3 — собачка; 4 — втулка
В нереверсивных механизмах (рис. 1.15) храповое колесо выполняют в виде рейки 1 в направляющих, и тогда собачка 2 сообщает рейке с храповым зубом прерывистое прямолинейное движение. В этом случае предусматривает устройство, которое возвращает рейку в начальное положение.
Рис. 1.15.Нереверсивный храповый механизм: Рис. 1.16. Реверсивный храповый механизм: 1 — рейка; 2 — собачка 1- храповик; 2 — ведущий рычаг; 3 — собачка
Реверсивные храповые механизмы (рис. 1.16) имеют: храповое колесо 1 с зубьями эвольвентного профиля, а на ведущем рычаге 2 шарнирно устанавливают собачку 3, которую при необходимости реверса перебрасывают вокруг оси Ох. В машино- и приборостроении применяют храповые механизмы, в которых механизм (ведомое звено) двигается в одном направлении с периодическими остановками (металлообрабатывающие станки, задняя ведущая втулка у велосипеда и др.).
|
|||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-19; просмотров: 364; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.14.247.170 (0.012 с.) |



 относится к
относится к